基于人工智能神经网络技术的汽车故障诊断
2019-11-30 03:47唐风敏
汽车电器 2019年11期
唐风敏
(中国汽车技术研究中心有限公司,天津 300300)
1 前言
汽车远程故障诊断系统是指在汽车工作时,实时获取汽车各种状态数据,通过分析处理获得汽车的故障信息,并上传至数据处理中心,系统会根据这些信息对汽车的故障进行诊断,并反馈出最佳的解决方案。在条件允许的情况下实施远程自动消除,如无法远程消除则以短信方式通知车主,确保车主及时了解车辆故障,以防行车中危险发生。同时,要将相关故障信息,车辆信息发送到4S店中,及时联系客户安排具体的维修时间、方案等。
由于现在汽车电控系统的复杂性和故障的多样化,使得判断故障及制定解决方案时很难快速准确地找到最佳方案。这是因为故障原因和故障现象没有一对一的映射关系,往往一个故障原因可以产生多种故障现象,一个故障现象也往往可以有多种故障原因[1]。在汽车的故障诊断中,通常没有明确的故障等级分界 (如发动机噪声“较大”和“很大”),这种模糊的描述方式对我们作出准确的判断有很大程度的影响。因此,这里引入人工智能神经网络算法,此问题便迎刃而解。
2 分析
2.1 需求
首先,我们要拥有最为详实的维修数据库,使得确保在最短时间内调取数据库中维修方案为用户提供技术支持,这样就克服了维修点和OEM之间的地域差距问题,节省了工程师出差费用。其次,收集尽可能多的故障类型和相应的维修方案及用户体验的数据,以此为基础完善该车型后续的升级优化策略,提升用户的满意度。
同时,该系统要囊括车辆定位服务、车辆实时监控、安全气囊弹出求助、读取数据流、读取故障码、故障报警处理、清除故障码、车辆救援服务、车辆保养提醒、车辆安全系统、车联网客服中心、碰撞自求助等功能。
2.2 组成
远程诊断系统由远程诊断仪、后台数据中心、用户终端3部分构成。其中后台数据中心是整个系统的核心,远程诊断仪采集的诊断数据将全部传输给后台数据中心,通过后台数据中心的数据处理,通过用户终端与研发、测试、试制、售后、生产制造、用户进行数据交互[2]。系统框图如图1所示。
2.3 问题分析
针对后台数据中心这个诊断系统的核心部分,传统方案通常不能充分利用这个信息量巨大的资源,经常是根据工程师及相关专家的经验通过故障现象推测出故障原因,又由于在远程诊断系统中,工程师不能亲临现场,无法实地考察,只能通过网络传输的故障码等信息来判断,这就大大提高了工作难度。

图1 诊断系统框图
在诊断过程中,往往存在许多的不确定性,诊断仪所反馈的信息通常不完整不详实,面对这些模糊的信息,利用神经网络聚类融合的特性,并且以足够大的诊断案例数据为基础,经过大量的训练即可将故障现象的故障原因以一个较为准确的数学模型映射出来,必将大大提高远程诊断效率和准确性。
3 方案
3.1 设计思路
通过不定时地对汽车各部件特征 (如蓄电池电压、发动机冷却液温度、踏板位置等)等间隔采样若干次,确定故障现象特征向量X,对X进行归一化处理得到神经网络输入向量X,通过神经网络映射出故障原因Y,从而获得具体故障原因和安全等级,并迅速通过GPRS、3G或4G网络将故障原因解决方案等通知驾驶员,提供必要的技术支持。
3.2 具体方案
3.2.1 故障诊断系统结构
根据汽车内部组件的工作机理和故障产生的可能来源设计了一个故障诊断系统,该故障诊断系统框图如图2所示。
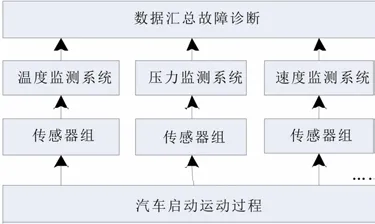
图2 故障诊断系统
由图2可知,在汽车启动运行后,通过各个部件的传感器采集实时数据,根据聚类融合的思想,传感器数据Sx,x∈{T,P,V},经过网络聚类后,得到相应的故障类别Fx,x∈{T,P,V}。这里x取不同的符号表示由T(温度)、P(压力)、V(速度)的异常而引起的汽车故障。

式中:n——某采样点采集数据个数;m——采样点个数。
同理

式中:n——某采样点采集数据个数;j——采样点个数。

所有监测类型所检测数据都可以以此形式表示出来,这里只以这3种为例,后文也只建立以这3种检测数据为基础的诊断模型。
3.2.2 汽车聚类融合故障诊断结构
通过这3组传感器分别获得不同监测点的实时数据,其中在温度传感系统中初步提取发动机进气温度、发动机冷却液温度、发动机机油温度、变速器润滑油油温4组温度监测数据。在压力传感系统中初步提取机油压力、进气压力、轮胎压力、ABS油压4组压力监测数据。在速度传感系统中初步提取发动机转速、轮胎转速2组速度监测数据。
这3组被监测的物理量可能对某一故障都会产生某一片面的故障现象,但都不能全面地反映故障原因,于是通过神经网络聚类融合技术将各种故障现象聚类分析,综合考量会得到更为具体全面的结果。设计的原理结构图如图3所示。

图3 聚类融合原理结构图
在图3聚类融合原理结构图中,采用了分布式和两级的聚类融合控制系统结构[3-4],第1级由10个ART-2神经网络构成,分别对3组不同物理传感信号进行融合,第2级用1个BP神经网络对第1级融合的结果进行2次融合,最终融合结果输入到不同的聚类融合空间,经复杂映射到类别空间,由网络自行运算得到了控制策略,这个策略可以帮助我们进行故障诊断、事故预报、生产指导等具体工作[5]。
该网络系统的具体映射过程如图4所示。

图4 网络映射过程
3.2.3 数学模型初步建立
在BP神经网络中的网络数学模型包括:节点输出模型和作用函数模型。
隐层节点输出模型:

输出节点输出模型:

式中:f——非线性作用函数;q——神经元阈值。
作用函数模型:
作用函数一般取为(0,1)内连续取值Sigmoid函数:

在这个网络模型的传感器模式空间中,记录数据如下。

将记录的数据转化为状态信息,每一个测量值都有其正常范围。我们规定:当测量值在该范围内时,令状态值为1,当测量值不在该范围内时,令状态值为0。举例说明。

压力和速度的状态信息都可以用此形式表示。
由于我们所诊断的汽车故障通常都是会维持一段时间的,所以我们可以将传感器数据采样方式设置为采样间隔2s,采样窗口大小为20s,这样每个采样点在一个采样窗口中可以采集11个数据。将这3组采集到的数据经信息处理模块进入输入信息空间X,即将这3组数据经过第1级的10个ART-2神经网络融合后,得到了各自输入向量Xi。

系统的输入信息空间输入向量

由系统输入信息空间经映射Φ到聚类融合空间C,这里映射Φ由10个ART-2神经网络组成每个网络的维数K=11,其他参数如对比度常数,调整子系统常数等以及之后的BP神经网络模型的建立均需要根据具体实际情况由专业数学建模人员来完成。之后再由聚类融合空间C经映射φ到类别空间。这里类别空间即指导致汽车发生故障现象的故障原因 (故障原因需要通过后台中心数据库中大量诊断病例来获得)和故障等级,如将故障分为①正常、②轻微、③一般、④严重、⑤非常严重5个等级,通过建立特定的BP神经网络模型,输出对应的故障原因和故障等级[6]。
BP神经网络的建立需要通过对大量的采集数据进行训练自学习,通常用MATLAB工具建立BP神经网络仿真模型,我们需要对这个模型输入后台数据库中大量的诊断案例的故障现象和故障原因及故障等级的对应关系,设置学习率,训练步数,经过多步的训练自学习从而由该BP网络自行建立一个复杂的模糊映射关系。这个复杂的映射关系建立成功后,再有数据输入就会产生对应的输出。也就是说,输入故障现象向量X,经过网络映射就会得到故障原因和故障等级向量Y。BP神经网络结构如图5所示。

图5 BP神经网络结构
最后输出向量Y经映射ψ到控制策略空间U,这个空间可为我们提供相应的诊断方案、事故预报和生产指导。这样,一个完整的基于人工智能神经网络的远程故障诊断系统就搭建完毕。
4 结束语
通过这个人工智能神经网络远程诊断系统可以实现当故障发生时,仅通过将各个部件设置的传感器系统所采集的物理信息输入该智能系统,就可得到我们通常很难判断准的故障原因和故障等级以及种种售后服务信息,再经由GPRS或3G或4G网络将这些信息发送给用户[7-8],不仅及时为用户提供了必要的技术支持,更增加了售后服务的人性化智能化的特点,也将大大提高用户体验的满意度[9-10]。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年9期)2022-05-20
南京理工大学学报(2022年1期)2022-03-17
煤气与热力(2022年2期)2022-03-09
北京航空航天大学学报(2021年4期)2021-11-24
计算机应用与软件(2021年7期)2021-07-16
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
软件(2017年6期)2017-09-23