蓄电池充电电流自动控制的建模与校正
2019-11-07 05:44郑宇恒
科技与创新 2019年20期
郑宇恒
蓄电池充电电流自动控制的建模与校正
郑宇恒
(武汉理工大学 机电工程学院,湖北 武汉 430070)
为研究科学合理的蓄电池充电电流自动控制装置,在前人的研究基础上建立并简化了蓄电池充电的数学模型,并对多种模型进行对比分析,最终计算出该系统的开环和闭环传递函数,同时将该系统的传递函数导入MATLAB中进行仿真分析,最终确立了利用PID自动控制充电电流系统的各项调节参数,并对此次工作进行总结。
MATLAB仿真;PID调节;蓄电充电系统;控制系统
1 选题背景及意义
随着电动车、电动汽车使用量的增加,其动力电池的充电问题逐渐引起人们的重视,蓄电池的充电方式有很多,如恒压充电、恒流充电等,但由于恒压充电在充电初期的电流较大会造成电池极化,而恒流充电由于长时间大电流充电会影响电池的使用寿命。同时由于恒压和恒流充电时会使电池的温度升高,电流过大将会使电池的发热量增加,当电池充电时的温度超过其最适温度将会缩短电池的使用寿命。
针对以上问题,设计出一种科学的充电方式,该方式对延长电池的使用寿命至关重要。本文提出了基于PID控制策略的充电方式,用此方式对蓄电池进行充电研究。采集蓄电池端口电压,得到端口电压的误差和误差变化率,以此作为PID控制器的输入,通过调整PID的比例、积分、微分系统这三个参数,实现对输出结果的智能调节,再经过清晰处理给控制对蓄电池的充电,采用PID控制技术,运用专家知识库、操作者的经验、其他可靠的数据建立控制规则。充电电流会根据充电电压的变化而调整,因此降低了蓄电池的极化电压和内阻,在充电过程中蓄电池温度明显下降。因此,根据所学到的专业课程知识,建立电池充电时的数学模型,并利用Matlab软件对所建立的数学模型进行仿真分析,通过PID控制技术,对充电时的电流进行科学合理地调控,避免电池在充电过程中的过度发热,达到延长蓄电池的使用寿命的效果。
2 蓄电池充电模型建立与分析
根据查阅的文献可知,蓄电池的充放电等效模型如图1所示。
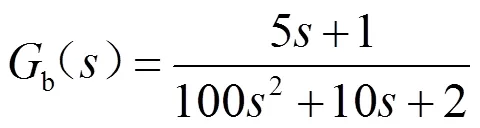
图1中支路(1)为充放电的可逆反应过程。支路(2)为不可逆过程。在充电初期支路(1)的电流m>>a,充电后期m< 由物理模型可以看出,电池系统只有一个独立的储能单元r,因此是一个一阶系统。但是本文主要研究的是对蓄电池充电时电流的控制,因此,为简化模型,可将上述模型的放电支路去除(只考虑刚开始充电阶段的充电电流,认为m>>a)。根据该回路,利用基尔霍夫电压定律可列出方程。由于电流测量较难,因此通过测量电阻0两端电压来控制输入电流,以0()为系统的输出,ab()为系统的输入,则通过联立方程可以计算出如下关系,化成标准形式后,经拉式变换后可得出以下关系式: 模型再次得到简化。该模型虽然经过简化后可基本反映电池的充电过程,但其未能完全模拟电池充电器的充电过程,因此经查阅资料后发现实际电池充电器模型应如下。 对于RLC电路,可将RLC统一用阻抗来表示,根据基尔霍夫电压定律可得等式,并可得到该电路的开环传递函数,经过以上分析,最终建立了本文所需要用到的蓄电池充电数学模型的传递函数: 查阅文献分析确定:=5 mΩ,=100 mH,=1 000 F。 闭环系统方框如图2所示。以=5 mΩ,=100 mH,=1 000 F为已知条件,系统的传递函数为: 由图2可知,该系统的闭环系统传递函数为: 该系统的开环系统传递函数为: 编写程序如下: >> num=[5 1];>> den=[100 5 1];>> sys=tf(num,den);>> margin(sys) 将所求得传递函数导入Matlab软件,通过输入以下程序,利用Matlab软件便可以直接作出该系统开环传递函数bode图。 通过系统的伯德图以及奈奎斯特图可看出,所有极点均位于左半复平面中,幅值裕度=70.5°,穿越频率为141 rad/s;相位裕度无穷大。 将所求得传递函数导入Matlab软件,输入程序如下: >> num=[5 1];>> den=[100 5 1];>> sys=tf(num,den);%绘制单位阶跃响应>> step(sys); >>xlabel('t'); %设置横坐标>>ylabel('y(t)'); %设置纵坐标>>title('单位阶跃响应曲线'); %设置标题>>grid on;%显示网格线 利用Matlab软件便可直接做出该传递函数的单位阶跃响应曲线。 由上可看出该响应曲线的最大超调量较大且调整时间较长,不符合系统快速性和稳定性的原则,利用matlab中pid调节对该响应曲线调节。 pid调节传递函数如图3所示。 图3 pid调节传递函数 此时系统的闭环传递函数为: 将函数(1)通过以下程序输入至matlab中,通过对matlab中输出图形的不断调整,最后确定p,i,d三个参数分别为:p= 25,i=0.01,d=0.4。 输入程序如下: >> Kp=25;>> Kd=0.01;>> Ki=0.4;>> num=[5*Kd 5*Kp+ Kd Kp+5*Ki Ki]; >> den=[100+5*Kd 5+5*Kp+Kd Kp+1+5*Ki Ki];>> sys= tf(num,den);>> step(sys); %绘制单位阶跃响应>>xlabel('t'); %设置横坐标>>ylabel('y(t)'); %设置纵坐标>>title('单位阶跃响应曲线'); %设置标题>>grid on;%显示网格线 由调整后的阶跃响应曲线可以看出,该系统的上升时间为2 s,峰值时间为3 s,最大超调量约6%,稳态误差约为2%,和未调节的系统相比,系统的上升峰值大大降低,动态稳定性有了明显的提高,同时动态调节性能损失也不大,爬升能力较好,各项指标对于电池充电来说基本处于允许范围内,达到了综合性能指标优化的目的,达到了预期效果。 本文对蓄电池充电电流自动控制模型进行了建模与校正进行了分析,通过建立并简化蓄电池充电的数学模型,求得该系统的传递函数,并将所求得系统的传递函数导入MatLab软件中进行单位阶跃响应曲线的分析,建立pid校正系统进行快速分析及校正,得到了较好的设计结果。 但在本次模型建立的过程中还存在许多问题需要解决,该模型的建立是在理想的情况下,如外界有干扰因素的产生将会影响系统的稳定性,在接下来的工作中应该对该系统进行完善,将实际的干扰因素加入系统中再进行仿真,使系统更加贴近实际工作状况,对现实系统的指导意义更大。 [1]彭金春,陈全世,韩曾晋.电动汽车铅酸电池充放电过程建模[J].汽车技术,1997(6):5-8. [2]王静,康龙云,李鹰.基于模糊自适应PID控制的铅酸蓄电池充电系统仿真[J].低压电器,2012(2):31-34. [3]刘洋,裴洲奇.Simulink仿真技术在自动控制原理中的应用[J].数字技术与应用,2014(7):17. [4]王凤娇.MATLAB语言在自动控制系统校正装置设计中的应用[D].长春:吉林大学,2007. TM912 A 10.15913/j.cnki.kjycx.2019.20.018 2095-6835(2019)20-0043-02 〔编辑:严丽琴〕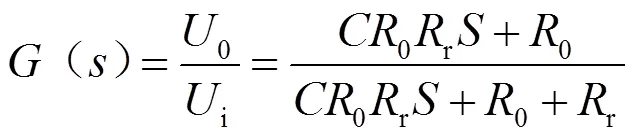

3 控制系统性能分析



4 总结与体会
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
宁夏电力(2022年1期)2022-04-29
中国科技纵横(2021年22期)2022-01-08
人民长江(2021年9期)2021-10-18
汽车维修与保养(2021年11期)2021-03-11
科技视界(2020年26期)2020-09-24
佛山陶瓷(2017年8期)2017-09-06
演艺科技(2017年1期)2017-03-09
中文信息(2016年7期)2016-05-14