托森差速器建模及运动仿真
2019-10-21 09:41关亮亮赖文铁徐宏波徐子豪
汽车实用技术 2019年11期
关键词:运动仿真
关亮亮 赖文铁 徐宏波 徐子豪
摘 要:汽车差速器是能够使左、右两个驱动轮实现以不同转速转动的一种机构。主要由左右半轴齿轮、行星齿轮(至少一组)及齿轮架组成。功用是当汽车转弯行驶或在不平路面上行驶时,使左右车轮以不同转速滚动,即保证两侧驱动车轮作纯滚动运动。托森(Torsen)差速器就是众多差速器中十分著名的一种。文章将针对托森差速器,在3D建模软件Solid Works中建立装配模型,并对其进行运动学仿真,通过对运动学仿真结果分析,得到其运动特性。
关键词:托森差速器;运动仿真;Solid Works
中图分类号:TP23 文献标识码:A 文章编号:1671-7988(2019)12-85-03
Abstract: Automotive differential is a mechanism which allows the left and right driving wheels rotate at different speeds. It mainly consists of left and right half axle gears, planetary gears (a pair at least) and the gear frame. Its function is to allow the left and right wheels rolling at different speeds when the car is steering or driving on uneven roads, which ensure the pure rolling motion of the driving wheels on both sides. Torsen differential is one of the most famous differentials. In this paper, the assembly model of Torson differential is built in Solid Works, which is a 3D modeling software, and its kinematics simulation is carried out. Through the analysis of kinematics simulation results, the kinematics characteristics of Torson differential are obtained.
Keywords: Torsen Differential; Kinematics Simulation; Solid Works
CLC NO.: TP23 Document Code: A Article ID: 1671-7988(2019)12-85-03
引言
汽車差速器是一种能够使左、右驱动轮实现不同速度转动的机械结构。功用是当汽车转弯或驶过不平路面时,允许左右车轮以不同转速滚动,进而保证两侧驱动车轮作纯滚动。Torsen(托森)差速器,是一种由美国人发明的差速器,从最初的A型差速器到B型,再到现在的托森C型差速器,一共经历三代产品。它利用蜗轮蜗杆传动的不可逆性原理和齿面高摩擦条件,使差速器根据其内部差动转矩的大小而自动锁死或松开,这样可以有效地提高汽车的通过能力。
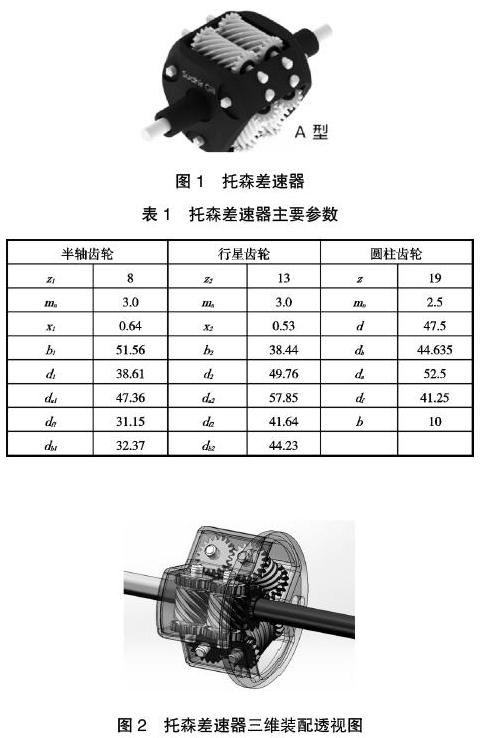
本文将针对第一代托森差速器,即A型托森差速器(如图1所示),进行3D模型建立和装配及运动仿真,并对其差速结果和运动学特性进行分析。
1 装配模型
本文章所建立3D模型的A型托森差速器,其主要参数如下:
利用三维软件Solid Works建立模型如下图所示:
2 运动仿真
2.1 仿真设置
分别按以下几种工况进行运动仿真。
1)直线行驶工况,即左右半轴以相同的速度旋转,在此工况下,将差速器壳体的转速,与其中一个半轴的转速设置成相同的数值,将另外一个半轴的转速设置成为自由输出端,同时输出左右半轴及差速器壳体的转速,并对三者的转速关系进行分析。
2)差速行驶工况,即左右半轴以不同的速度旋转,在此工况下,将差速器壳体的转速设置成为固定转速,其中一个半轴的转速设置成与差速器转速不同的数值,将另外一个半轴的转速设置成为自由输出端,同时输出左右半轴及差速器壳体的转速,并对三者的转速关系进行分析。在此种工况运动仿真中,共进行两种状态的仿真,第一种是一个半轴转速为0,第二种是将该半轴转速设置为差速器转速的一半。
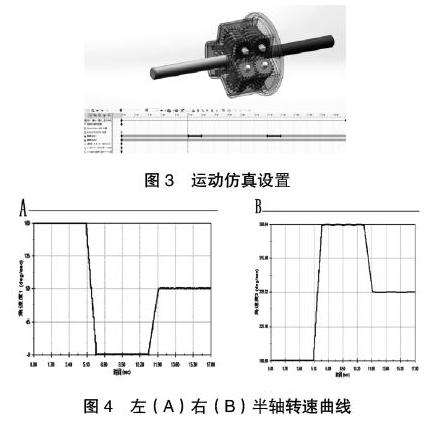
在Solid Works软件的运动仿真界面的motion分析,对黄色半轴与差速器壳体,分别设置两个马达。如下图所示:
(a)在0-5s内,两个马达以相同转速30RPM进行转动。
(b)5-6s,黄色半轴的马达速度减为0,差速器壳体仍以30RPM进行转动。
(c)6-11s,黄色半轴马达速度保持为0,差速器以30RPM进行转动。
(d)11-12s,黄色半轴的马达速度从0变为差速器壳体的一半,即15RPM,差速器壳体仍以30RPM进行转动。
(e)12-17s,黄色半轴的马达速度以15RPM转动,差速器壳体仍以30RPM进行转动。
2.2 仿真结果
仿真后可知,各部分运转啮合良好,齿轮与其他部分装配良好,无干涉现象。
最后得出各部分的转速曲线,如下图所示。由于差速器壳体在整个仿真过程中一直以固定的速度转动,所以其转速并未输出用于分析。在Solid Works软件motion模块中转速设置单位都是RPM,即每分钟旋转圈速,为方便对比,下面将RPM转为DPS,即每秒转过角度,转变关系为:30RPM=180DPS。转变后,将左右两个半轴转速曲线输出,如图4所示。
2.3 数据分析
若差速器壳体转速为n0, 左半轴转速为n1,右半轴转速为n2,由以上仿真曲线可以得出结论:
1)左右半轴与差速器壳体转速在所有工况下都满足关系:n1+n2=2n0,即两个半轴的转速之和等于2倍的差速器壳体转速。
2)直线行驶工况下,左右半轴与差速器壳体的转速相同,n1=n2= n0=180DPS。
3)当左侧半轴转速为零时,n1=0,右侧半轴的转速为壳体转速的2倍,n2=2n0。
4)当左侧半轴转速为壳体转速一半时,即n1=n0/2= 90DPS,右侧半轴的转速满足1)中所以得结论,即n2= 2n0- n1=1.5 n0=270DPS。
3 结论
通过本文中,对托森差速器进行了3D实体建模及运动仿真分析,可以得出该差速器的左右半轴和差速器壳体的转速,在不同工况下的数学关系如下。在直线行驶的工况下,左右半轴和差速器壳体的转速相同,三者同步旋转。当出现转弯或其它路况时,假设差速器壳体转速不变,其中一个半轴转速降低时,另外一个半轴的转速会出现上升的情况,且二者降幅与增幅是相同的。通过进一步分析,左右半轴和差速器壳体的转速始终满足一个关系,即n1+n2=2n0。
在此结论基础上,我们可以对该差速器的速度特性有了准确的了解,对差速器的工作方式和工作原理有了进一步的掌握。
参考文献
[1] 赵罘等.Solid Works 2018中文版机械设计从入门到精通.北京:人民邮电出版社,2018.04.
[2] 王欢等.基于Pro/E的越野车托森差速器参数化设计.长春:机械传动,2012.03.
[3] 王欢等.托森差速器中弧齿锥齿轮的三维参数化建模[J].南京:机械制造与自动化,2012.01.
[4] 侯运丰等.托森差速器的传动特性分析[J].天津:机械设计,2008.03.
[5] 向丽康. 托森差速器结构与性能[J].北京:世界汽车,1997.01.
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
教育教学论坛(2016年52期)2017-03-12
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代电子技术(2015年8期)2015-07-09