飞行试验脚蹬力测试系统在线校准技术研究
2019-12-02 07:13
计算机测量与控制 2019年11期
(中国飞行试验研究院 测试所,西安 710089)
0 引言
飞行试验中,机载测试是获取飞行数据的重要途径,而脚蹬力参数是机载测试中的重要测试参数之一。对试飞员施加于脚蹬力传感器的力值信息进行精确的测量与分析,对试验机的操稳性能的有效评价具有重要意义。应变式力传感器由于其测量范围大、分辨率高、测量精度高等特点,在飞行试验机载测试领域常用于测量飞行中操纵力的变化。
机载脚蹬力测试系统[1]的测量准确程度直接影响到飞行试验科目的试飞质量。定期对机载脚蹬力测试系统进行校准是系统准确测试的可靠保证。工程上应用的脚蹬力传感器是力值与其输出呈线性关系的传感器,国内对机载脚蹬力测试系统按照Q/FY.J02.52.2-2013进行校准[2],校准周期为一年。由于脚蹬力传感器安装于狭窄的驾驶舱内,通过在现场施加标准力进行校准非常困难,因此采用拆卸后实验室校准的方式。将传感器与采集器拆除,在实验室使用标准施力装置进行校准,完成后再将其恢复安装,最终曲线用作后续飞行试验数据处理标准[3]。
传统校准方式存在的问题:整个拆校过程一般需2天时间,易影响型号任务的进度;传感器和采集器经频繁拆卸,极易损坏,造成国有资产浪费。因此,亟需设计一种切实可行的在线校准技术,实现脚蹬力传感器在机上原位快速、准确校准,以适应目前快节奏高效率的试飞工作需求。本文旨在从传感器原理出发,结合传统传感器校准方式,对在线校准技术进行研究,寻求一种切实可行的校准方法,并对最终效果进行验证。
1 脚蹬力测量原理及校准简述
应变式传感器具有测量范围大、分辨率高、测量精度高等特点;测量结果便于传递、处理;既可测静态,也可测快速交应变力;性能稳定、工作可靠;能在各种恶劣环境、大加速度和振动条件下工作;只要进行适当的结构设计及选用合适的材料,能在高温/低温、强腐蚀及辐射条件下可靠工作[4]。应变式脚蹬力传感器用于测量飞机脚蹬板受力大小,属于力传感器。采用应变式测量原理,通过粘帖在弹性元件上的电阻应变计感受应力的变化,产生与应力成比例的电信号,该电信号经变换器信号调理后输出与被测力成比例的电压信号,桥路原理如图1所示。
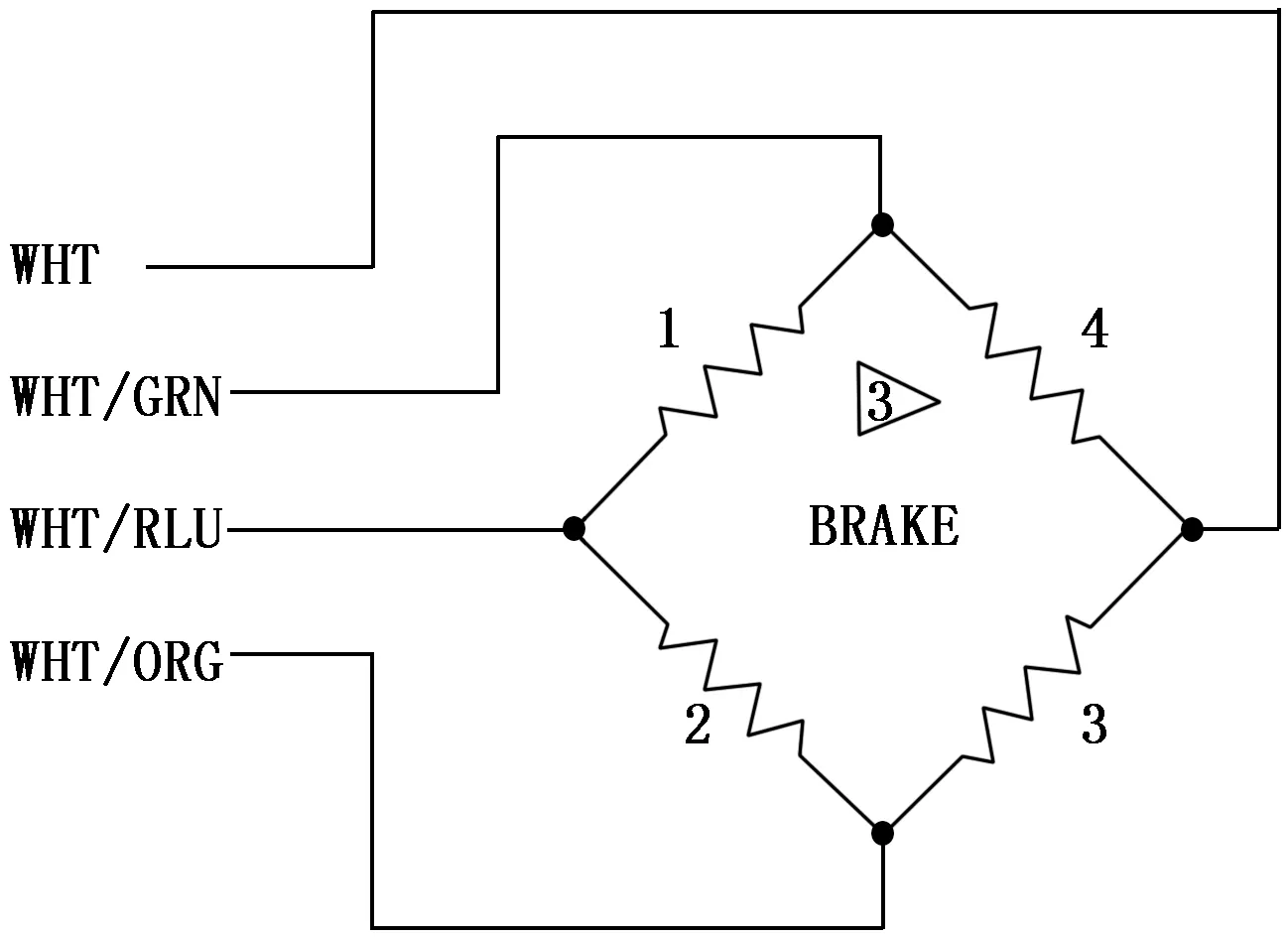
图1 桥路原理图
校准时,通常对由脚蹬力传感器、采集器等测试仪器组成的脚蹬力参数测试系统进行系统校准,获取在规定的条件下具有置信度概念的测试仪器的输入—输出特性[5]。校准前首先将机上的传感器与采集器拆除,在实验室使用标准施力台进行校准,记录标准力值与码值数据,处理校准数据,完成初始校准曲线;在实验室校准完成后将传感器与采集器恢复机上安装,记录下此时传感器的机上零位,将初始校准曲线以该零位进行修正,生成最终的校准曲线,传递至数据处理人员,用作后续飞行试验数据处理的标准使用。
2 机载脚蹬力在线校准方式分析
传统校准方式下整个拆校过程一般需2天时间,易影响型号任务的进度;传感器和采集器经频繁拆卸,极易损坏,造成国有资产浪费。为缩短工作时间、提高工作效率、减少拆卸损伤,脚蹬力传感器的机上在线校准技术是试飞测试校准专业中亟待解决的问题。
2.1 在线校准方法思路
选择一只高精度标准力传感器,用作实现机上脚蹬力传感器在线校准的标准。在实验室使用标准施力台对标准力传感器进行校准,记录标准力值与传感器输出电压值,形成标准力传感器实验室校准曲线。将标准传感器紧密贴合并固连于机上传感器之上[6],通过机上采集器为标准力传感器及机上脚蹬力传感器供电,准备完成后力值由人为缓慢地为两只传感器施加,施力过程中由校准计算机持续记录标准力传感器与机上脚蹬力传感器的输出码值数据。将标准传感器的实验室校准曲线作为参考,从记录的数据中提取相应校准点,最终形成机上传感器的校准曲线。
2.2 在线校准问题分析
在实验室使用标准施力台对标准力传感器进行校准的过程中,均采用标准的10 VDC供电;但在飞机机舱内环境复杂,一般只能由采集器为该传感器进行供电。这将造成标准传感器在实验室校准与机上校准时供电电压值的不一致。由于标准力传感器采用的是应变电桥原理,传感器的输出与其供电电压成比例关系,供电电压值的不一致会导致传感器输出电压的不一致,影响机上脚蹬力传感器的最终校准数据[7-8]。
理论上,应变电桥原理的传感器输出与其供电电压成正比关系,但仍需要对标准力传感器的输出电压与供电电压的关系进行进一步实验验证。选择一只标准脚蹬力传感器,分别为其输入供电电压9.797 V、9.892 V、10.004 V及10.095 V,输出数据如表1。
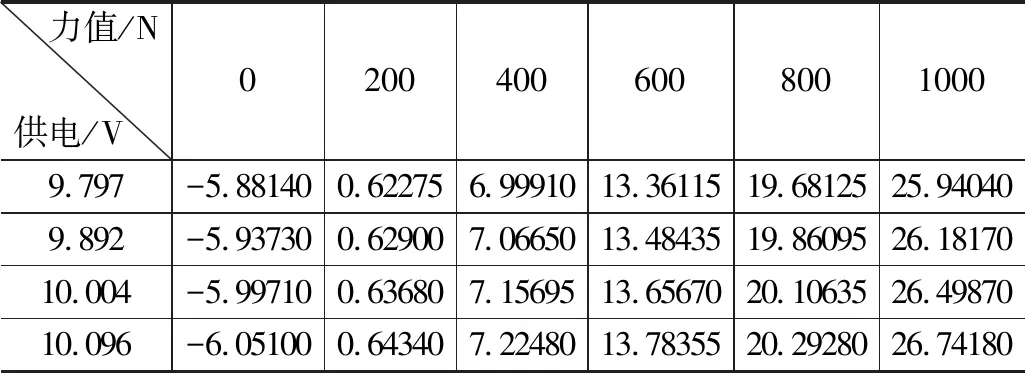
表1 不同供电电压下传感器输出(mV)数据表
由表1可以分别计算出各组供电电压下标准脚蹬力传感器输入力值X(N)—输出电压Y(mV)的关系曲线,见表2。可知该传感器的输出电压与供电电压成明确的正比关系,以10.004 V供电下标准脚蹬力传感器的输出电压为基准,将传感器输出电压与其供电电压间的正比关系以斜率(mV/N)/供电(V)来考察,其相对误差在0.06%以内。脚蹬力参数测试系统要求校准精度在1%内,因此在校准过程中可以忽略这一误差的影响,可以将标准力传感器输出电压与供电电压作为完全的正比关系进行处理。
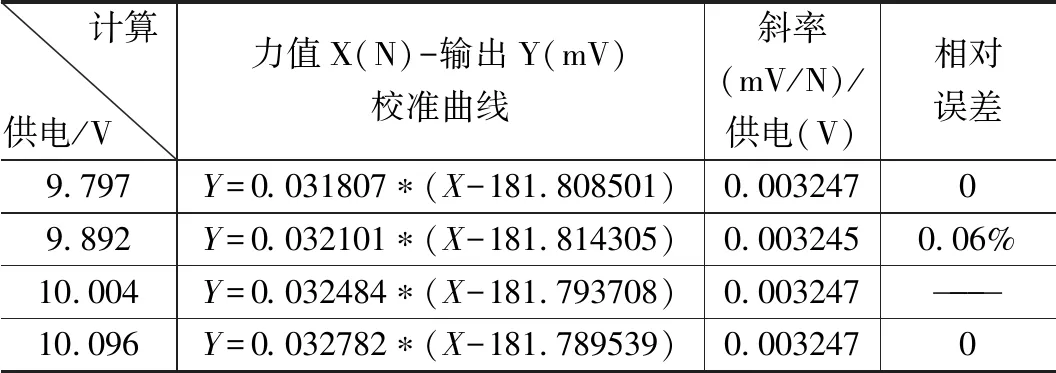
表2 不同供电电压下传感器输出数据表
因此,由实验室与机上标准力传感器供电电压不一致导致的标准力传感器输出电压不一致的问题,可利用标准力传感器输出与供电电压间的正比关系进行修正[9]。
3 在线校准方法研究
由本文上一节的分析可知,机载脚蹬力参数测试系统在线校准技术的整个实施环节可以按以下4个步骤分步进行。
3.1 标准传感器的选择
选择一只标准脚蹬力传感器,用作脚蹬力测试系统在线校准的标准使用。由于在课题中对机上脚蹬力传感器要求的精度为0.5%,按GJB1692的要求,因此选择的标准脚蹬力传感器的精度必须要高于0.17%。另外,为避免在机上在线校准的过程中,由于受力点不一致导致标准脚蹬力传感器与机上脚蹬力传感器的输出产生不必要的偏差,需要选择与机上脚蹬力传感器结构外形一致的高精度力传感器作为标准[6],要求其精度达到0.17%及以上。
3.2 标准传感器的实验室校准
参照标准Q/FY.J02.52.2-2013[2],在实验室环境下(温度为22 ℃,湿度为45%RH,场压为97.02 kPa)使用检定精度为0.05%的BJM-10标准施力台对标准力传感器进行校准。使用高精度可调直流电源为标准力传感器进行直流供电,供电电压为10 VDC。通过标准施力台逐步为标准力传感器施加一系列共11个标准力值0 N、100 N、200 N、300 N、……、1000 N,对标准力传感器进行逐点校准。反复进行3个正反形成的校准,逐点记录下施加的标准力值与传感器输出电压值,具体数据如表3。

表3 标准传感器校准数据及分析
3.3 机上校准
实验室将标准力传感器校准完成后,采用双面胶贴合与铝箔胶带固定相结合的方式将标准力传感器紧密贴合并固连于机上脚蹬力传感器的表面。由机上的采集器为标准力传感器及机上脚蹬力传感器同时进行供电。
实验室校准过程中标准力传感器的供电电压与机上校准过程中采集器提供的供电电压不一致,需要对标准传感器的实验室校准数据进行供电电压不一致的修正:

其中:V实为实验室校准过程中的供电电压,单位为V;V机为机上现场校准过程中采集器施加的供电电压,单位为V;U为实验室校准时标准力传感器输出电压,单位为V;U修为经供电不一致修正的标准传感器的输出电压,单位为V。
最后,为将实验室标准力传感器的校准数据中的电压值换算成码值,需要获得标准力传感器所在采集器采集通道的电压-码值对应关系,采用现场为采集通道加电压信号的方式获得,对应关系如图2所示。因此,经供电不一致修正的标准传感器输出电压对应码值M修为:
M修=1456.33U修+14563.33
由表3,将标准力传感器的实验室校准数据进行供电不一致修正,并进行码值换算,获得标准传感器实验室校准最终修正数据如表4所示。
最后,人为缓慢为标准力传感器与机上脚蹬力传感器施加力值,施力过程中通过校准计算机采集并记录标准传感器与机上传感器的输出码值数据,记录的两只传感器的码值数据曲线如图3所示。

图2 标准传感器采集通道电压-码值关系图

表4 标准传感器修正数据

图3 标准传感器及机上脚蹬力传感器码值曲线图
3.4 校准数据的计算
以标准力传感器的实验室校准后经修正的数据(如表4)作为参考标准,并从机上校准过程中校准计算机记录的数据曲线(如图3)中提取相应合适的11个校准点(0 N、100 N、200 N、300 N、……、1000 N),将两组数据相结合,形成最终机上脚蹬力传感器的校准数据,并将机上脚蹬力传感器的输出码值按自由状态的零位值进行零位修正,最终数据如表5所示。
4 工程验证
选择多架试验机上共6个脚蹬力参数作为研究对象,对本文提出的脚蹬力参数测试系统在线校准技术进行验证。
分别采用传统的脚蹬力实验室校准方法以及本文提出的脚蹬力参数测试系统机上在线校准方案来实现脚蹬力参数的校准。原实验室校准的方法已经经过几十年飞行试验的验证,其准确度与可信度非常高,可以将其作为基准与本文提出的新校准方法进行一致性比对来进行新校准方法的工程验证[5]。

表5 脚蹬力传感器校准数据
依据Q/FY.J02.52.2-2013试飞操纵力参数测试校准标准,分别采用传统实验室校准的方法与本文提出的新校准方法对6个脚蹬力参数进行校准。由此分别得到一共12组测量点(fmi,nmi),m≥9,i≥4。
由式(1)~(4),按最小二乘法分别拟合这6个参数在两种校准方法下的校准曲线[10],(fm,nm)为各校准点测量结果的平均值。
(y,n)=A+B(x,f)
(1)
其中:
(2)
(3)
(4)
以某架机的一个脚蹬力参数测试系统为例,如图4,采用传统实验室校准方法与本文提出的机上在线校准新方法得到的校准曲线基本重合。

图4 两种方法下校准曲线对比图
截取这6个脚蹬力参数的部分飞行试验数据,分别使用由传统实验室校准方法与本文提出的机上在线校准新方法获得的校准曲线进行数据处理,校准结果的最大偏差如表6所示,B与A分别为各拟合直线的截距与斜率。在这两种校准方法下的最大码值偏差与总量程的比值不超过0.15%。根据标准Q/FY.J02.52.1-2013《试飞参数测试系统校准总则》[11]可知,采用本文提出的机上在线校准新方法获得的校准曲线均能够满足测试精度需求,该方法切实有效,可以应用于机上脚蹬力参数测试系统的校准工作。

表6 两种校准方法结果分析
5 结论
本文从理论分析出发,研究了一种机载脚蹬力参数测试系统现场在线校准方法,解决了其中供电不一致的问题,并最终完成了实验室与工程验证。该方法合理地解决了传统校准方式下传感器频繁拆卸的问题,避免了拆卸造成的损坏,并提高了工作效率。在飞行试验中,对多个脚蹬力参数采用传统校准方法与新校准方法分别得到的校准曲线具有高度一致性,最大码值偏差不超过总测量范围的0.15%,满足飞行试验机载测试精度需求,能够应用于机载脚蹬力参数测试系统的校准工作。
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09
新生代(2019年11期)2019-11-13
新生代·上半月(2019年6期)2019-09-10
振动工程学报(2019年2期)2019-05-13
农家科技下旬刊(2017年5期)2017-06-20
世界博览(2016年17期)2016-09-28
幼儿智力世界(2004年5期)2004-05-27