应用遥测数据的地球同步轨道卫星热变形分析
2019-11-09 06:19王海强吕红剑李新刚裴胜伟
航天器工程 2019年5期
王海强 吕红剑 李新刚 裴胜伟
(中国空间技术研究院通信卫星事业部,北京 100094)
随着科学技术的发展,人们对卫星应用的需求越来越高,对卫星姿态指向精度的要求也越来越高。以通信卫星为例,维持工作载荷(通常是天线等通信载荷)恒定的对地指向是卫星姿态控制的核心任务,而姿态控制的前提是利用各种姿态敏感器完成姿态测量与确定。星敏感器利用恒星星光确定姿态,具有精度高、寿命长等优点,因而目前包括通信卫星、遥感卫星、电子侦察卫星在内的大量地球同步轨道卫星均应用星敏定姿,而后通过执行机构实现三轴稳定对地指向控制。
鉴于在轨热环境的复杂性,卫星星体结构在轨难免会出现热变形[1]。热变形会导致从星敏感器到工作载荷的传力路径发生变化,即使整星姿态测量与控制均稳定也会导致工作载荷指向偏离预期,由此形成了在轨热变形引起卫星对地指向偏差的问题[2]。
由于难以精确地获取卫星在轨热环境,对星体热变形问题造成的影响做精确分析比较困难。随着高分辨率遥感、高通量通信卫星对姿态指向精度的要求越来越高,卫星在轨热变形引起的指向偏差问题逐渐凸显。研究人员尝试用多种方式解决该问题以提高载荷对地指向精度,如通过应用新材料或通过优化结构,控制载荷天线自身的网面热变形[3-4];通过设计钛合金蜂窝夹层结构,减小星敏感器支架的热变形[5];遥感/SAR卫星通常采用将星敏感器直接安装在相机/天线框架上的方式[6]来回避传力路径的热变形,并采用半刚性、柔性连接隔离技术[7]来减小星体热变形对载荷的影响。这些研究大多关注星上单机的热变形补偿,对整星星体传力路径的变形较少涉及,然而由于整星结构在设计时更多的考虑刚强度问题,对星体热变形问题通常不做优化,卫星星体热变形某种程度上是不可避免的。
从任务角度来说,即使存在星体热变形,只要能保证载荷准确的指向地面目标即可。如果可以通过地面信标或其他方式对载荷指向进行校正,对热变形进行标校控制[8-10],则可以避开星体热变形问题。但实际应用中,信标的实时标校受到限制,通常只能每隔几天标校一次,甚至入轨后仅在前期进行一次标校。星体热变形却是随时间实时变化的,完全靠信标标校难以解决星体热变形问题。
本文主要研究基于星敏感器定姿的GEO通信卫星热变形问题,并用到了地球敏感器的遥测数据,地球敏感器可以指示卫星对地指向的偏差,在本文中可视作对地指向载荷。基于对两者的分析建立星体热变形的数学模型,并通过分析真实遥测数据对
热变形参数进行拟合估计,进而探讨了对星体热变形的补偿方法。
1 在轨星体热变形问题的建模
基于星敏定姿的卫星因星体热变形引起的指向误差示意见图1,星敏感器安装在卫星一侧,地球敏感器(载荷)安装在对地板上,卫星在地面温度环境下初始状态见图1(a),地球敏感器与星敏感器间夹角恒定;卫星入轨后,因空间环境因素产生星体热变形,进入图1(b)所示状态,敏感器之间夹角产生变化,控制回路以星敏感器为基准进行姿控调整至图1(c)所示状态,进一步影响地球敏感器(载荷)指向。本文假定卫星控制系统工作正常,星敏感器指向正确的天球方向,地球敏感器代表对地载荷,直接输出滚动俯仰角指示卫星对地指向姿态,其滚动俯仰角的变化量即表征了星体热变形造成的影响。
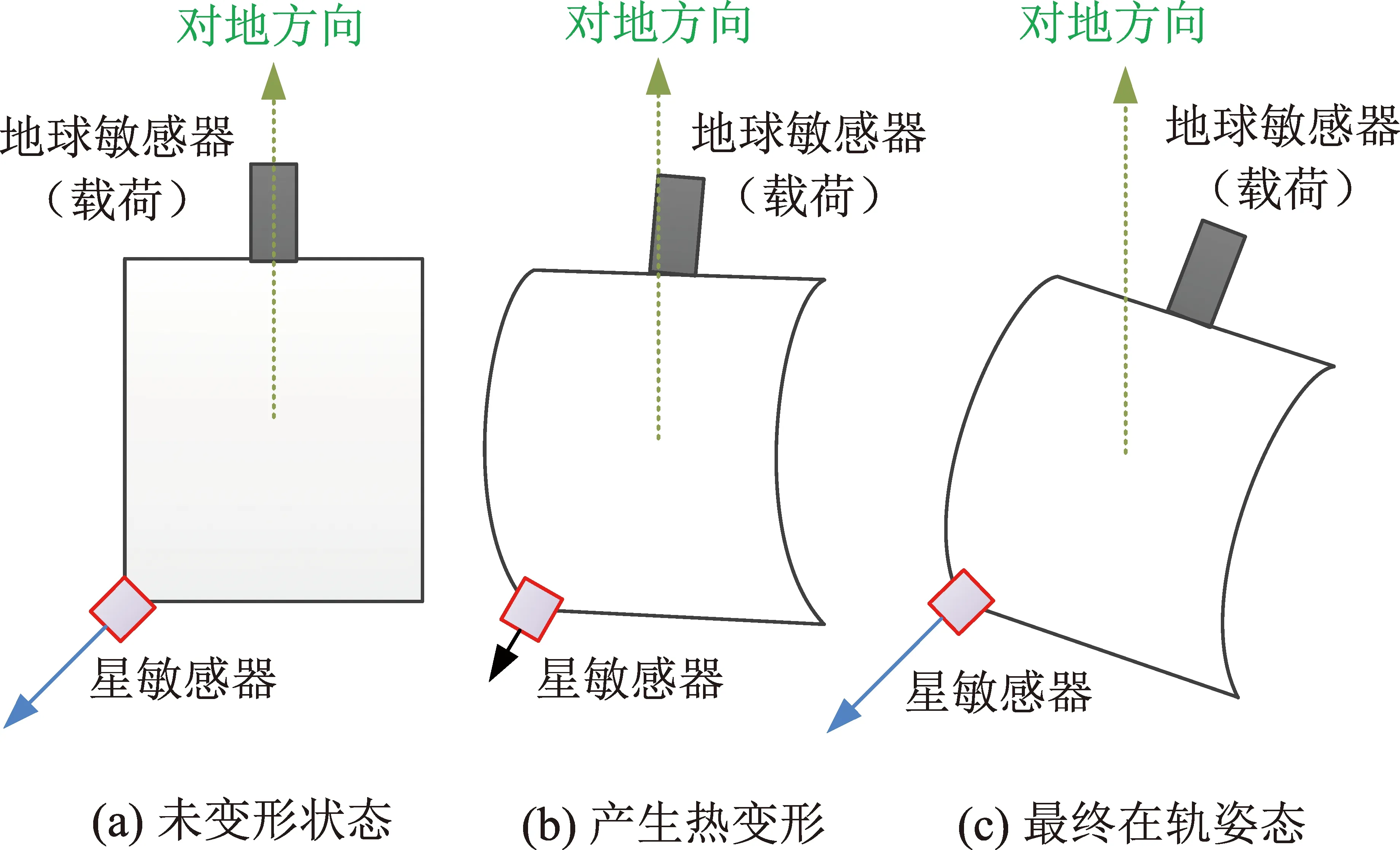
图1 卫星在轨星体热变形对载荷的指向误差影响示意图Fig.1 Influence of body-thermal-deformation for pointing accuracy of paylaod
空间热环境变化(主要为太阳光照射)是造成星体热变形的主要原因,据此,认为星体热变形具有周期性:①日周期性,地球自转,导致卫星受太阳直射的面以天(24 h)为周期变动;②年周期性,地球绕太阳公转,且黄道面与赤道面不重合,导致卫星南/北板周期性受太阳照射(根据闰年计算方式,年周期取为365.25 d)。
由于卫星结构的复杂性,无论是日波动还是年波动,热变形引起的变化量都是非线性的,但可以采用傅里叶级数[11]对周期项进行拟合。据此,建立星体热变形的数学模型:
(1)
式中:F(t)为热变形引起的指向角度偏差,在本文中即为地球敏感器俯仰角/滚动角的数值(滚动/俯仰使用同样的公式,仅系数不同);t为计算热变形的时刻(文中t的单位为h,起始时刻选取为UTC时间当年的1月1日0时);m,n为傅里叶级数建模取的阶次;i,j均为下标(i=1,2,…,m;j=1,2,…,n),分别指示第i阶日周期项和第j阶日周期项;Pd(t)为热变形日周期项引起的偏差;w1为日周期项的频率;φi(t)为日周期项的各阶级数相位;Ai(t)为日周期项的各阶级数幅值;Py(t)为热变形年周期项引起的偏差;w2为年周期项的频率;θj(t)为年周期项的各阶级数相位;Bj(t)为年周期项的各阶级数幅值;η(t)为非周期性偏差,其中ε(t)代表常值与趋势偏差,该项主要来源是卫星发射时的振动及在轨热环境与地面差异所导致的恒定偏差;δ(t)为敏感器采集的电噪声,可近似认为是白噪声;ν(t)为因建模阶次m,n的选择而产生的截断残差及其他未知因素导致的误差;η(t)为非周期项,因而难以用傅里叶级数的方法进行辨识,后文在分析周期项时将对其进行讨论。
考虑到卫星真实在轨情况,认为系数Ai,φi,Bj,θj均非恒值,但相对于日周期项和年周期项来说是缓变量,仅在一个稳定值基础上小范围波动。
根据傅里叶级数理论,上述模型中日周期项、年周期项各阶级数相互正交,再考虑到Ai,φi,Bj,θj的缓变性,在一段时间内可将其视作常值进行建模,并利用同频率正弦函数求解系数,这里采用基于最小二乘的矩阵计算方法[12],辨识Ai,φi,Bj,θj,具体如下:
假定已获得k个时刻tk的热变形值F(tk)(这里k∈N,为所获得的一段时间内热变形的离散数据个数),则记
(2)
对于第i阶日周期项系数,定义未知量c1i,c2i并构造第i阶日周期项级数矩阵
(3)
(4)
必有
(5)
2 数据分析与讨论
将缓变量Ai,φi,Bj,θj视作常值进行估计是本文的前提,本章首先基于一颗GEO通信卫星(卫星S)的在轨真实遥测数据进行分析并讨论各参数的一致性,验证前提假设的合理性。选取的数据均为卫星S正常运行时刻(姿态保持对地指向,无位保干扰)的遥测,可以认为在这些时刻星上姿态控制稳定,星敏感器指向正确,卫星的名义本体坐标系与东南系重合,地球敏感器的滚动角、俯仰角度偏差即来自从星敏感器到地球敏感器的传力路径的星体热变形。
2.1 日周期项分析
卫星S在2018年某天(记为λ日)起共3天的地球敏感器俯仰角、滚动角数据如图2所示,可以看到明显的周期性。假定这3天中的每一天内Ai,φi为常值,同时鉴于年周期项缓变,不妨假定这3天内年周期项和其他误差的影响可以用一阶趋势项来描述。利用线性回归去除一阶趋势项后按上述公式辨识周期项系数Ai,φi,得到的结果如表1和图3所示(计算了4阶级数)。
可以看到,这3天中每一天的周期项系数,尤其是低阶系数的一致性很好。利用日周期项系数拟合出的曲线如图4所示,曲线吻合度较好,由此表明,短时间(3天)内星体热变形的日周期项具有强规律性,本文中将缓变量假定为常值是合理的。
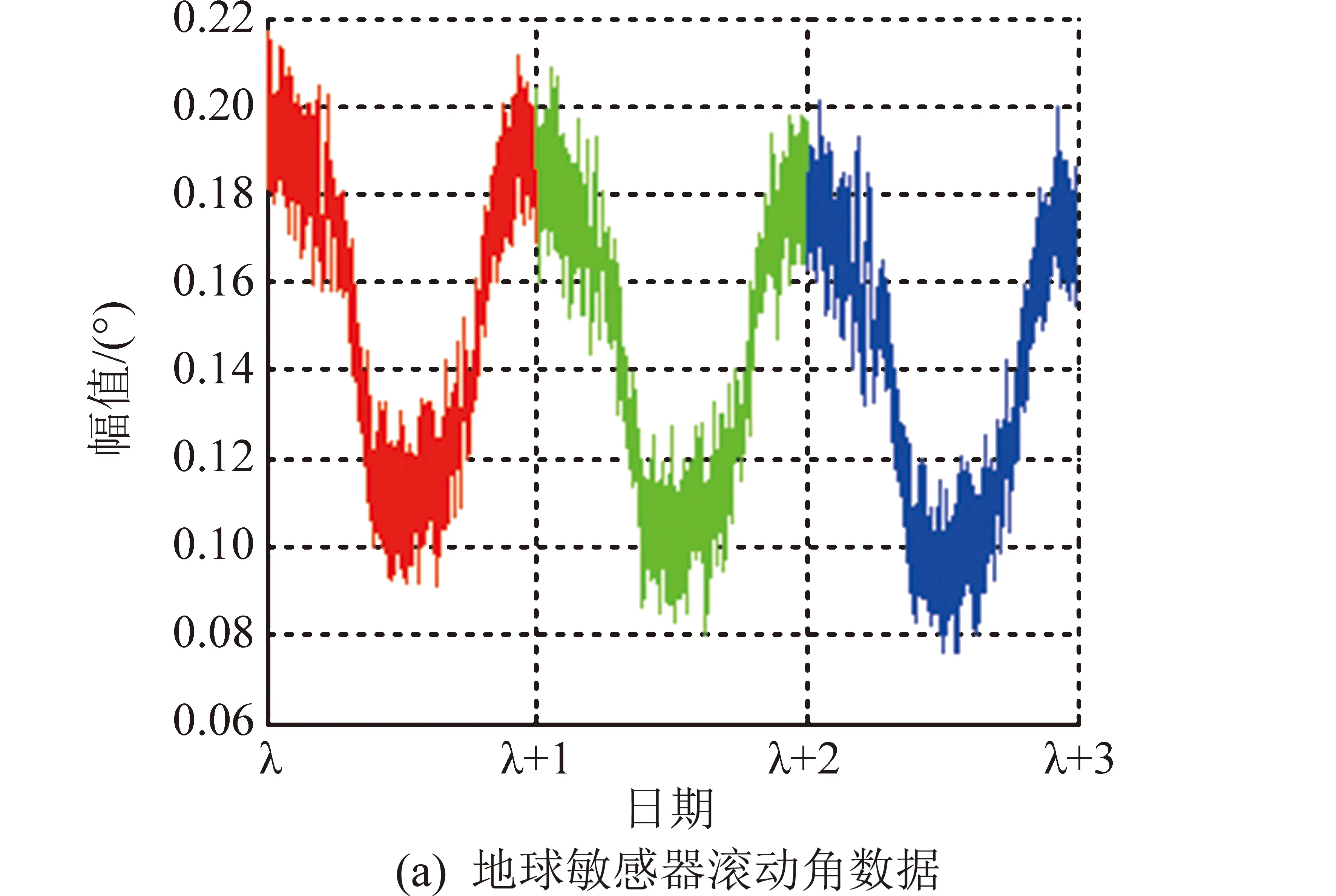

图2 地球敏感器滚动、俯仰角遥测曲线(λ日~λ+2日)

阶次λ日λ+1日λ+2日A/(°)φ/radA/(°)φ/radA/(°)φ/rad滚动角1阶4.349×10-2-1.232×10-14.239×10-2-1.178×10-14.182×10-2-1.190×10-12阶5.722×10-31.9714.764×10-31.9644.707×10-32.0213阶8.073×10-31.7227.461×10-31.7397.492×10-31.7084阶1.176×10-3-1.2231.197×10-3-1.2551.201×10-3-1.230俯动角1阶4.934×10-22.945 4.763×10-22.941 4.814×10-22.946 2阶1.096×10-2-8.658×10-11.083×10-2-8.452×10-11.020×10-2-8.833×10-13阶1.125×10-2-1.3801.132×10-2-1.3931.148×10-2-1.3754阶2.245×10-32.518×10-12.319×10-33.002×10-12.458×10-34.916×10-1

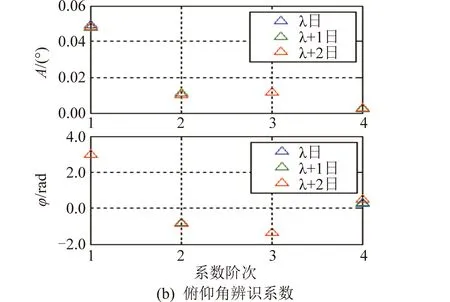
图3 卫星S的λ~λ+2日的地球敏感器数据参数辨识结果


图4 去除趋势项后地球敏感器滚动俯仰角的系数拟合曲线
在2018年共选取了25组数据,每组均为连续的3天,利用上文方法进行建模和辨识,计算每段数据的一阶傅里叶系数均值及标准差,得到结果见图5,从图5中可知,每段数据的标准差比均值小一个量级,辨识系数具有较好的一致性,由此说明本文中日周期项建模的正确性。图5还显示了这25组数据在一年内的系数A1,φ1变化趋势,可知一年中各个时段的幅值相位系数趋同,趋同基础上的小幅波动则无明显的简单函数规律。
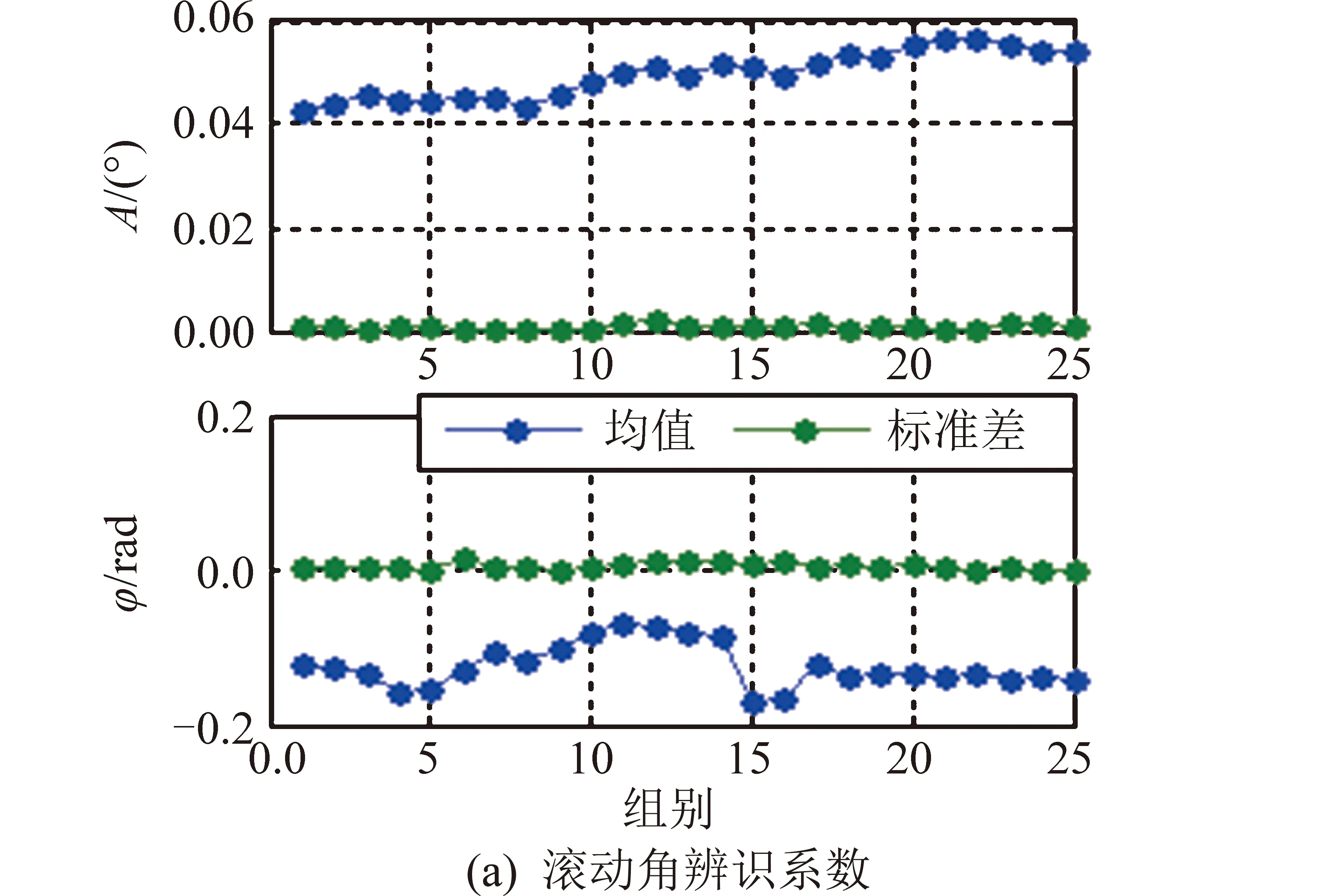

图5 日周期项的级数系数(一阶)在一年内的变化趋势Fig.5 Movement of fourier series coefficients of day-periods (1st step) during whole year
根据以上分析可以得出结论:①星体热变形造成的地球敏感器滚动、俯仰角偏差存在明显的日周期性,且存在非线性。连续3天的角度波动日周期项幅值、相位均具有较好的重复性,系数具有缓变性;②从全年来看,星体热变形造成的地球敏感器滚动角、俯仰角偏差日周期项各阶系数在不同的月份趋同,但随时间变化存在小幅波动,波动无明显规律性。
一阶趋势项中包含各种残差和未知影响,因而系数波动程度较大,本身规律性不明显。
为了进行各年数据的对比,分别选取卫星S在2017年、2018年的γ日和κ日起连续3天在轨数据,画出地球敏感器滚动俯仰角曲线如图6、图7所示。由图可知,曲线吻合度很高,说明日周期项在不同年份同一天的重复性好;这反过来印证了星体热变形主要受光照影响的假设。γ日和κ日起3天内幅值相位系数均值如图8所示,系数具有较好的重复性。

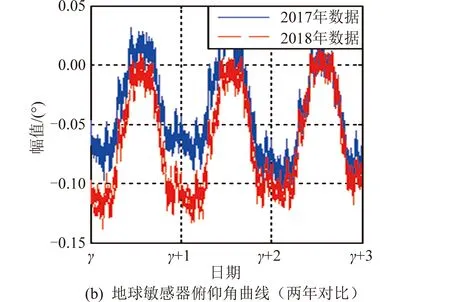
图6 不同年份的滚动、俯仰角对比 (2017年γ日与2018年γ日)
2.2 年周期项分析
如前所述,星体热变形还包含年周期项,由于一整年数据量较大,且卫星会定期进行轨位调整,地球敏感器数据并非始终稳定。选取另一颗GEO卫星(卫星Q)近3年共计78组稳定时段的地球敏感器数据(卫星S在轨时间不足以分析年周期项),进行年周期项分析。
用原始数据减去日周期项系数拟合曲线后得到的数据画出地球敏感器滚动角、俯仰角波动曲线如图9所示,年周期项包含在其中。可以看出,滚动角的年周期波动在这3年中有明显的一致性,俯仰角本身波动较小,一致性不够明显,傅里叶分析得到的一阶系数结果见图10。
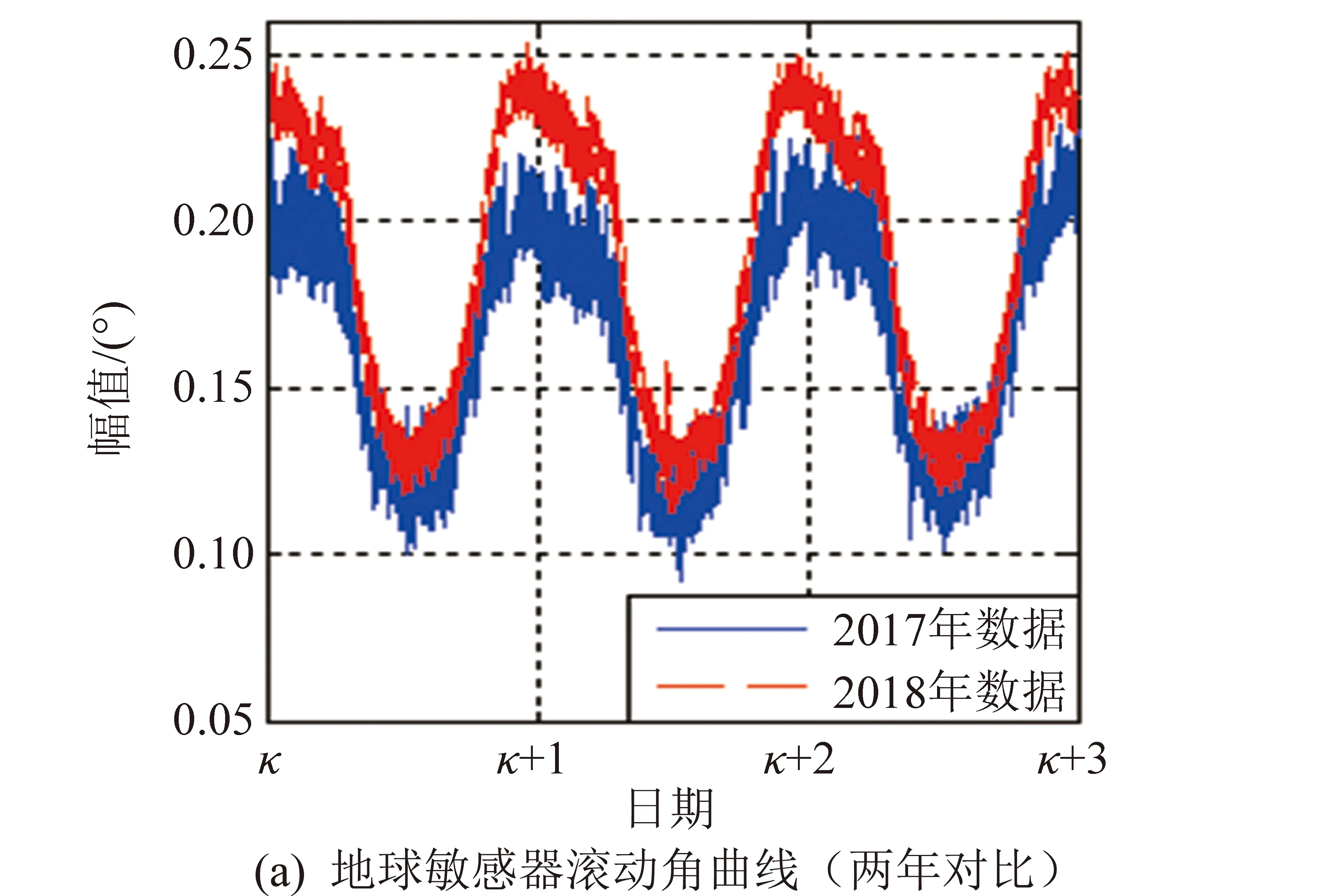

图7 不同年份的滚动俯仰角对比
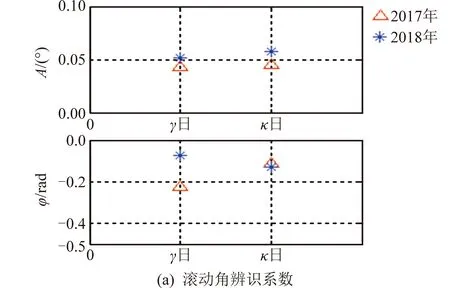
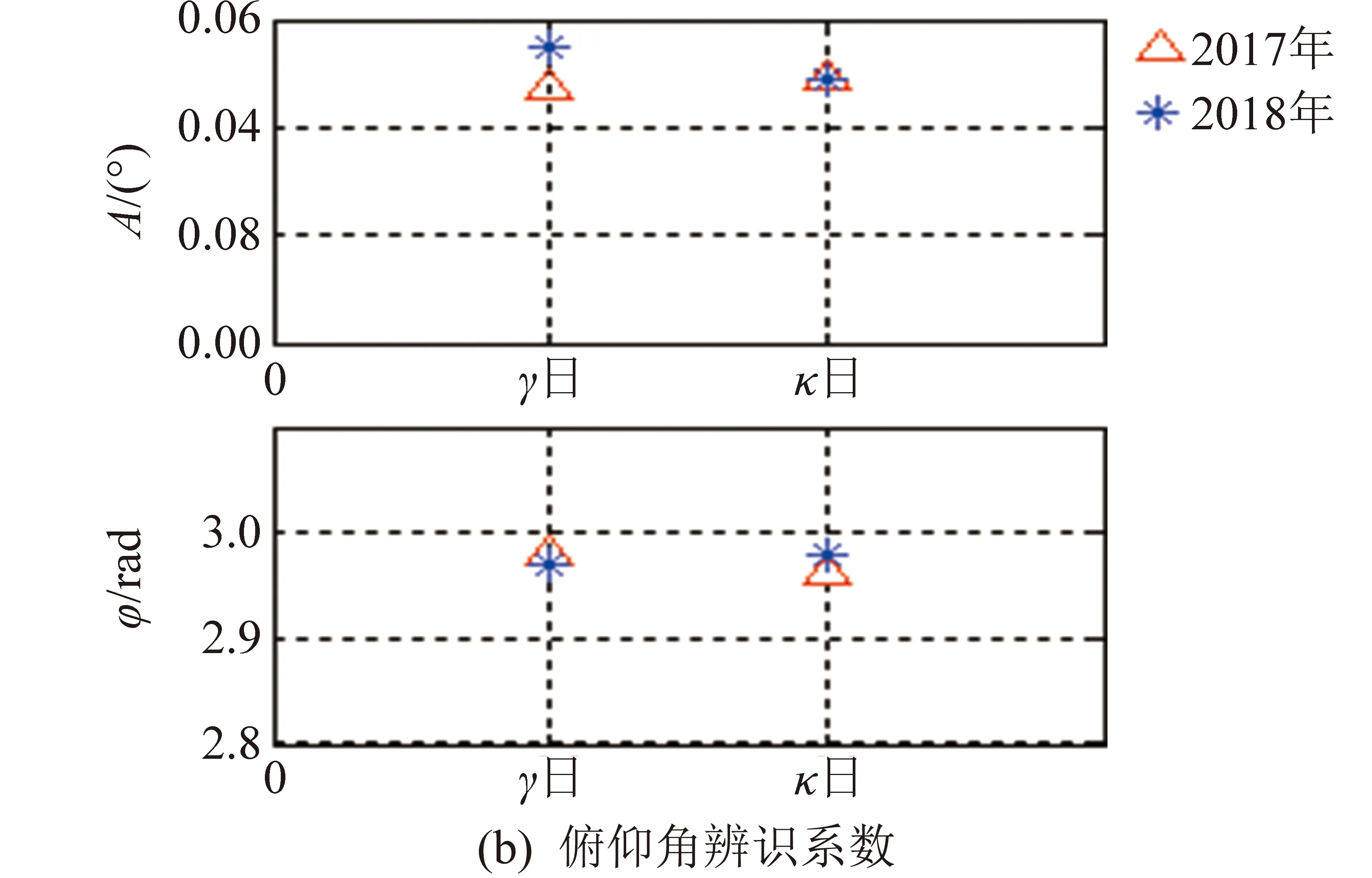
图8 不同年份的日周期项系数对比(一阶系数的3天平均)


图9 近3年的地敏感器滚动俯仰角去除日周期项后曲线Fig.9 Contrast of ES’ data after removing day-periods part in recent 3 years

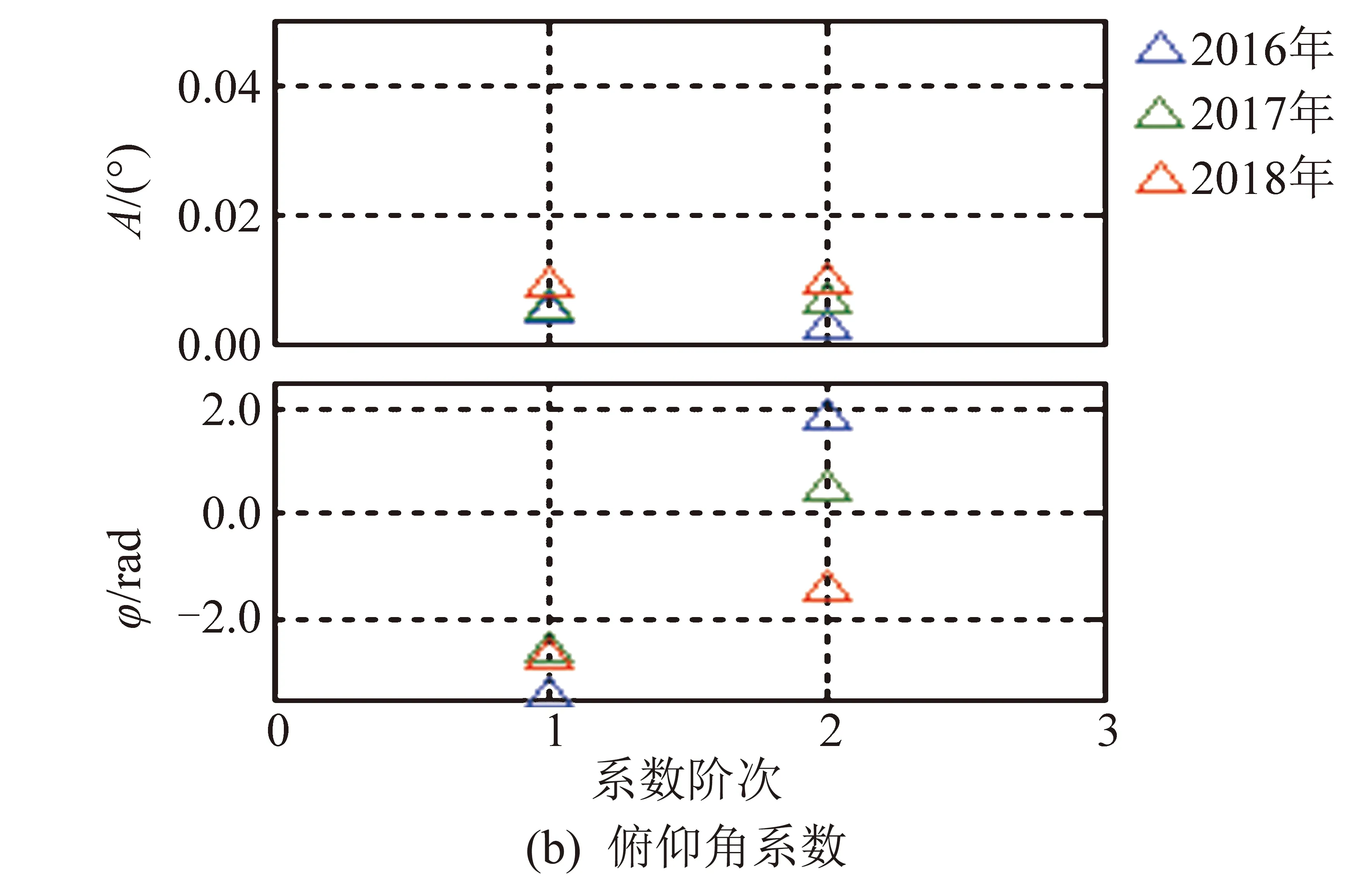
图10 年周期项数据的傅里叶分析结果(取前2阶)Fig.10 Fourier series coefficients of year-periods in 3 years (1st & 2nd steps)
由图10可知,卫星各年的年周期项系数存在一致性,但数据建模准确性比日周期项差。相比于日周期项Pd(t),年周期项Py(t)时间跨度大,且与非周期项η(t)难以分离,因而建模得到的一阶系数置信度较低(高阶系数波动更大,已无应用价值)。此外,卫星Q可用数据仅有3年,年周期项数据样本仍不充分,进一步影响了建模置信度;年周期项本身受到更多诸如轨道、卫星退化、空间辐照等因素干扰,也是不同年份建模结果存在差别的重要原因。
2.3 星体热变形补偿方法探讨
基于上文结论,可以利用卫星的往年历史数据对当前年份的星体热变形进行估计,进而进行闭环控制调整姿态,对星体热变形造成的指向偏差进行补偿。利用卫星S在2018年3月的两组数据辨识系数插值,去补偿2019年3月ρ日的地敏波动偏差,得到的结果如图11所示。
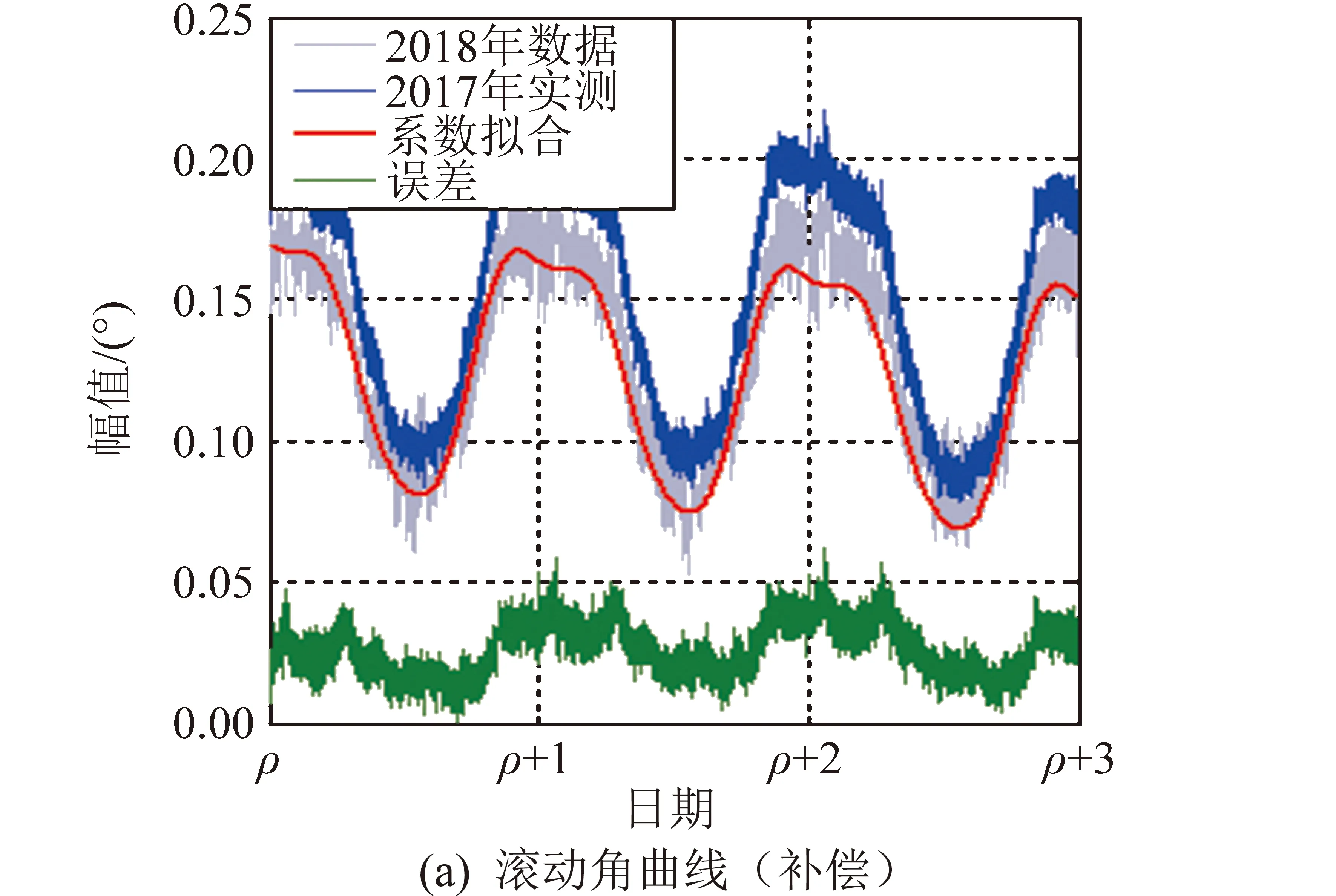

图11 2018年数据拟合曲线与2019年实测曲线对比
由图11可知,利用2018年数据进行2019年地敏波动的估计,得到的曲线与2019年实际在轨遥测吻合很好。利用估计数据进行补偿仿真,从误差数据上看,日周期项滚动角峰峰值从0.105°下降到0.022°,俯仰角峰峰值从0.094°下降到0.019°,降幅达80%;对其他时间段进行补偿仿真,得到的效果类似;对于年周期项,利用往年数据进行补偿后,滚动角残差从0.16°下降至0.027°,俯仰角残差从0.069°下降到0.006°,降幅达80%,但对其他时间段的仿真表明对年周期项的补偿效果波动较大,最大残差可达0.05°(滚动角)。
该方法利用往年历史数据进行在轨补偿,适用于卫星入轨后标校机会较少的应用场景。考虑到年周期项短时间内近似常值,可以利用近期数据进一步提升误差补偿的效果,如在上例中利用2019年3月初的数据对当前时刻进行补偿,从而更好的消除年周期项波动。
3 结束语
本文研究了GEO卫星的星体热变形问题,基于傅里叶级数将热变形建模为日周期项与年周期项,并基于辨识分析结果利用真实遥测数据进行了对星体热变形的补偿仿真。仿真结果表明,热变形日周期项得到了很好的补偿,对卫星指向精度的影响下降了80%,年周期项补偿效果某些时刻同样达到80%,但总体上不如日周期项。对日周期项系数的辨识准确性高,年周期项系数的辨识准确度由于可分析数据量少而不如日周期项,如果引入近期数据,可以更好地消除年周期项对姿态的影响。
本文的建模和补偿方法对标校实时性要求低,可以与星地信标标校方法结合,提高卫星在轨指向精度。对于热设计已无法改进的在轨GEO卫星具有良好的应用价值,对改进未来GEO卫星热设计和姿态控制方式亦具有一定的参考价值。
猜你喜欢
商界评论(2022年1期)2022-04-13
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
金山(2021年3期)2021-03-24
学生天地(2020年6期)2020-08-25
科技风(2019年30期)2019-11-10
数学大王·趣味逻辑(2019年10期)2019-11-06
小学科学(2019年9期)2019-10-18
福建基础教育研究(2019年6期)2019-05-28
草原(2018年2期)2018-03-02
小猕猴智力画刊(2016年9期)2016-05-14