
一种具有自动调整功能的清扫车扫盘
2019-10-24 07:48山东五征集团有限公司肖学芬张西武
专用汽车 2019年10期
山东五征集团有限公司 肖学芬 张西武
汉阳专用汽车研究所 王 斌
介绍了一种具有自动调整功能的清扫车扫盘。该扫盘能够实时反馈扫刷接地压力,并通过控制系统自动调整油缸行程,从而使扫刷保持恒定的接地压力,保证了清扫车具有较好的清扫效果。同时,该扫盘机构外摆的力由气缸与连杆提供,当扫盘遇到障碍物向内移动时,冲击力完全作用在连杆上,该机构保护了气缸及气路组件免受冲击和损坏。
背景技术
扫盘是影响扫路车或扫路机清洁能力的重要结构,工作时,扫盘上的扫刷与地面存在接地压力,接地压力的大小直接影响清扫效果,并对扫刷的使用寿命产生很大影响。当扫刷接地压力过大时,会增加能耗、加快扫刷磨损;当扫刷接地压力过小时,会导致扫盘清扫能力降低,因此,扫刷接地压力要保持合适才能正常工作。

为保证清扫车清扫效果,需要频繁调整扫盘离地高度。目前的扫盘离地高度多用链条调整,如图1、图2所示,当扫刷磨损后,人工调整链条上的链环,这种频繁调整不但费时费力,还对工作人员的工作经验有较高要求,很难保证扫刷接地压力在确切合理范围内。
市场上有些清扫车的扫盘加入了气缸、油缸或气弹簧等结构使扫盘实现自适应调节。
其基本原理大致均为:压力传感器检测腔内压力,控制系统对比理论值和实测值之后,控制气缸或油缸调整扫盘的离地高度,从而调整扫盘接地压力。
但是该种结构在扫盘实际工作过程中存在的问题是:路面状况通常不是理想的水平状态,总会一定程度高低不平,从而导致地面作用在油缸或气缸轴向上的力的角度或大小或有很大变化,进一步的导致原本设定好的油缸或气缸内腔压力不具有准确参考价值,最终无法准确适时调整扫盘刷与地面有合理的接地压力。
市场上也有一些清扫车单独使用气缸推动扫盘外摆,如图3、图4所示,但当扫盘突然遇到障碍物时,比如清扫路沿石时扫盘受路沿石阻碍,图5所示,扫盘向内移动会对气缸形成冲击,引起气路内部气压增大,加速气缸损坏,引起气管快插接头松动老化,造成上装漏气等。

图1

图2
新型清扫车扫盘技术
本文介绍一种清扫车扫盘,如图6所示,该扫盘主要包括:机架、摆动杆、转动座、复位弹簧、限位杆、连杆、气缸、油缸、支撑弹簧、阻尼弹簧、力传感器、滑动轴承、扫盘组件等。

图3
独有的机构能够实时反馈扫刷接地压力,并通过控制系统自动调整油缸行程,从而使扫刷保持恒定的接地压力,保证了清扫车具有较好的清扫效果。同时,该扫盘机构外摆的力由气缸与连杆提供,当扫盘遇到障碍物向内移动时,冲击力完全作用在连杆上,该机构保护了气缸及气路组件免受冲击和损坏,延长了气缸及组件的使用寿命。
力传感器能实时检测扫刷接地压力大小,控制系统实时调整扫刷接地压力,在对接地压力的控制上比现有技术更稳定,可靠性更高,工作时的清扫效果更好。
结构设计
针对文章前面提到的现有扫盘无法自动准确调整扫盘接地压力或可靠性较低的问题,本文介绍一种可以自动调整接地压力并具有较高可靠性的扫盘机构。
如图7、图9所示,该清扫车扫盘包括支架(1)、气缸(2)、连杆1(3),连杆2(4),转动座(5),限位杆(6),复位弹簧(7),摆动架1(8),摆动臂(9)。

图4

图5

图6
所述的支架(1)通过左侧的法兰盘与车架连接,支架(1)远离法兰盘处焊接有突出件,连杆1(3)的第一端铰接在支架(1)的突出件上,铰接点为B,气缸(2)的输出端与连杆1(3)的第二端铰接点为M,用于驱动扫盘的外摆和收回,连杆1(3)的第三端和连杆2(4)的第一端铰接点为A,连杆2(4)的第二端与转动座(5)的铰接点为C。转动座(5)和摆动架1(8)通过复位弹簧(7)相连接,弹簧处于预拉伸状态,限位杆(6)固定在摆动架1(8)上,当复位弹簧拉紧后,限位杆(6)的另一端压紧在转动座(5)上,摆动架1(8)和摆动臂(9)在水平面上位置相对固定。
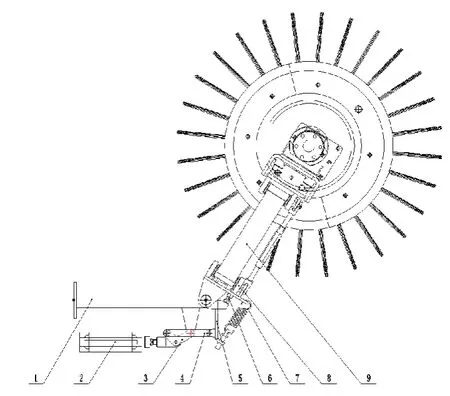
图7 本发明和实用新型扫盘外摆示意图
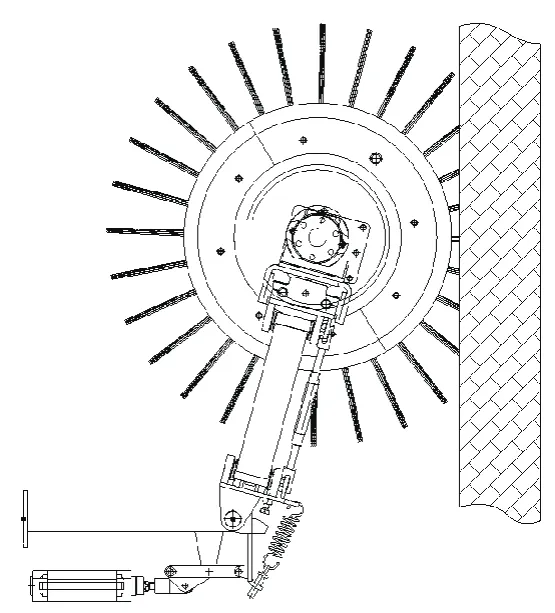
图8 本发明和实用新型扫盘避让示意图
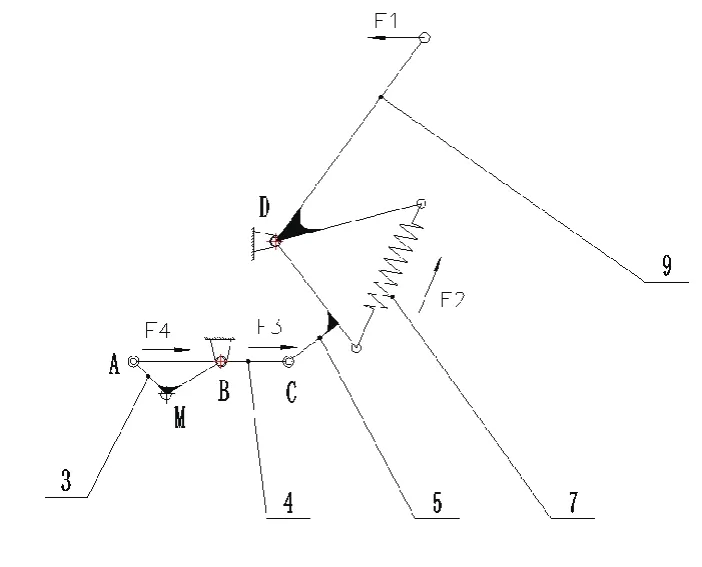
图9 本发明和实用新型扫盘避让状态连杆受力分析图
扫盘处于工作状态时,气缸内的缸杆收回,此时铰接点A、B、C共线,连杆1(3)和连杆2(4)处于死点位置。
图8所示为扫盘遇到障碍物时向内避让,其受力分析图如图9所示:扫盘受到的阻力为F1,作用在摆动臂(9)上,转动座(5)受到复位弹簧(7)的拉力为F2,连杆2(4)上的拉力为F3,连杆1(3)上的压力为F4,F3 = F4,此时连杆1(3)与气缸的铰接点M处不受力。
因此,扫盘遇到阻力时,连杆机构承担了全部分力,气缸杆的受力为0,该结构能够保护气缸及气路组件免受冲击。
当扫盘需要收回时,气缸杆推动铰接点M,连杆1(3)受到以铰接点B为中心的逆时针方向转矩,该转矩提供给连杆2(4)一个纵向推力,推动转动座(5)和摆动架(8)逆时针方向旋转,直至收回扫盘。
当清扫车的扫盘处于工作状态时,其状态如图10所示:包括稳定机构(10),液压马达(11),扫盘组件(12),调节杆(13),举升油缸(1 4)。
其中,摆动架1(8)、摆动臂(9)、调节杆(13)、摆动架2(101)共同组成平行四边形机构,举升油缸(14)铰接在摆动架1(8)的下部铰耳上,当缸杆推动摆动臂(9)上下摆动时,扫盘组件的接地角度始终保持不变。
稳定机构如图11所示,浮动板(102)用来固定扫盘组件,浮动板的两端分别与两个滑动轴承(106)固定,滑动轴承(106)沿导向轴(105)上下滑动,导向轴(105)的两端分别固定在导向轴固定座(104)上,导向轴固定座(104)固定在摆动架2(101)上。因此,浮动板(102)可以相对于摆动架2(101)上下滑动。
浮动板(102)的中部焊接有突出件(1021),该突出件位于两个导向轴固定座(104)的中间,突出件(1021)上下两个平面分别有圆形凹槽,阻尼弹簧(107)的第一端位于突出件(1021)的上部凹槽内,阻尼弹簧(107)的第二端位于力传感器(103)凹槽内,其劲度系数为K2,预压紧力为F2,力传感器(103)为中空型。
通过螺栓预压紧在导向轴固定座(104)上,压紧力为F1。支撑弹簧(108)的第一端位于突出件(1021)的下部凹槽内,第二端位于支撑座(104)的凹槽内,其劲度系数为K3,预压紧力为F3。

图10 本发明和实用 新型扫盘主视图

图11 本发明和实用新型扫 盘的稳定机构示意图
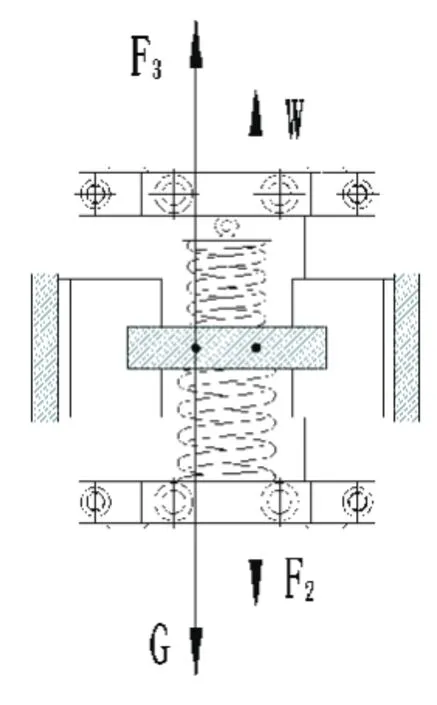
图12 本发明和实用新型浮动 板突出件受力示意图
图12所示,以浮动板突出件(1021)为对象进行受力分析,其中G是扫盘组件重力;F2为受到的阻尼弹簧的压力,方向向下;F3为受到支撑弹簧压力,方向向上;W为扫盘工作时的接地压力,方向向上。
在阻尼弹簧和支撑弹簧共同作用下,浮动板处于平衡状态:G + F2 = F3 + W,阻尼弹簧可以消除扫盘组件在垂直方向的跳动,同时也能保护力传感器不受冲击。此时力传感器的压力大小为F1 + F2。
当扫盘扫刷磨损一定值时,接地压力减小,扫盘高度下降ΔX,支撑弹簧的支撑力为F′3=F3+ΔX×K3,阻尼弹簧的压力为F′2=F2-ΔX×K2,浮动板重新处于平衡状态:G+F′2=F′3W′,接地压力变化量为 W-W′=ΔX×(K2+K3),此时力传感器检测到压力大小为F1+F2-ΔX×K2,控制系统检测到力传感器变化量-ΔX×K2后,控制油缸的电磁阀得到动作信号,油缸杆收回,扫盘下落,接地压力逐渐增大,系统根据一定时间内力传感器测得的平均值跟系统设定值做对比,直到接地压力保持在指定值W,油缸停止动作,并锁定缸杆。
当地面高度突然增大时,接地压力W′增大,阻尼弹簧(107)压缩,力传感器数值增大,控制系统向电磁阀发送信号,控制油缸杆伸长,扫盘离地高度增大,当接地压力逐渐回落至指定值W,油缸停止动作,并锁定缸杆。
扫盘工作过程中,在坑洼路面上振动、弹跳,容易对力传感器的测量值造成影响,为了提高系统稳定性,防止油缸缸杆频繁动作增加能耗,该结构采用以下方法提高系统稳定性:
一是控制系统取一个时间段内测得的力传感器平均值作为有效值,用来和系统设定值做对比;
二是设定传感器有效阀值F,当力传感器测得的一个时间段内的平均值在F1+F2 ±ΔF范围内时,油缸不动作,超过该范围则油缸做出相应的动作。以上方法可有效消除振动、弹跳等不利因素对稳定接地压力的的影响。
该结构通过在气缸与转动座之间增加连杆机构,使得扫盘组件在避让障碍物时的力完全作用到连杆上,该机构保护了气缸及其气路组件免受冲击。
扫盘组件可以沿导向轴滑动,扫刷接地压力大小通过力传感器测得,通过控制油缸行程来调整接地压力大小。该结构误差小,实时性好,能够自动维持扫盘接地压力的恒定。
结语
通过分析清扫车工作过程扫盘受力状况及实际使用中存在的问题,设计该可自动调整扫盘机构。
该结构巧妙的连杆机构可以保护气缸及组件免受硬性冲击,延长气缸及组件的使用寿命。力传感器能实时检测扫刷接地压力大小,控制系统实时调整扫刷接地压力,在对接地压力的控制上比现有技术更稳定,可靠性更高,工作时的清扫效果更好。
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
材料研究与应用(2022年4期)2022-09-01
汽车零部件(2022年5期)2022-05-30
军民两用技术与产品(2021年6期)2021-10-14
科学与财富(2021年35期)2021-05-10
宇航材料工艺(2020年6期)2021-01-28
科技创新与品牌(2017年9期)2017-10-20
集装箱化(2016年8期)2016-10-20
建筑工程技术与设计(2015年29期)2015-10-21
