
自动挡雨预警推送蒸发器手机在线控制装置研制
2019-10-10 02:21曹春号杨启良李加念刘小刚喻黎明
农业工程学报 2019年16期
曹春号,杨启良,李加念,刘小刚,喻黎明
自动挡雨预警推送蒸发器手机在线控制装置研制
曹春号,杨启良※,李加念,刘小刚,喻黎明
(昆明理工大学现代农业工程学院,昆明 650500)
为消除蒸发器水面蒸发量检测过程中因天然降雨对检测结果的不利影响。在脉冲式蒸发器水面蒸发量手机在线检测装置基础上增加了自动挡雨装置和天气预警及其挡雨装置是否正常运转的推送功能。该装置通过个推软件工具开发包实现了预警推送功能,并采用雨水传感器感应板输出的电信号变化感知是否出现降雨情况,实现了挡雨盖遮挡和移除的智能控制。结果表明:1)装置运行可靠,60次试验中,挡雨盖完全遮挡和回到初始位置、挡雨和移除挡雨盖成功后,收到反馈消息的成功率均为98.3%;2)装置运行稳定,支撑杆转动的理论角度与实测角度的绝对误差范围为1.6°~3.5°,最大相对误差为4.1%,最小相对误差为1.9%。田间试验结果表明,该装置适应性较强,性能良好,支撑杆转动的理论角度与实测角度的最大绝对误差为3.4°。可见,该装置不仅通过降雨感知进行挡雨,而且可以通过手机在线控制,查看降雨天气预警、挡雨盖完全遮挡蒸发器和回到初始位置是否成功的推送消息,提高了蒸发器挡雨操作的智能化水平,解决了蒸发器蒸发量检测过程中因降雨造成检测失败的突出问题。该研究为智能挡雨和消息推送技术在农业智能设备研发中的应用提供了新思路。
蒸发;传感器;降雨;蒸发器;预警推送;挡雨盖;智能挡雨
0 引 言
蒸发器水面蒸发量研究能为气象数据的预报、水资源评价、农作物的精准灌溉提供科学依据[1],但蒸发器水面蒸发量检测结果受降雨影响的突出问题已引起诸多学者的普遍关注,主要体现在使蒸发量的检测值为负值、偏小和偏大3个方面,其中,王积强等[2]提出暴雨天气因“溅水误差”存在,常出现“负蒸发”的情况。郝梅等[3-4]提出在降雨天气蒸发量出现负值是由于落入蒸发器的雨量小于初始水位值但大于蒸发量。陈天珠[5]提出强降雨天气,溅水不平衡,会导致蒸发量检测结果偏小,并提出设置防溅水圈罩,但此方法并没有在实践中应用,且在应用中需在降雨前后多次往返试验场地,自动化程度较低。曹春号等[6]研制了一种脉冲式蒸发器水面蒸发量手机在线检测装置,并提出在检测水面蒸发量的过程中,因受降雨影响导致测定值比真实值偏小。李春玲[7]根据汛期降水集中且强度大的特点,分析得出大雨滴将蒸发器内部的水溅出,导致蒸发量测得值偏大。胡微[8]利用公式推导的方式,减少降雨天气蒸发量的观测误差,但由于计算复杂和相关参数的可靠性较差,导致在实际蒸发量检测中适用性较差。孙景春[9]分析了运用蒸发器观测水面蒸发量时大雨滴引发溅水的问题,并针对溅水问题提出了相应的设想,但并没有进行实际的验证。黄锦速等[10]研究发现在强降雨天气通过对蒸发器加盖,能有效防止蒸发量测量失效。林梅香[11]通过在强降雨天气,对蒸发器加盖和不加盖两种不同情况下蒸发量进行对比分析,结果表明,对蒸发器加盖可有效地避免蒸发量偏大或测量失效,保持蒸发量的完整性及准确性。虽然以上学者针对天然降雨对蒸发器蒸发量检测结果的不利影响进行了分析,并提出了相应的设想或具体措施,但都不可避免地受到降雨的影响,且智能化水平低。目前,消息推送技术已经得到广泛应用,并取得了较好的效果[12-16],因此,通过消息推送技术和降雨的准确预报可以提前做好挡雨的准备工作。基于此,本研究研制具有自动挡雨和预警推送功能的蒸发器水面蒸发量在线检测装置,解决传统检测装置受降雨影响导致检测结果失败及降雨前后需数次前往试验场地加盖和移除等操作等突出问题,实现降雨天气的在线预警功能和挡雨装置操作成功与否的消息反馈推送,消除降雨天气对蒸发器水面蒸发量检测结果的不利影响,为蒸发器水面蒸发量的精准检测提供新的思路和方法。
1 装置总体方案设计
1.1 总体设计要求
挡雨装置应用需满足4点要求:1)能根据本地天气预报状况,提前对降雨天气发出预警通知;2)运行过程稳定可靠;3)在进行自动挡雨或移除挡雨盖操作后,操作成功与否的结果可推送至手机端;4)可进行挡雨操作的自动和在线控制。
1.2 装置挡雨工作原理
降雨自动检测采用的是雨水传感器(深圳市天士凯电子有限公司,工作电压5 V),该传感器利用雨水的导电性,将电路的通断状态转换为电信号输出,通过电压信号的变化判别是否发生降雨,由于该传感器感应板面积较小,为增加雨水滴落检测的成功率,使用20个雨水传感器,并将其并联。
未检测到雨水滴落到传感器感应板表面时,传感器输出为高电平,装置的检测状态如图1a所示,当检测到雨水滴落到传感器感应板表面时,如图1b所示,步进电机转动84.6°,使挡雨盖处于蒸发器的正上方。
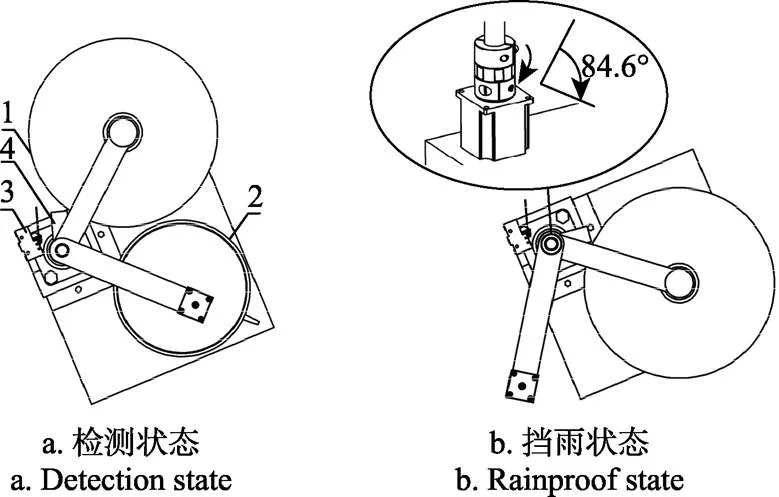
1. 挡雨盖 2. 蒸发器 3. 行程开关 4. 触杆
转动角度的精确控制通过行程开关实现,装置每次进行状态转换时,都要先逆时针转动,当触杆触碰到行程开关进行复位操作后,再逆时针转动所需的角度。
此外,操作人员也可通过手机app,发送挡雨或移除挡雨盖指令,进行挡雨或移除挡雨盖的远程在线操作。
1.3 消息推送原理
为保证消息推送的准确性与稳定性,借助个推软件开发工具包(software development kit,SDK)实现消息推送,个推是专业的为开发者提供消息推送解决方案的推送技术服务商[17-22],个推SDK具有简单易集成、应用程序编程接口(application programming interface,API)调用灵活、高并发高吞吐、稳定高效低延时的优点,因此在智能手机软件开发领域得到了广泛的应用[23-25]。其推送原理如图2所示,其中,CID为客户端软件的唯一标识。
基于TCP协议,个推服务器与物联网服务器之间保持长连接,为保证消息推送和操作系统安全,设备标记(deviceToken)是经过苹果推送通知服务(apple push notification service,APNs)加密后生成的,且在推送消息时,手机客户端不在线时,只与APNs保持长连接,由APNs负责消息的转送传达,在线时,与个推服务器之间保持长连接,直接将消息推送至客户端。
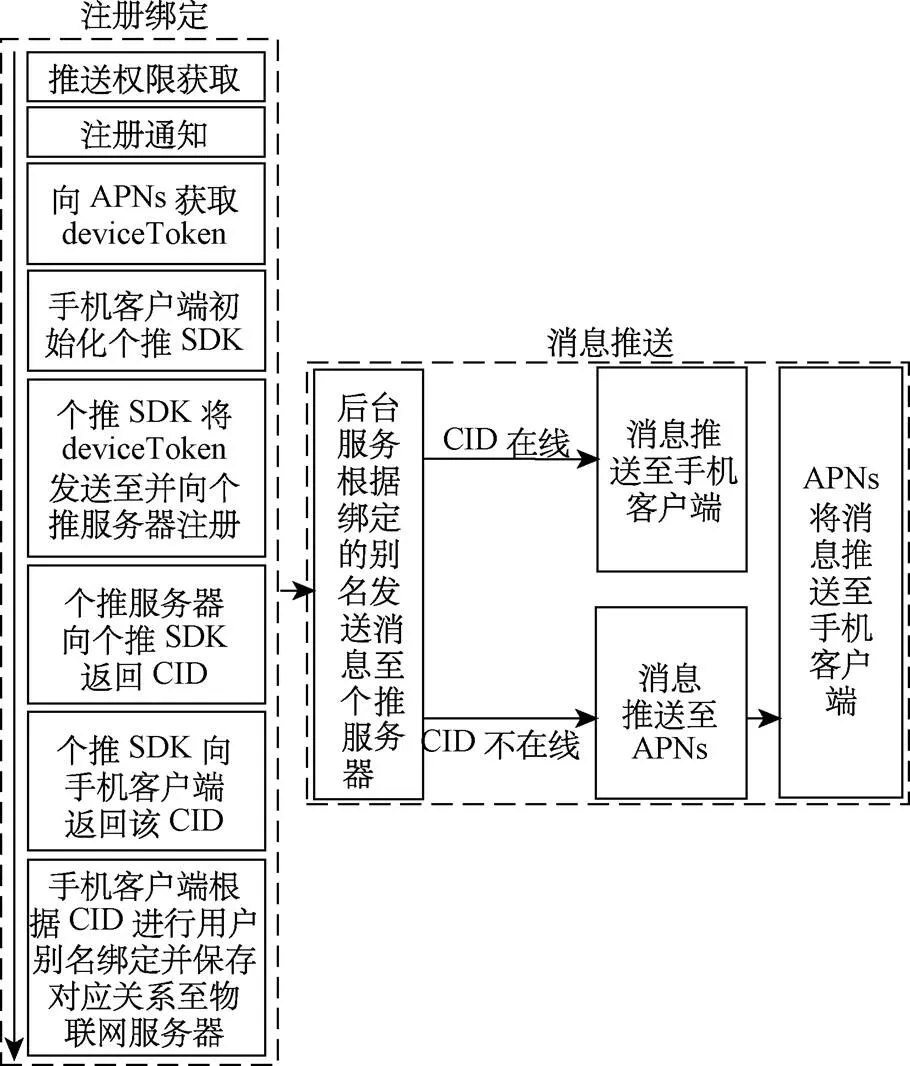
注:SDK为软件工具开发包;CID为客户端软件的唯一标识;APNs为苹果推送通知服务。
2 装置硬件改进
2.1 结构改进
为增加挡雨功能,降低成本,增强装置的实用性,在曹春号等[6]已研发设备的基础上,设计出了如图3所示的结构,旋转臂和触杆固定在支撑杆上,触杆下方固定有轴承,用以保证支撑杆在转动的时候,不会发生抖动现象。支撑杆的顺时针和逆时针方向旋转由 57BYG250B 步进电机(步距角1.8°)驱动,支撑杆穿过轴承与57BYG250B步进电机的传动轴由联轴器连接固定,行程开关安装在与触杆平行的同一平面位置,触杆在支撑杆的带动下可准确地触碰到行程开关的触点。
2.2 旋转控制
选用57BYG250B步进电机(工作电压9 V,相电流3.0 A)驱动支撑杆旋转,由A4988步进电机驱动板驱动[26]。
所需转动的角度、步距角和脉冲个数之间的关系为
N=R/S(1)
式中N为脉冲个数;R为步进电机所需转动的角度,(°);S为步距角,(°)。57BYG250B步进电机需转动的角度为84.6°,其步距角为1.8°,经计算可知,需要的脉冲个数为47个。A4988步进电机驱动板的细分参数可以通过该元件上的3个引脚MS1、MS2、MS3进行调节[27-32],如表1所示,3个引脚均设置为低电平,即57BYG250B步进电机在全步进模式下驱动支撑杆转动即可。
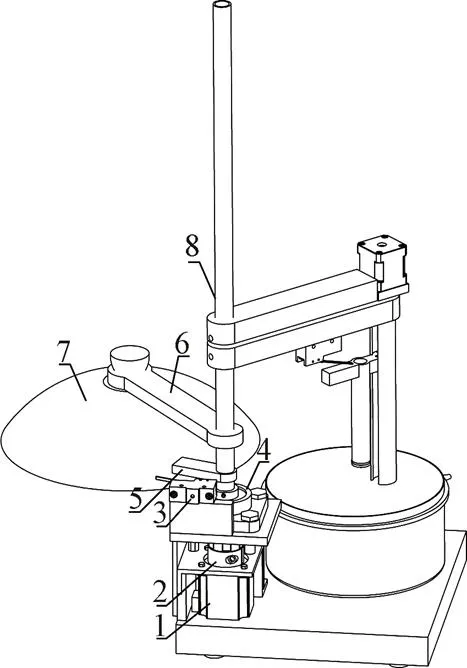
1.57BYG250B 步进电机 2.联轴器 3.行程开关 4.轴承 5.触杆 6.旋转臂 7.挡雨盖 8.支撑杆

表1 不同微步分辨率时MS1-MS3引脚的电平状态
3 底层软件与手机端软件改进
在编译器Arduino 1.8.1中运用C语言编写挡雨与移除挡雨盖函数代码,并进行封装,以便手机端程序发送挡雨指令或雨水传感器感应板检测到雨滴滴落后调用挡雨函数,待手机端程序发送移除挡雨盖指令或雨水传感器感应板变干后,调用移除挡雨盖函数。手机端程序在Xcode 9.4.1中使用Objective-C语言调用指令发送函数,并传递相应的指令参数。其程序流程图如图4所示。
在每次进行挡雨或移除挡雨盖操作后,装置都会向物联网服务器发送消息反馈操作成功与否的结果,数据格式为脚本对象表示符号(javascript object notation,JSON),物联网服务器通过解析封装消息内容,将消息传送给个推服务器,个推服务器与个推SDK根据CID进行通信,将消息推送至手机端软件。服务器定时调用天气预报的公共API,接收返回结果并解析,若结果判定为降雨天气,则向手机端软件推送降雨预警,方便蒸发量检测人员提前做好挡雨准备。

图4 挡雨操作程序流程图
4 装置性能测试
4.1 试验材料和装置
试验水样为自来水,将其盛放到150 mL量筒中。接入220 V电源使装置正常开机复位,处于蒸发量检测状态,挡雨盖停留在初始位置。试验开始前,将雨水传感器感应板表面擦干,保证是干燥无水、无尘状态,同时检查并保证WiFi信号质量正常。试验装置如图5所示。
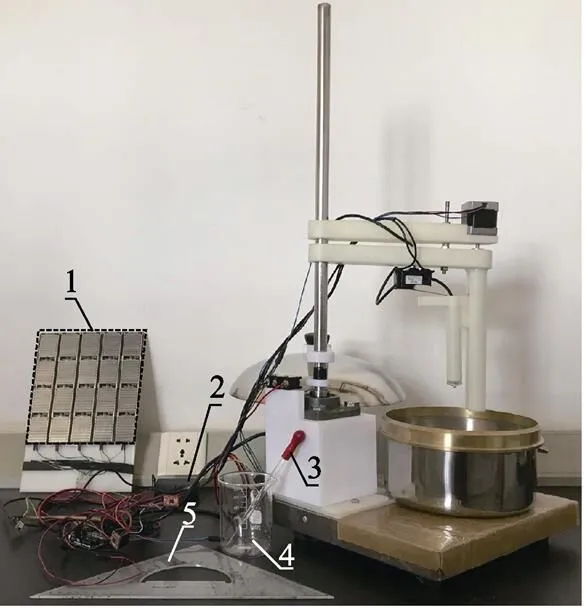
1.20个雨水传感器 2.交流转直流电源模块 3.滴管 4.150 mL量筒 5.量角尺
4.2 试验方法
装置的性能通过以下3个方面进行测试和验证:1)收到挡雨指令或雨水传感器感应板上有水滴落,通过人工观察挡雨盖能否对蒸发器实现完全遮挡,并观察接收到移除挡雨盖指令或将感应板擦干,挡雨盖能否回到初始位置;2)挡雨盖处于蒸发器正上方或回到初始位置后,查看手机端软件是否接收到操作成功的反馈消息推送;3)支撑杆转动的理论角度和实测角度对比分析。
4.2.1 挡雨装置的运行试验
挡雨盖完全遮挡蒸发器的成功率为
R=/×100% (1)
式中R为挡雨盖完全遮挡蒸发器的成功率,%;为挡雨盖完全遮挡蒸发器的成功总次数;为水滴落到传感器感应板表面或发送挡雨指令的总次数。
手机app发送移除挡雨盖指令或雨水传感器表面变干,挡雨盖回到初始位置的成功率为
C=/×100% (2)
式中C为手机app发送移除挡雨盖指令或雨水传感器表面变干,挡雨盖回到初始位置的成功率,%;为挡雨盖回到初始位置成功的总次数;为手机app发送移除挡雨盖指令或把雨水传感器表面擦干的总次数。
挡雨盖处于蒸发器正上方后,手机app接收到挡雨成功的反馈消息推送的成功率为
Q=/×100% (3)
式中Q为挡雨盖处于蒸发器正上方后,手机app接收到挡雨成功的反馈消息推送的成功率,%;为收到挡雨成功反馈消息推送的总次数;为挡雨盖处于蒸发器正上方的总次数。
挡雨盖回到初始位置后,手机app接收到移除挡雨盖成功的反馈消息推送的成功率为
G=/×100% (4)
式中G挡雨盖回到初始位置后,手机app接收到移除挡雨盖成功的反馈消息推送的成功率,%;为手机app收到移除挡雨盖反馈消息推送的总次数;为挡雨盖回到初始位置的总次数。
4.2.2 挡雨装置运行的可靠性与稳定性试验
对20个雨水传感器进行编号,用滴管依次将水滴滴到每个雨水传感器的感应板或发送挡雨指令,观察挡雨盖能否成功移动至蒸发器的正上方,实现对蒸发器的完全遮挡。之后,再将雨水传感的感应板擦干或发送移除挡雨盖指令,观察挡雨盖能否成功回到初始位置。在每次消息挡雨盖回到初始位置或完全遮挡蒸发器之后,查看手机app是否收到操作成功的推送消息,并检验推送结果是否正确。
由于步进电机自身具有会发生失步现象的特性,需要在进行挡雨操作后,将步进电机驱动支撑杆旋转的理论角度与实测角度进行对比分析,并查看在挡雨盖是否对蒸发器实现了完全遮挡。
4.3 结果与分析
4.3.1 装置运行可靠性检验
装置运行结果如表2所示。对20个雨水传感器,3个重复试验共60个试验过程中,挡雨盖完全遮挡蒸发器测试试验,挡雨盖实现完全遮挡蒸发器的成功次数为59次,成功率为98.3%,挡雨盖处于蒸发器正上方后,手机app接收到挡雨成功的反馈消息推送的次数为59次,成功率为98.3%。挡雨盖回到初始位置测试试验中,挡雨盖回到初始位置的成功次数为59次,成功率为98.3%,挡雨盖回到初始位置后,手机app接收到移除挡雨盖成功的反馈消息推送的次数为59次,成功率为98.3%,说明装置运行可靠。5号雨水传感器的1次试验,挡雨盖没能完全遮挡蒸发器或回到初始位置的原因可能是WiFi网络信号质量变差,也可能是雨水传感器灵敏度不够造成的。
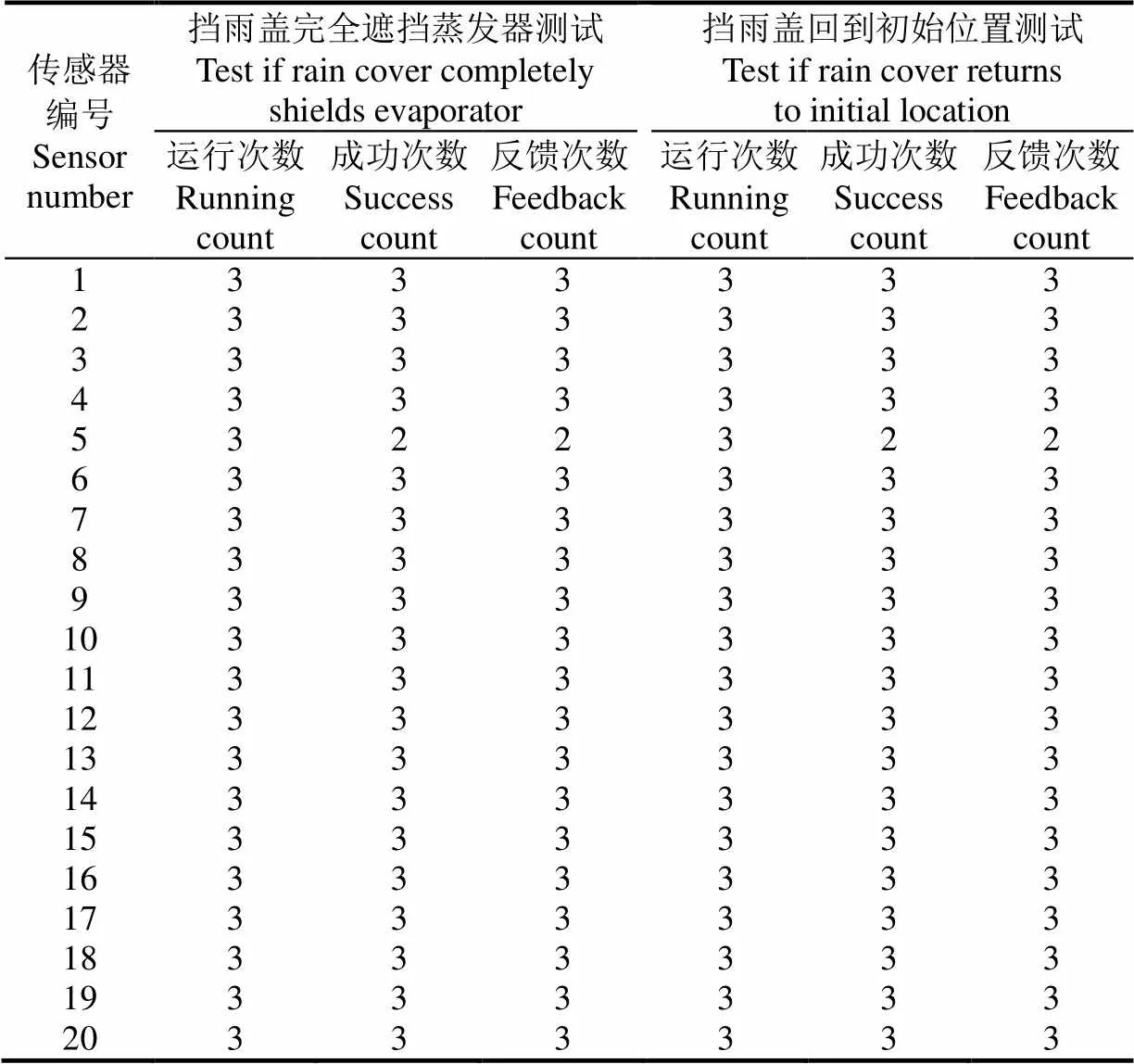
表2 挡雨装置运行试验结果
4.3.2 装置运行稳定性分析
装置运行稳定性分析见表3,由表可知,理论角度与实测角度的最大绝对误差为3.5°,最小绝对误差为1.6°,最大相对误差为4.1%,最小相对误差为1.9%,且挡雨盖均对蒸发器实现了完全遮挡,说明装置运行稳定。产生误差的原因可能是由于步进电机发生失步现象。
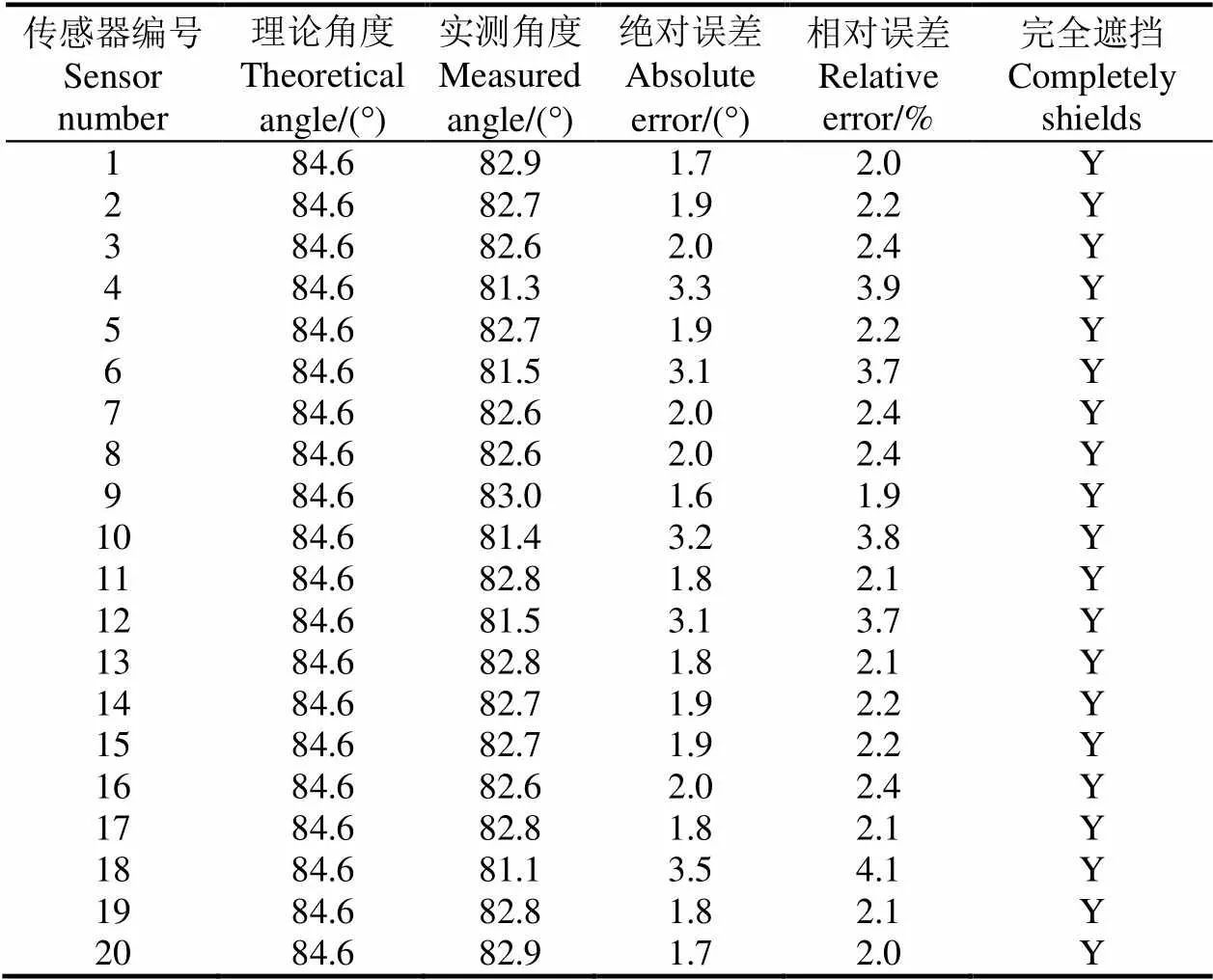
表3 支撑杆转动的理论角度与实测角度误差分析
5 田间试验
为进一步验证该装置的可靠性与适应性,田间试验于2019年3月1日—3月14日在昆明理工大学现代农业工程学院校内试验基地进行。将装置放置在露天环境的固定位置,天气晴朗时,每天前往试验场地查看挡雨盖是否处在初始位置,待出现降雨天气,从手机端查看是否收到挡雨成功的反馈信息,前往试验场地查看挡雨盖是否对蒸发器进行了完全遮挡,测量支撑杆转动的实际角度,并记录。待天气晴朗,手机端收到挡雨盖移除成功反馈后,再次前往查看雨水传感器感应板是否已经变干且挡雨盖回到了初始位置。试验完成后,将14 d所测得的支撑杆转动的理论角度与实测角度进行对比分析。结果如表4所示,支撑杆转动的理论角度与实测角度的最大误差为3.4°。且每次降雨天气,都会提前收到降雨天气预警,挡雨盖都能对蒸发器进行完全遮挡,晴朗天气,雨水传感器表面变干,挡雨盖又会完全移除,处在初始位置,在操作成功之后,手机app端均会接收到来自装置的操作成功反馈消息推送。

表4 挡雨装置田间试验结果
6 结 论
本文在脉冲式蒸发器水面蒸发量手机在线检测装置基础上,基于雨水传感器,集成个推软件工具开发包,研制了能进行自动和手机在线挡雨控制的装置。该装置在挡雨或移除挡雨盖成功后,能将操作成功的消息推送至手机软件,且提前将降雨天气的预警消息推送至手机app端,为蒸发器蒸发量检测人员提供未来降雨的有效信息。
1)该装置运行稳定可靠:支撑杆转动的理论角度与实测角度的最大绝对误差为3.5°,最小绝对误差为1.6°,最大相对误差为4.1%,最小相对误差为1.9%,挡雨盖完全遮挡蒸发器和挡雨盖回到初始位置的成功率均为98.3%。反馈消息推送可靠,挡雨和移除挡雨盖操作成功后,收到反馈消息的成功率均为98.3%。
2)田间试验结果表明,降雨预警功能效果较好,本装置可以适应田间蒸发器蒸发量检测的在线和自动挡雨控制,支撑杆转动的理论角度与实测角度之间的最大绝对误差为3.4°。
由于本文所设计的挡雨装置支撑杆旋转的动力源自步进电机,难免造成失步现象,因此后续将使用伺服电机,采用闭环算法开展研究。
[1] 沈冰,黄红虎. 水文学原理[M]. 北京:中国水利水电出版社,2008.
[2] 王积强,陆旭,刘巽民. 中国水面蒸发器的发展简史与相关技术问题探讨[J]. 水利技术监督,2011,19(3):9-11,39.
[3] 郝梅. 小型蒸发器蒸发量测定为负值的原因[J]. 广东气象,2005(3):48.
[4] 叶海宁,陶炳新,黄宏英. 小型蒸发器蒸发量测定为负值的原因及改进措施[J]. 现代农业科技,2010(18):31.
[5] 陈天珠. E601型蒸发器改进安装方式及溅水影响的初步试验研究[J]. 水文,1981(5) :24-28.
[6] 曹春号,杨启良,李加念,等. 脉冲式蒸发器水面蒸发量手机在线检测装置研制[J]. 农业工程学报,2019,35(1):106-113. Cao Chunhao, Yang Qiliang, Li Jianian, et al. Design of water surface evaporation on-line detection device of pulse type evaporator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 106-113. (in Chinese with English abstract)
[7] 李春玲. 小型蒸发器蒸发量偏大的原因[J]. 气象水文海洋仪器,2009,26(3):146-147. Li Chunling. The reason of large evaporation in small evaporator[J]. Meteorological, Hydrological and Marine Instruments, 2009, 26(3): 146-147. (in Chinese with English abstract)
[8] 胡微. 浅谈特殊雨情下E-601型蒸发器的蒸发量计算[J]. 陕西水利,2011(5):148-150.
[9] 孙景春. 大雨溅水影响E_(601)蒸发器蒸发量问题的探讨[J]. 吉林水利,2000(11):4.
[10] 黄锦速,李小红,蔡伟坤,等. 蒸发器加盖观测方法及其效果研究[J]. 气象水文海洋仪器,2014,31(2):39-41. Huang Jinsu, Li Xiaohong, Cai Weikun, et al. Observation methods of evaporator stamped and its effect study[J]. Meteorological, Hydrological and Marine Instruments, 2014, 31(2): 39-41. (in Chinese with English abstract)
[11] 林梅香. 浅谈有强降水时小型蒸发器加盖的意义[J]. 广西气象,2006(2):58. Lin Meixiang. Preliminary discussion for the significance of capping on the small evaporator when the strong precipitation occurring[J]. Journal of Guangxi Meteorology, 2006, (2): 58. (in Chinese with English abstract)
[12] 李淑华,郝星耀,周清波,等. 基于Web的自动灌溉控制系统数据实时推送设计与开发[J]. 农业工程学报,2015,31(15):133-139. Li Shuhua, Hao Xingyao, Zhou Qingbo, et al. Design and development of real time data push in web-based automatic irrigation control system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(15): 133-139. (in Chinese with English abstract)
[13] Fulcher A, Chong J H, White S A, et al. Developing a mobile application as an extension education tool: A case study using IPMPro[J]. Acta Cardiologica, 2013, 23(4): 363-81.
[14] Sharma R, Kumar A, Pandey P S, et al. Krishikosh: A digital repository to disseminate agricultural knowledge[J]. Indian Journal of Agricultural Siences, 2018, 88(5): 757-765.
[15] Kyaw T Y, Ng A K. Smart aquaponics system for urban farming[J]. Energy Procedia, 2017, 143: 342-347.
[16] Fulcher A, Chong J H, White S A, et al. Testing, promoting, and launching a mobile application as an extension tool: A case study with IPMPro[J]. Horttechnology, 2013, 23(4): 407-410.
[17] 杨立扬,成国强. 基于个推消息推送系统的手机遥控器技术研究[J]. 无线互联科技,2017,(23):142-144. Yang Liyang, Cheng Guoqiang. Study on mobile phone remote control technology based on getui message push system[J]. Wireless Internet Technology, 2017, (23): 142-144. (in Chinese with English abstract)
[18] 李立,李柳音. 数用“个旅”,游有智慧 以个推大数据为基础,助力智慧旅游发展[J]. 信息化建设,2017(3):50-51.
[19] 钟石根,张良杰. 基于个推的“好售平台”聊天推送功能的实现[J]. 计算机光盘软件与应用,2014,17(20): 57-58.
[20] 黄园. 基于图像的车内生命体检测系统设计与实现[D]. 南昌:江西师范大学,2017.Huangyuan. Design and Implementation of An In-car Life Detection System Based on Image[D]. Nanchang: Jiangxi Normal University, 2017. (in Chinese with English abstract)
[21] 高敏花. 工业远程故障诊断与维护系统研究[D]. 包头:内蒙古科技大学,2015. Gao Minhua. Research on Fault Diagnosis and Maintenance System in Industrial Remote Control[D]. Baotou: Inner Mongolia University of Science and Technology, 2015. (in Chinese with English abstract)
[22] 田润亚. 药品网络销售系统的设计与开发[D]. 南京:东南大学,2017. Tian Runya. Design and Development of Online Medical Sales System[D]. Nanjing: Southeast University, 2017. (in Chinese with English abstract)
[23] 赖正华. 基于Android和移动GIS的智能交通辅助系统[D].贵阳:贵州大学,2015. Lai Zhenghua. Intelligent Traffic Assistant System Based on Android and Mobile GIS[D]. Guiyang: Guizhou University, 2015. (in Chinese with English abstract)
[24] 周轩. 基于Android的汽车4S店服务管理系统设计与实现[D]. 北京:北京工业大学,2017. Zhou Xuan. The Design and Implementation of Auto 4S Shop Service Management System Based on Android[D]. Beijing: Beijing University of Technology, 2017. (in Chinese with English abstract)
[25] 李向前. 基于iOS的物流撮合交易系统的设计与实现[D].北京:北京邮电大学,2018. Li Xiangqian. Design and Implementation of Logistics Matching Transaction System Based on iOS[D]. Beijing: Beijing University of Posts and Telecommunications, 2018. (in Chinese with English abstract)
[26] 孙骏荣,苏海永. 用 Arduino 全面打造物联网[M]. 北京:清华大学出版社,2016.
[27] 严天辰,董昭阳,尹振红. 智能课桌控制系统设计[J]. 产业与科技论坛,2018,17(19):72-73.
[28] 李天成. 基于总线控制技术的光纤定位系统设计[D]. 合肥:中国科学技术大学,2017. Li Tiancheng. Design of Multi-motor Distributed Control System for Optical Fibers Positioning Based on CAN Bus[D]. Hefei: China University of Science and Technology, 2017. (in Chinese with English abstract)
[29] 李秋实. 3D打印控制方案设计与实现[D]. 武汉:湖北工业大学,2016. Li Qiushi. Control Scheme Design and Implementation of 3D Printing[D]. Wuhan: Hubei University of Technology, 2013. (in Chinese with English abstract)
[30] 蓝杰,张浩然. 基于STM32的微型步进电机驱动控制器设计[J]. 微型机与应用,2015,34(1):43-46. Lan Jie, Zhang Haoran. Design of micro stepping motor drive controller based on STM32[J]. Microcomputer & Its Applications, 2015, 34(1): 43-46. (in Chinese with English abstract)
[31] 谭秀腾,郭小定,李小龙,等. 基于ARM的桌面型3D打印机控制系统设计[J]. 应用科技,2014,41(5):57-61,66. Tan Xiuteng, Guo Xiaoding, Li Xiaolong, et al. Design of desktop 3D printer control system based on ARM[J]. Applied Science and Technology, 2014, 41(5): 57-61, 66. (in Chinese with English abstract)
[32] 汪静. 金属高能脉冲熔积快速成型系统关键技术研究[D]. 银川:宁夏大学,2014. Wangjing. A Metal High-Energy Pulse Deposition Rapid Prototyping System Research on Key Technology[D]. Yinchuan: Ningxia University, 2014.
Design of mobile phone on-line control device for evaporator with automatic rainproof and early warning push function
Cao Chunhao, Yang Qiliang※, Li Jianian, Liu Xiaogang, Yu Liming
(650500,)
In this research, in order to eliminate the adverse effect of rainfall weather on the detection results of evaporator water surface evaporation, a mobile phone on-line control device for evaporator based on automatic rainproof and early warning push function was designed. The device consists of 57BYG250B stepper motor, coupler, limit switch, bearing, touch rod, rotating arm, 20 rain sensors and rain cover. The rotating arm and the touch rod were fixed on the supporting rod, and a bearing was fixed below the touch rod to ensure that the supporting rod would not flutter when it rotated. The clockwise and counterclockwise rotation of the supporting rod were driven by 57BYG250B stepper motor. The drive shaft of the supporting rod passing through the bearing and the 57BYG250B stepper motor were connected and fixed by the coupler. The limit switch was installed in the same plane position and parallel to the touch rod. A rotating arm was fixed on the supporting rod, and the rain cover was installed on the rotating arm. The output shaft of 57BYG250B stepper motor was connected with the supporting rod through the coupler. 20 rain sensors were connected in parallel to automatically detect whether there is rainfall by judging if the rain sensors output low level. The rotation of 57BYG250B stepper motor drove the rain cover to completely shield the evaporator and returned to its initial position. The data transmission format between Internet of Things server and push server, Internet of Things server and mobile app, Internet of Things server and the device developed is JSON. The Internet of Things server was called public API of weather forecast regularly, and the mobile terminal integrated GeTui SDK for rainfall warning, evaporator completely-shielded and backed to initial position. The MCU program uses C language to compile the code of rainproof and removal of rain cover, and encapsulates it. The mobile program sent rainproof instructions or the rain sensor detected rainwater falling on the surface of the sensor, which would call the rainproof function. When the mobile program issued a rain-shield removal instruction or the rain sensor was dried, the rain-cover removal function was produced. The mobile program called the instruction sending function in Objective-C language and passed the corresponding instruction parameters. The stability and reliability of the device were verified by testing the performance of 20 rain sensors and 57BYG250B stepper motor. The results showed that 1) the device was reliable in operation. In 60 tests, the success rate of complete shelter and returning to the initial position of the rain shield was 98.3%; 2) the operation of the device was stable, and the error range of the theoretical angle of the support rod rotation and the measured angle was 1.6°-3.5°, the maximum relative error was 4.1%, and the minimum relative error was 1.9%; 3) In the reliable test of 60 message pushes, the success rate of receiving feedback messages was 98.3% after the rain and the rain cover were removed successfully. Field test results showed that 5 days in 14 days are rainy days. The rain warning message has been
before it rains. The device has strong adaptability and good performance and its maximum error range was 3.4°. The device could not only automatically passes perception of rainfall to rainproof, but also be operated online by mobile phone to give early warning notice for rainy weather. The successful push message of the evaporator completely blocked by the rain cover and returned to the initial position, which improved the intelligent level of the evaporator rainproof operation. This research provided new ideas for the application of intelligent rainproof technology and message push technology in the development of agricultural intelligent equipment.
evaporation; sensors; precipitation; evaporator; warning push; rain cover; intelligent rainproof
2019-04-23
2019-07-05
国家自然科学基金(51779113);云南省教育厅科学研究基金研究生项目(2019Y0032)
曹春号,主要从事农业智能化检测与控制技术研究。Email:751627024@qq.com
杨启良,教授,博士,主要从事高新技术在农业工程中的应用研究。Email:yangqilianglovena@163.com
10.11975/j.issn.1002-6819.2019.16.016
TP212.6
A
1002-6819(2019)-16-0145-07
曹春号,杨启良,李加念,刘小刚,喻黎明.自动挡雨预警推送蒸发器手机在线控制装置研制[J]. 农业工程学报,2019,35(16):145-151. doi:10.11975/j.issn.1002-6819.2019.16.016 http://www.tcsae.org
Cao Chunhao, Yang Qiliang, Li Jianian, Liu Xiaogang, Yu Liming. Design of mobile phone on-line control device for evaporator with automatic rainproof and early warning push function[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(16): 145-151. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.16.016 http://www.tcsae.org
猜你喜欢
水利建设与管理(2022年9期)2022-10-15
环球时报(2021-07-27)2021-07-27
音乐天地(音乐创作版)(2020年8期)2020-12-06
安徽工业大学学报(自然科学版)(2018年1期)2018-08-09
发明与创新·中学生(2018年1期)2018-02-02
中国新闻周刊(2017年23期)2017-07-12
现代农业科技(2017年10期)2017-07-12
发明与创新·大科技(2017年5期)2017-05-16
现代农业科技(2017年6期)2017-05-12
科技创新导报(2016年8期)2016-10-21
