
看天线,识卫星
——漫谈卫星天线(五):深空探测器的“大锅”及其测控网(上)
2019-11-15 06:11袁东
卫星与网络 2019年7期
袁东

深空探测器,一旦踏上漫漫星际征途,就一去不返,渐行渐远,飞得最远的旅行者1号探测器距离地球已经有144个地日距离(AU,1个地日距离约1.5亿公里)。然而,依靠特殊的天线技术,地球至今仍能够和这些无畏的使者保持联系。请看本期——深空探测器的“大锅”及其测控网(上)。
“……小时候我一直有个梦/有一天我要飞上外太空/就像夏夜繁星闪烁……”五月天演绎这首《小时候》表达了人类一直渴望摆脱地球摇篮奔向外太空的梦想。戏剧性的是,上世纪50年代中后期在冷战铁幕的阴影之下,苏联于1957年10月4日发射了人类第一颗卫星,宣布了美苏两个超级大国太空竞赛的开始,从而加速了这个梦想的实现。
美苏两国互不相让,均试图拿下更多的“第一次”。从图1的表中可以看出,人造地球卫星发射后不到1年时间里,他们就争相迈出了各类太空探索的第一步,步伐和手笔之大令人感慨。
好比是蹒跚学步的婴儿就试图飞奔,这些初次尝试的结果,大多告以失败。据统计,从1958年~1965年,美苏两个大国发射的66个深空探测器,成功的仅有11个。失败的原因,包含多次运载火箭的故障,但也有不少是因为深空探测特性增加的难度。我们先分享一下苏联在深空探测起步阶段的一些故事。

图1 1958年~1965年的10个“首次”探测项目
一、深空探测的先驱——苏联的月神(LUNA)计划
科罗廖夫和他的同事在1956年即开始讨论探月任务的设想,1958年1月苏联著名的科学家马斯蒂斯拉夫·克尔德什(MstislavKeldysh)给科罗廖夫写信,提出了探测器撞击月球并拍摄图像传输到地球的设想,在两人的说服下,苏联政府于1958年3月20日对探月项目予以立项。(参见图2)
(一)差之毫厘,谬之千里的苏联Luna1探月尝试
探月的难度可想而知,苏联的初次尝试选择了撞月,因为万一没射中,变成绕月、环月飞行,这也算是“首次”。为了达到11千米/秒的逃逸速度,R-7火箭加装Block-E第三级,Block-E干重1.12吨,在一对环形罐中贮存7吨煤油和液氧驱动RD-0105火箭发动机。从洲际弹道导弹衍生而来的R-7可以使用自主惯性制导系统飞行,虽然开发了更精确的制导和控制系统,但其精度仅为10公里左右。通过使用拜科努尔发射场两侧250公里处的一对无线电测控站组成地面无线电三边测量和制导系统,测距精度提高到2公里,测角精确达到1/12度,结合使用多普勒频移分析技术测速精确达到2米/秒。这种精确度对于太空探测任务至关重要!(参见图3)
撞月的探测器主体为一个直径80厘米的球形舱,由铝镁合金制成,重170千克,由银锌和氧化汞电池供电。和Sputnik-1卫星一样,两个半球形部分用螺栓和橡胶垫圈连接,充1.3个大气压的氮气。(参见图4)
科学舱带了一些苏联国旗等纪念品,还包含了一对由五角形奖章和苏联徽章组成的不锈钢球体(直径7.5和12厘米),球体内还装了炸药,在撞击时爆裂并把徽章洒向月球!不过3.3千米/秒的撞月速度,炸药明显多余,而且纪念品应该都汽化了。(参见图5)

图2 科罗廖夫和克尔德什都是功勋卓著的苏联科学院院士
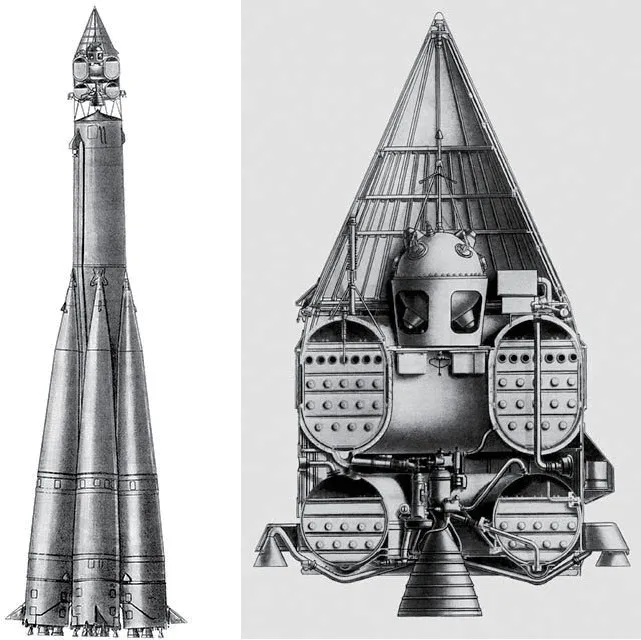
图3 增加了第三级的R7火箭,
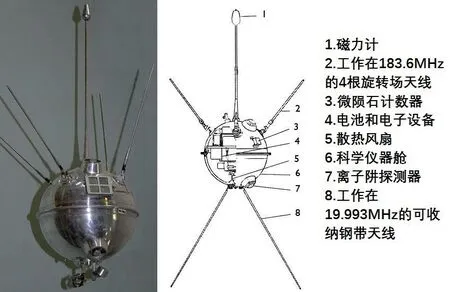
图4 Luna1探测器
月神计划无疑是命运多舛的。前三次发射,分别因为燃烧不稳定、火箭燃料管线中9至13Hz的共振问题、一级发动机的过氧化氢泵故障而失败。1959年1月2日Luna1终于成功发射,奔月速度达到11.17千米/秒。理论上撞击月球的精度可以控制在100-200公里范围,但由于地面导航系统中预设R7火箭无线电导航参数时出现了2°的偏差,导致Block-E多燃烧了几秒,Luna1错过月球,飞行34小时后从月球身边5995公里擦肩而过,进入日心轨道。
这次“投石问路”的壮举真可谓“差之毫厘,谬之千里”!不过即便在阴差阳错下,Luna1测量到月球没有磁场,还测量到太阳发射的等离子流——“太阳风”,并获得“第一颗人造行星”称号。
纠正了导航错误,1959年9月12日,苏联的Luna2号精确地撞击到月球上两座环形山之间,这是人类文明史上第一次将人造物体降落(砸)在月球上。
(二)轨道设计成就“月之暗面”的第一个探测器——Luna3
Luna2号的成功撞击对于美国人来说无疑是一种刺激,但还没等他们缓过神来,三个星期后,Luna3号又从发射场起飞,它重约434千克,不但成为人类近距离拍摄月球照片的首枚探测器,而且向人类传回了首张月球背面的图片。
拍照并回传,在当时来说是高难度动作,摆在面前的难题有:
1、胶片时代,没有数码相机,探测器上需要能冲洗照片并扫描成电信号回传。
2、照相机需要对准月球。
3、没有成熟的定向天线,发射机功率又有限,如何把照片信号可靠的回传地球?要知道苏联在1957年建成的第一代测控网,一共13个站点,但均集中在北半球,只能实现部分区域的测控。(参见图6)
针对第一个问题,列宁格勒电视科学研究所(NII-380)开发了一个光电摄像单元,结构紧凑,f/5.6光圈的200毫米镜头和带有f/9.5光圈的500毫米镜头可同时拍摄两张照片。耐温和抗辐射的35毫米胶片技术,是通过对缴获的美国Genetrix气球进行逆向工程研发。40个胶片存储在铅衬仓中,胶片拍摄完之后显影、定影、干燥,来自阴极发光管的光束扫描胶片,图像由光电倍增管读取并输出成像,实现了1000x1000的分辨率。让探测器变成了一个太空相片冲洗店。(参见图7)

图5 撞击月球的两个不锈钢球体,7.5和12厘米直径,内有炸药,撞击月球放烟花
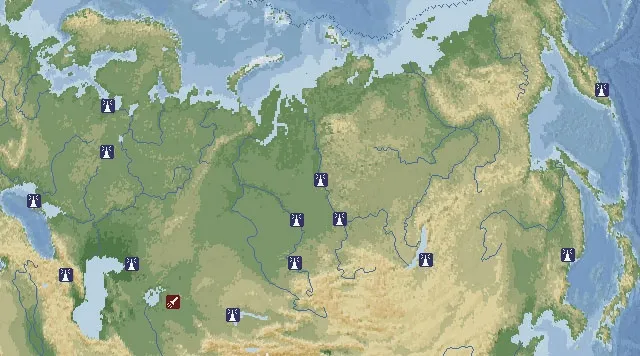
图6 苏联在1957年建成的第一代测控网,13个站点均集中在北半球
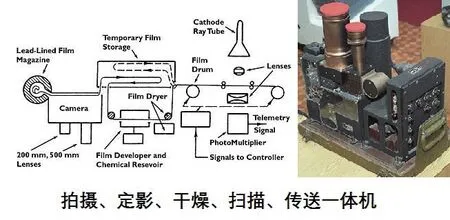
图7 小巧紧凑的太空冲洗扫描店
针对第二个问题,苏联科学家BorisRaushenbakh首次研制出探测器的三轴稳定系统,称为Chaike(Seagull)“查克”控制系统。前后8个广角光电管测量太阳光,下图中(S)和(B)标注,一个窄角月光传感器(m)通过摄像窗口探测月光,三个陀螺仪(d)测量角速度,由继电器构成的专用计算机控制8个微型喷嘴,它们可以发出1/10秒的脉冲,由压力为150大气压的氮气罐提供动力。这套系统能够让相机稳定对准月球拍摄。(参见图8)
第三个问题其实最难。受到卫星条件限制,“冲洗”完的照片数据只能使用3瓦的功率在183.6MHz载波上发送图片信号。地月距离在36~40万公里范围,是上期《GEO通信卫星的秘密|看天线,识卫星——漫谈卫星天线(四)》中讲的GEO轨道的十倍,探测器发回的信号与发射同样功率的地球同步轨道卫星信号相比,强度只有后者的1/127!当时苏联的地球站还不具备远距离接收这么微弱信号的能力,怎么办?(参见图9)
LUNA计划发起者,苏联著名的科学家马斯蒂斯拉夫·克尔德什想了个率性、大胆也是高风险的解决方案——飞回来再接收!探测器借月球引力,辅助机动折返地球,靠近北半球之后再传送信号!这在当时是最复杂的航天器太空机动。
首先必须精确控制好R7火箭第三级的速度,Block-E关机后的速度必须比地球逃逸速度低60-90米/秒,不能超,否则回不来!(参见图10)
其次,要控制好方向,苏联跟踪和制导系统现状只能向北发射,但发射后必须偏转,瞄准月球南极附近,在距离其表面几千公里绕行,受月球引力影响后绕回地球北面,也就是苏联领土上方的无线电测控区域回传数据。在Steklov数学研究所的Strela-1计算机模拟了地球、月球和太阳的引力,精确计算了轨道,并为苏联远东堪察加半岛的耶利佐沃遥测站和西端克里米亚南部的卡什卡山站两个无线电测控提供了建议。
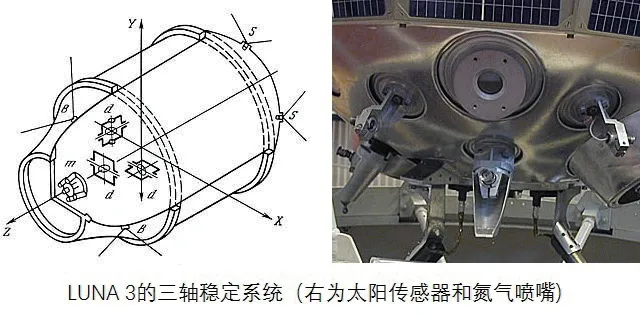
图8 Luna3的三轴稳定系统,右为太阳传感器和氮气喷嘴

图9 照片信号通过Luna3头部四根鞭状旋转场天线发射(183.6MHz),功率仅3瓦
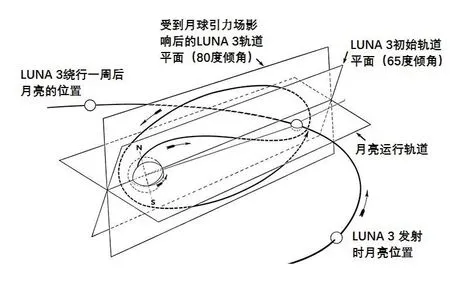
图10 从北面出发,从北面回来,月球引力辅助机动完美解决当时苏联深空探测的短板
作为向人造地球卫星发射两周年纪念的致敬,1959年10月4日,Luna3探测器成功发射,获得了10.855公里/秒的亚地球逃逸速度。在长途奔袭中失去测控,主要依靠定时器按照设定的时序自动开展各项工作,因此Luna3的另一个称谓是“TheAutomaticInterpla netaryStation”(自动行星际站)。(参见图11)
令人佩服的是Luna3首次成功的拍摄到了月球背面的照片。在返程中,由于回传的信号实在太微弱,当探测器靠近地球至4万公里时照片传输才得以有效进行!本次拍摄并成功洗出17张照片,其图像需要8个小时传输,体装式太阳能发电贴片的供电却跟不上,Luna3的无线电发射器只能传一个小时,然后在待机模式等着用太阳能给电池充电两小时再继续……最终花了25小时传送了十多张照片。
说实话,千辛万苦传回的照片质量相当糟糕,但却是人类第一次见到神秘的月之暗面(The Hidden Side Of The Moon),这是首次从太空视角向人们展现月球,以至于在世界各地出版时,引起了广泛的兴奋和兴趣。
二、深空探测的难关和解决策略
苏联月神计划中,地面仅有为数不多的10kW发射机测控站,探测器是区区数瓦的全向发射天线,这些低增益天线系统着实增加了深空探测任务的难度!而测控精度上的细微纰漏又直接影响到任务成功与否。
再来看看美国,作为Pioneer/Able计划的一部分,美国也试图向月球发送简陋的探测器,而所有这些任务都失败了,Pioneer-4是1959年3月3日第一个达到地球逃逸速度的美国航天器,执行的月球飞越任务却偏离了月球有6万公里之多。
月球其实是地球人进行深空探测时家门口的第一站,都遇到了这么多麻烦,后续怎么办!细细分析并归纳起来,难题可以分为三类,而通过几十年的努力也有了一些解决策略。(参见图12、13)
(一)深空探测的测控难
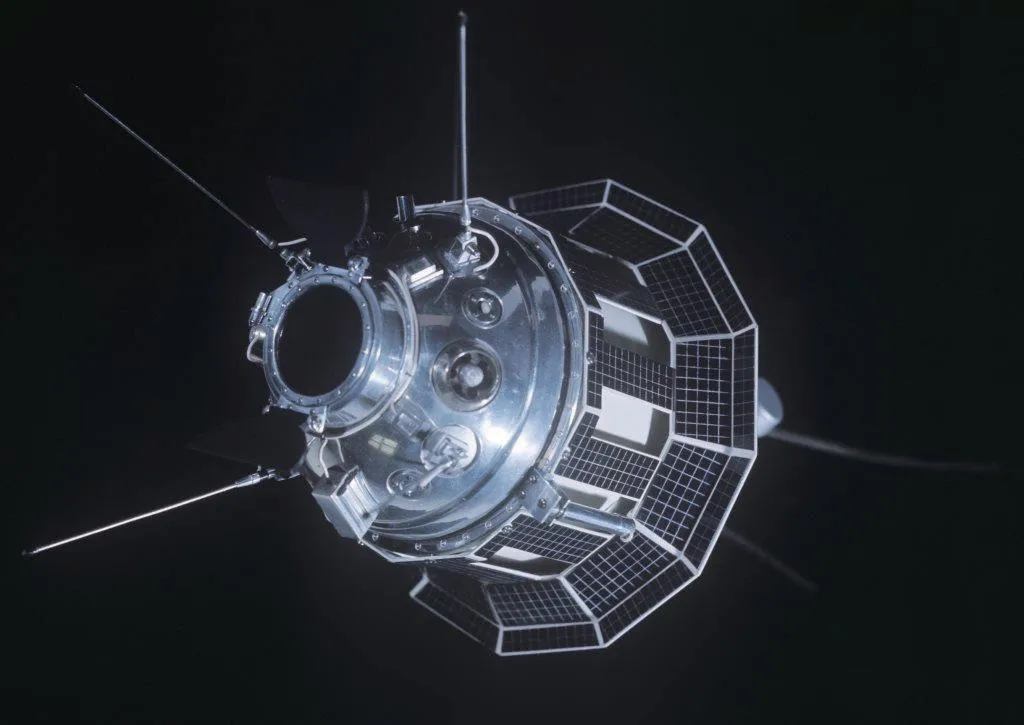
图11 在太空Luna3尾部弹出两根钢带天线构成V型偶极子测控天线(39.986MHz)

图12 月之暗面——1959年Luna3拍摄
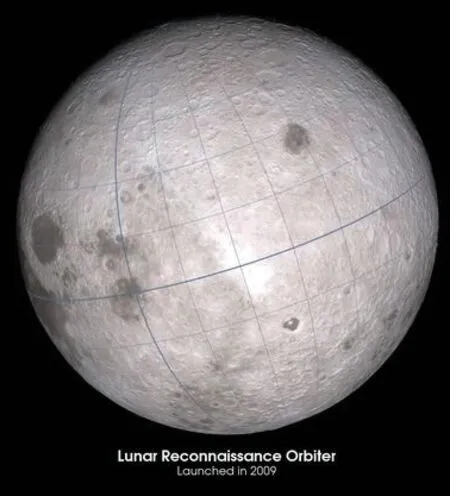
图13 月之暗面——2009年月球勘测轨道飞行器拍摄
国际上对于测控定义为Tracking,Telemetry&Command,即前几期经常提到的TT&C,中文通常称之为“跟踪、遥测及遥控”。对航天测控的跟踪通常包含测距、测速及测角三种操作,对于深空探测来说,用雷达回波时延测试超长距离会面临回波微弱,难以和噪声区别、检测困难的问题,必须采用比特位长特别长的伪随机码才能满足超长距离测距的需要;对于测角来说,传统采用方向性极强的天线波束对准目标航天器,实现对其偏离轴向的方向和大小的测量,该方法对木星以远的深空探测存在精度不足的问题,70年代后期采用了VLBI(甚长基线干涉测量法),简单来说,VLBI就是把几个小望远镜联合起来,多个测控站相隔几千公里组成基线很长的天线阵干涉测量,分别在同一时刻接收同一射电源的信号,对各自的数据记录并进行相关运算,求出观测值,达到一架大望远镜的观测效果,从而极大地提高了分辨率,满足精度要求。一个地日距离下,目前精度已经可以小于1nrad,相当于误差低于150米;实时性要求高的还可以采用NASA1990年代开发的CEI(ContiguousEle mentsInterferometer),连接元干涉仪技术实现实时测角。
遥测通常是指通过遥测系统来获取航天器各系统的工作及环境状态等信息,为航天器的运行或故障处理等提供依据,遥控是指对空间中的航天器进行远距离控制,主要用于对航天器进行数据注入、各种开关控制、载荷控制、轨道控制和姿态控制等。遥测和遥控在数据传输上数量不大,一般而言实时性要求极高,然而对于深空探测来说,30万公里/秒的光速都嫌慢,从下表中可以发现到月球还是秒级的时延,但对于7535~4297百万公里以外的冥王星,单程时延已经长达4~7小时,如果有操作人员按下“发动机点火”的开关,传递到冥王星探测器上,黄花菜也凉了!即便是大家津津乐道的火星,单程时延也达到3.31~22.294分钟,打电话给移民火星的地球人基本不可能,发个短信估计要吃上一顿饭才能收到回复,未来要打星际电话,恐怕只能指望星球大战里的原力成真,实现全息视频通信。(参见图14)

图14 与各个行星之间的超长距离,带来了测控和通信的大难题

图15 国际上对于深空通信上下行链路的频率分配
因此,对于月球探测通信,还勉强可以采用准实时的遥控方式控制航天器平台和有效载荷;对于其他更遥远的行星,需要探测器在不同飞行阶段具备一定的自主导航和制导控制能力。
(二)深空探测的通信难
深空探测器采集到的任务相关数据,比如照片、科学数据,往往数据量比较大,然而长距离造成了极大的信号路径损失,降低了接收信号的信噪比,限制了传输速率的提高。因此,增大天线口径,缩小波束宽度,能量尽可能集中而不浪费在空间,采用抛物面定向天线是较好的办法,这也是题图各式探测器大多“头顶一口锅”的由来。但由于受到航天器安装尺寸、重量的限制,天线口径受限,对于木星及以外的外行星探测还必须采用其他的办法来提高天线增益:
1、尽可能增大天线口径,使用更高的频段
天线增益和天线口径成正比,和波长的平方成反比,理论指导实践,主要的几个航天大国地球站口径从一开始的26米、32米、34米,向64米、70米、100米进军,相当于用大喇叭喊话和大耳廓聆听;也有通过几个天线组阵方式增加天线口径,如在卡西尼造访土星的时候,每天发回的数据量达到4Gb,为了解决这个问题,34米和70米口径天线组阵满足任务需求。
探测器上的天线口径也一样,阿波罗计划探测月球使用的天线口径仅0.6~1.5米,旅行者号增加到3.66米,1989年发射的伽利略号土星探测器增加到4.8米,几乎达到运载火箭整流罩的容纳极限。深空探测的通信频段也在不断提高,1960年代广泛使用S波段作为上下行,1970年代开始启用X波段,1990年代卡西尼号探测器甚至启用Ka波段作为下行。更高的频段,波长更小、天线增益更高,同时也不易受到电离层和太阳等离子区中带电粒子的影响,不过短波长对于天线的加工精度、变形等要求增加,对地球站的热变形、阵风变形、重力下垂变形等考验极大。(参见图15)
2、增加发射功率
为了提高发射功率,深空探测地球站使用数百千瓦到一千千瓦的信号放大器;对于航天器来说,采用高性能太阳能发电帆板供电,木星距离以远的行星,采用同位素热电偶(RTG)发电,以达到最低几十瓦级别的发射功率。
3、采用信道编码、信源压缩技术
由于信号微弱、干扰等原因,地球站接收的数据难免有错,如果采用重传的方式,在大时延的情况下,一来一去,会非常的痛苦。因此纠错编码是一种有效的办法,现有的深空探测器都无一例外地采用了有效的纠错编码方案,典型方案是以卷积码作为内码、里德一所罗门(R-S)码作为外码的级联码。随着计算处理能力的发展,也逐步采用具有优异性能的Toubo码和LDPC码等长码进行信道编码。
另外日常办公使用的数据压缩技术也当仁不让地应用在深空探测上,在相同的传输能力下,能够将更多的数据传回地球,缓解对数据通信的压力。只不过对于耗资巨大、千辛万苦获得的原始图像和科学数据,必须采用无损压缩,一般做到3:1的压缩率。
4、降低地面接收系统的噪声温度
深空探测任务中返回的信号十分微弱,信噪比极低,为了努力降低地面接收系统的噪声水平,普遍在地球站采用低温制冷超低噪声温度放大器。
(三)深空探测的通信保持难
地球在不停地旋转,要和天上的探测器保持7×24小时不间断的通信,要求在地球表面间布下全球性的陆基深空网,理论上在地心角相距120度的地方各建一座地球测控站,即可对巡航期间的航天器进行全天时连续观测。
深空探测虽难,但只要思想不滑坡,办法总比困难多!两个超级大国为了在太空竞赛中拿到更多的第一,在深空探测上可谓拿出了举国之力,然而结局却截然不同……(未完待续)
猜你喜欢
国际太空(2022年7期)2022-08-16
中国船检(2020年11期)2020-11-27
——漫谈卫星天线(五):深空探测器的“大锅”及其测控网(下)
卫星与网络(2019年8期)2019-10-26
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
科学大众(中学)(2016年12期)2016-12-29
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
