
精密加工平台隔振系统多频振动控制
2019-10-19 01:42赖俊杰白俊峰杨泽宁代镇宇
振动与冲击 2019年10期
赖俊杰,浮 洁,白俊峰,杨泽宁,代镇宇,余 淼
(重庆大学 光电工程学院 光电技术及系统教育部重点实验室,重庆 400044)
近年来,随着精密加工与精密测量等技术的发展,微振动对精密加工精度和测量灵敏度的影响变得十分突出。现实环境中由于交通工具、人员走动、仪器设备运转和空调气流等因素不可避免的会产生振动干扰,虽然振动位移幅值在微米量级(加速度幅值在毫米每平方秒量级),但这些振动通过地面传递至精密平台后,轻则降低加工精度及测量灵敏度等,重则可能引起仪器设备误触发、误动作而导致重大生产事故[1]。而在实际工作中,精密设备常见振动频率为1~100 Hz[2],且常为多频振动。
磁流变弹性体隔振器控制是发挥其隔振性能、实现工程应用的关键,目前对该问题的研究尚处于探索阶段。根据控制算法与系统模型之间的关系,控制算法可分为依赖于模型的控制算法和不依赖于模型的算法两大类。作为依赖于模型的控制策略,Lyapunov控制[12]、clipped-optimal 控制[13]、LQR(Linear Quadratic Regulator)控制[14]、H无穷控制[15]和滑模控制[16]等已被应用于MRE隔振系统的控制中。但其要求系统模型和隔振器逆模型已知,对于具有较强非线性的MRE隔振系统而言,很难建立其精确的系统模型。因此,在实际应用中不容易获得满意的隔振效果。PID(Proportion Integration Differentiation)控制、ON-OFF控制和模糊控制等不依赖于模型的控制策略为上述问题提供了有效的解决方法。PID控制器对确定激励振动有好的抑制效果[17],但其鲁棒性差,不适于具有时变激励的隔振系统。ON-OFF控制器简单有效、易于实现,但其只有开和关两种状态,易引起被控系统的振荡。Jung等[18]针对用于建筑结构的MRE横向隔振系统,设计了模糊控制器,并通过仿真表明负载位移和加速度分别可以下降40.7%和39.1%。Li 等[19]针对用于三层建筑结构的MRE隔振系统设计了模糊控制器,通过实验验证了控制方法的有效性。由于精密加工平台在实际工作中的干扰常为多频振动,上述模糊控制器仅对单频激励有效,对多频振动难以达到满意的控制效果。Fu等[20]针对MRE隔振系统设计了模糊控制器,通过实验验证了控制方法对单频和多频振动的有效性。但所设计的控制器未能实现多频振动下的最优控制。
针对以上分析,本文提出分频模糊控制方法,即通过带通滤波器组对误差信号通过窄带滤波实现信号的分频,进而对分离的单频信号分别设计模糊控制器进行分频模糊控制。并通过实验验证控制算法的有效性。所提方法无需建立MRE隔振系统的精确模型且易于实现。
1 磁流变弹性体隔振系统动力学模型
MRE隔振系统对应的单自由度动力学模型,如图1所示。图中k0和c0分别为MRE隔振器的零场刚度和零场阻尼激励磁场引入的刚度增量;FMRE和Δc分别为隔振器的零场阻尼和激励磁场引入的阻尼增量;m为负载质量;x1和x2分别为基础位移和负载位移。系统动力学方程满足
(1)
式中:FMRE为激励磁场作用下MRE隔振器产生的驱动力。
MRE隔振器的半主动控制条件可概括为
(2)
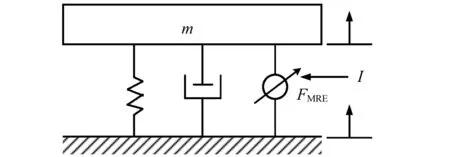
图1 MRE隔振系统单自由度动力学模型Fig.1 MRE vibration isolation system with one degree of freedom dynamics model
根据文献[21]所列方法可以求得MRE隔振器零场参数,如表1所示。

表1 零场状态MRE隔振器参数辨识结果Tab.1 Zero field state MRE isolator parameter identification results
2 分频模糊控制器设计
针对多频振动干扰控制问题,设计如图2所示的分频模糊控制器。多频加速度误差信号经过不同带通滤波器后被分离为多路单频加速度信号,然后针对单频信号分别进行模糊控制器控制,分频模糊控制后输出控制电压。
2.1 窄带带通滤波器设计
如图2所示带通滤波器在系统中有两个作用:①滤除信号传输过程中的噪声干扰;②分离多频信号。本文选取有限冲击响应(Finite Impulse Response,FIR)滤波器,为减少实时控制系统中振动加速度信号幅值失真对控制效果的影响,带通滤波器通带区内采用波动幅度为0.3 dB的等纹波设计。

图2 精密加工平台分频模糊控制器控制系统Fig.2 Precision processing platform frequency-division adaptive fuzzy controller control system
2.2 模糊控制器设计
本文将MRE隔振器的半主动控制条件融入模糊控制器的模糊规则中,采用模糊控制器实现MRE隔振器的半主动控制。以负载响应的绝对位移x1和负载与基础间的相对位移xr作为控制器的输入,以MRE隔振器的励磁电流I作为控制器的输出,主要分为精确量的模糊化、依据规则库的模糊逻辑推理和模糊量的反模糊化三个环节。
2.2.1 模糊化
模糊控制器的输入为负载的相对位移和绝对位移,是加速度传感器采集到的信号进行积分的结果,模糊控制器的输入经量化因子成比例缩放至输入论域[-7,7]内,量化因子的取值由式(3)确定
(3)
式中:k1(t)和k2(t)分别为t时刻负载的绝对位移和相对位移所对应的量化因子;A0(t)和A1(t)分别为t时刻负载绝对位移和相对位移的幅值。再经过模糊化处理,利用输入隶属度函数将输入量的精确值转化为相应的模糊量D和RD,其中输入隶属度函数如图3(a)所示。考虑到过多的语言变量将增加系统的复杂度和计算量,而较少的语言变量将使系统精度降低,故选取NB,NM,NS,ZO,PS,PM,PB七个模糊语言变量对输入隶属度函数进行描述,其中NM,NS,ZO,PS,PM采用三角形隶属度函数,NB和PB采用高斯型隶属度函数。每个输入变量的论域均被隶属度函数划分为具有重叠区域的相邻间隔,既保证了控制过程中的灵敏度,又保证了控制过程中的稳定性。
2.2.2 模糊规则及模糊推理
本文中模糊控制器的模糊规则是基于所推导的MRE隔振系统半主动控制条件设计而成,如表2所示,共包含49条模糊规则。模糊规则通常由一系列关系词连接而成,可表述为:
R1:IfDisPBandRDisPBthenUisNB
R2:IfDisPBandRDisPMthenUisNB
……
其中,U为控制器的输出值所对应的模糊子集。模糊推理是根据输入模糊量,由模糊规则完成模糊推理来获取模糊控制量的过程,本文中模糊推理采用Mamdani推理算法。
2.2.3 反模糊化
通过模糊推导所得到的控制量是模糊量,利用输出隶属度函数将输出值的模糊量U转化为相应的精确值u,其输出隶属度函数如图3(b)所示。本文中所采用的反模糊化方法为常用的重心法。精确值u经比例因子进行适当缩放,即为MRE隔振系统半主动模糊控制器所输出的控制电流
I(t)=k(t)sgn(u(t))u(t)
(4)


表2 MRE隔振器半主动模糊控制规则Tab.2 MRE isolator semi-active fuzzy control rules
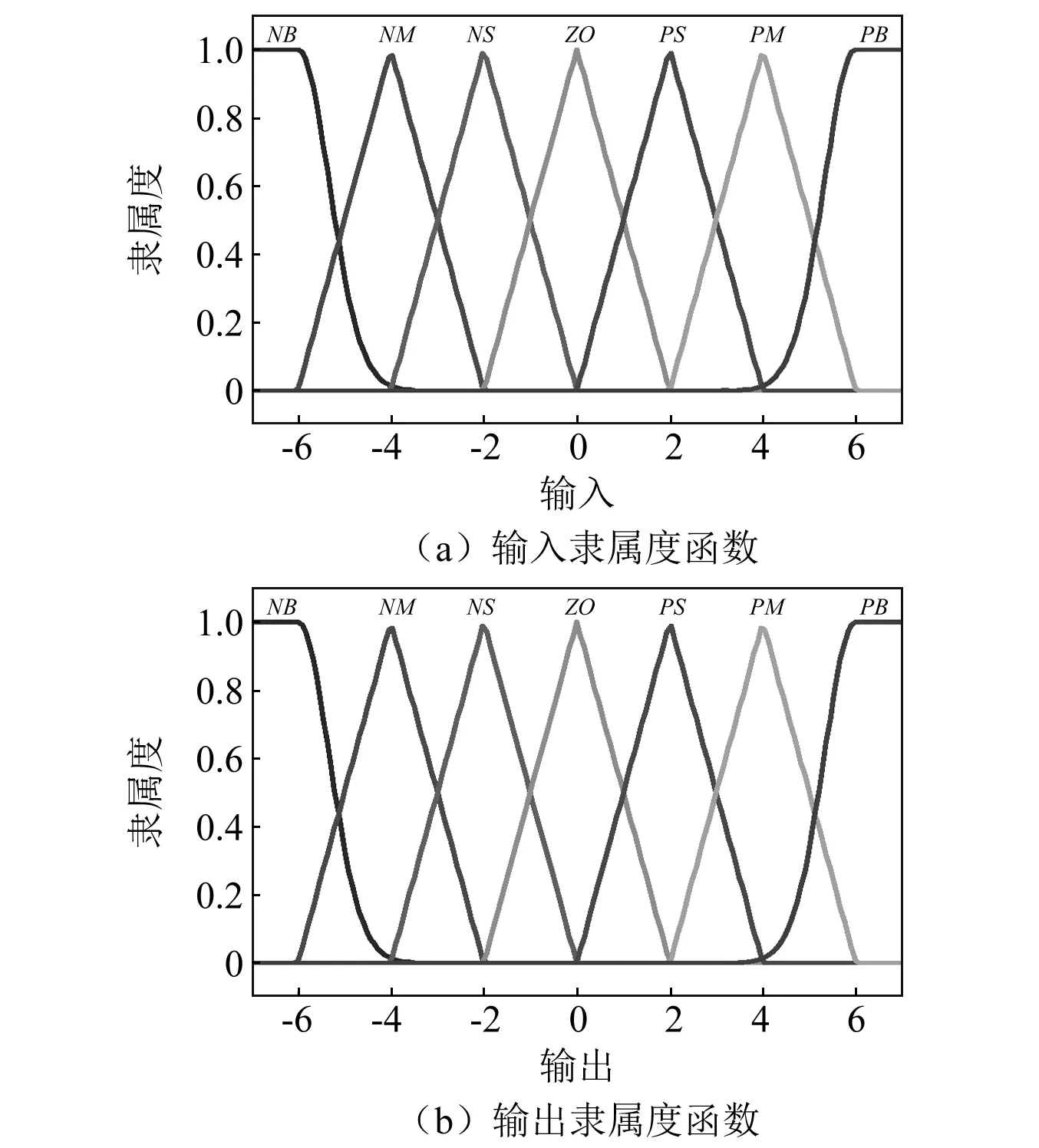
图3 模糊控制器输入输出隶属度函数Fig.3 Fuzzy controller input and output membership function
3 实验结果及分析
3.1 实验系统
MRE模糊隔振实验系统如图4所示。MRE隔振器安装在电磁激振器(JZK-50型)台面上,负载质量块与隔振器的顶部通过螺杆连接。在Matlab/Simulink中搭建基础激励信号产生模块,下载到dSPACE/Autobox半实物仿真系统(DS1005型)中输出,经功率放大器(YE5874型,联能电子,中国)放大后驱动激振器。两个压电式加速度传感器(333B52型)分别安装在激振器台面和负载质量块上以测量基础激励加速度信号和负载响应加速度信号。传感器所测得的信号为电荷信号,通过信号调理器(480B211型)转换为电压信号,然后由dSPACE/Autobox进行采集。分频模糊控制器输出的控制电流通过电流驱动器施加给MRE隔振器,一个直流电源(E3631A型)为电流驱动器供电。

图4 MRE隔振实验系统实物图Fig.4 MRE vibration isolation experiment system physical map
振动激励源对隔振对象影响最大频率点位于零场共振频率附近,因此需对以53 Hz为中心频率较宽频带内频率点振动进行抑制。
3.2 实验结果及分析
由于精密加工平台所处的工况环境多为多频混叠干扰,多频振动激励频率单频分量在零场共振频率附近选定,为40 Hz,45 Hz,50 Hz,55 Hz,60 Hz,65 Hz和70 Hz任三频率混频、加速度峰值设定为1.0 m/s2。带通滤波器参数如表3所示。分频模糊控制下响应加速度及控制电流、不同控制算法下负载响应加速度信号及加速度频谱图,如图5~图9所示,分频模糊控制算法下负载响应加速度的均方根值衰减最大可达30.58%。不同控制器下三种激励频率组的衰减率如表4所示。与常规模糊控制器相比,分频模糊控制器相较于传统模糊控制器对振动衰减性能最大增加了36%,即验证了分频模糊控制算法的优越性能。
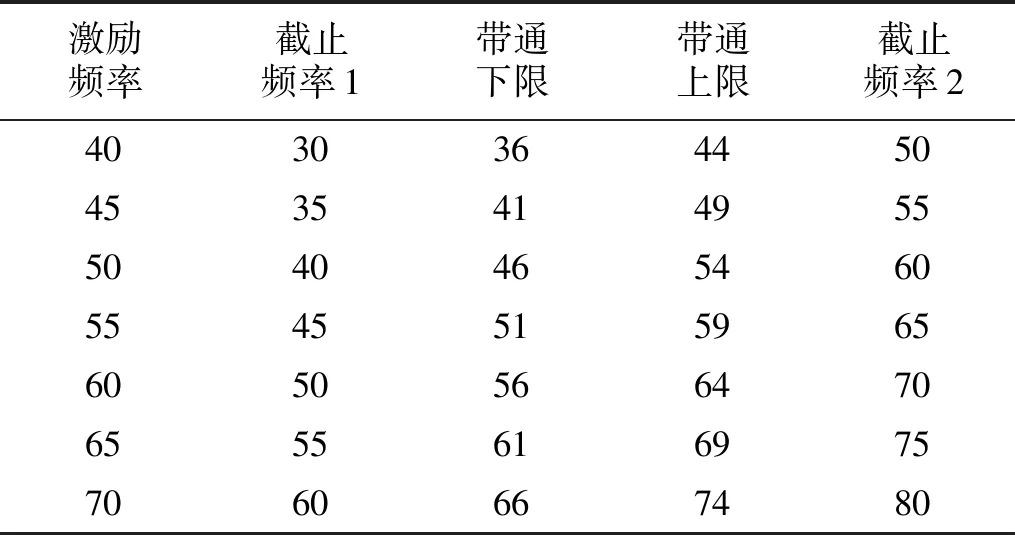
表3 各带通滤波器参数设置(采样频率:2 kHz阶次:1 012)Tab.3 Band-pass filter parameter settings(Sampling frequency:2 kHz order:1 012) Hz
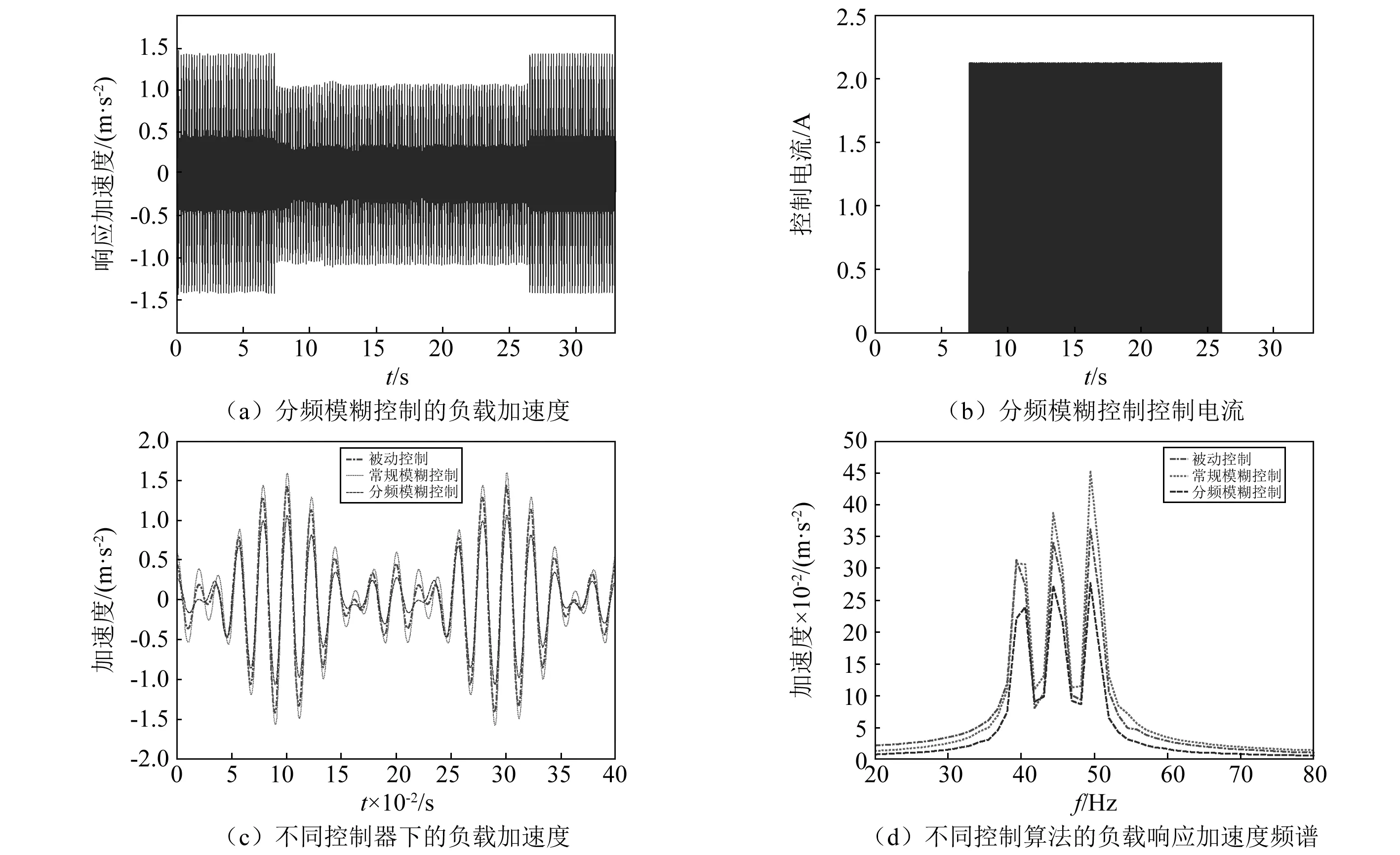
图5 40 Hz+45 Hz+50 Hz多频振动激励下的试验结果Fig.5 40 Hz+45 Hz+50 Hz multi-frequency vibration excitation test results
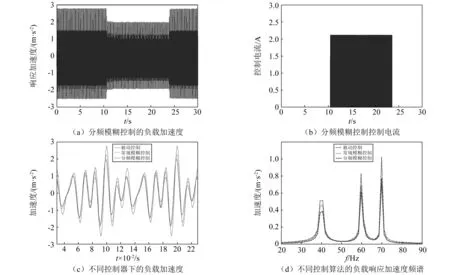
图6 40 Hz+60 Hz+70 Hz多频振动激励下的试验结果Fig.6 40 Hz+60 Hz+70 Hz multi-frequency vibration excitation test results
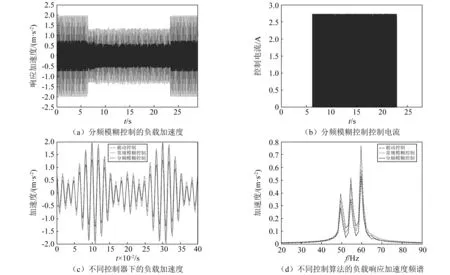
图7 50 Hz+55 Hz+60 Hz多频振动激励下的试验结果Fig.7 Test results of 50 Hz+ 55 Hz+ 60 Hz multi-frequency vibration excitation
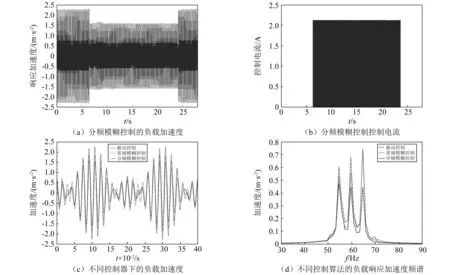
图8 55 Hz+60 Hz+65 Hz多频振动激励下的试验结果Fig.8 55 Hz+60 Hz+65 Hz multi-frequency vibration excitation test results
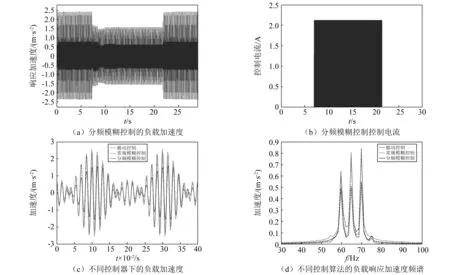
图9 60 Hz+65 Hz+70 Hz多频振动激励下的试验结果Fig.9 Test results under multi-frequency vibration excitation of 60 Hz+ 65 Hz+ 70 Hz

表4 三频混叠激励条件下各控制器控制效果Tab.4 Tri-band aliasing excitation conditions under the control of each controller
4 结 论
针对具有多频激励的精密加工平台振动问题,本文提出分频模糊控制方法。通过设计窄带滤波器对多频信号分频处理,并针对不同分频信号设计相应的模糊控制器。通过实验表明所设计的分频模糊控制器对多频激励振动抑制优于常规模糊控制器和被动控制,尤其对包含零场共振频率附近频率点的混频激励加速度传递率最大可衰减30%以上。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
成都信息工程大学学报(2021年6期)2021-02-12
现代装饰(2020年7期)2020-07-27
电子制作(2019年16期)2019-09-27
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
商(2016年28期)2016-10-27
电子制作(2016年21期)2016-05-17
火控雷达技术(2016年2期)2016-02-06
