基于斯特林散热的半导体制冷器温度控制系统
2019-12-09 07:00吴聿聪杨遂军杨伟华叶树亮
仪表技术与传感器 2019年11期
吴聿聪,杨遂军,丁 炯,杨伟华,叶树亮
(1.中国计量大学,工业与商贸计量技术研究所,浙江杭州 310018;2.杭州仰仪科技有限公司,浙江杭州 310018)
0 引言
半导体制冷器具有响应速度快、体积小、热惯性小、便于冷热切换等特点[1],在生物医疗、理化参数测试等领域的仪器设备中得到了越来越广泛的应用[2-3],如PCR仪、石油低温流动性分析仪等,但其制冷能力受冷热面温差影响较大,对热端散热设计要求较高。
徐颖达等使用-10 ℃的低温防冻液为三级半导体制冷器散热,最低制冷温度达到-72 ℃[4];苏家雨等使用三级半导体制冷器,结合真空密封与常温水冷循环对CCD进行低温控制,最低温度可达-80 ℃[5];安春明等使用压缩机对三级半导体制冷器进行散热,最低温度可达-80 ℃[6]。以上温度控制系统均使用水冷循环槽或压缩机为半导体制冷器进行散热,散热设备体积大,部分还需要真空密封,且最终制冷温度均在-80 ℃以上,难以满足仪器深低温、小型化的需求。
针对上述温度控制系统的不足,本文提出以商用小型斯特林制冷机为热端散热装置,三级半导体制冷器为控温执行器,采用单神经元PID算法提高控温精度的温度控制系统。
1 系统总体设计
1.1 设计思路
半导体制冷器温控系统一般使用风冷或水冷散热,其热端仍会保持在较高温度,限制了低温制冷能力;斯特林制冷机具有体积小、冷量大、寿命长、等优点,随着现代制造技术的发展与成本的降低,逐渐在商用领域得到应用,但其为机械式制冷方式,温度响应较慢,精确控温周期较长。本文结合半导体制冷器与斯特林制冷机的优点,使用斯特林制冷机为半导体制冷器热端散热,在不需要真空密封的情况下,使热端温度下降到较低值,提升了系统的低温制冷能力,并保留了半导体制冷器快速响应、精确控制的特点。
1.2 系统结构
半导体制冷器温度控制系统主要由上位机、下位机主控电路、三级半导体制冷器及其驱动电路、温度传感器、斯特林制冷机、被控对象组成。制冷器由隔热材料包裹,铜制样品池作为控温对象,制冷器热端与斯特林制冷机冷头通过匀热铜块相连,温度传感器分别连接在铜制样品池与匀热铜块上,测定冷热端温度,并通过AD传入下位机主控电路,单片机运行单神经元PID算法输出功率占空比,调节电压电流对三级半导体制冷器进行温度控制,形成一个闭环反馈,图1为系统结构示意图。

图1 半导体制冷器温度控制系统
2 系统硬件设计
2.1 斯特林制冷机
斯特林制冷机种类繁多,制冷能力差异较大,考虑到实用性与成本问题,本系统选用价格低廉的小型自由活塞式斯特林制冷机,整机质量约为2.3 kg,输入电压为220 V,最大制冷功率为80 W,无负载最低温度可达-130 ℃,基于MODBUS_RTU协议,可使用单片机进行串口通讯控制输出功率。
2.2 温度采集转换
本文测温部分选用直径0.8 mm的高精度K型热电偶进行温度测量,热电偶将温度信号转化为电势信号,经过滤波、放大以及A/D转换后送入单片机进行处理。图2为温度采集转换电路。

图2 温度采集转换电路
为避免环境中的电磁干扰以及减少电路的复杂程度,滤波电路选用RC低通滤波电路,置于前级滤除干扰信号。A/D转换芯片选用低噪声、低功耗、多通道的24位模数转换器AD7794。其集成一个低噪声可编程增益仪表放大器,放大倍数在1~128倍之间可调,避免独立放大电路设计,内部集成高精度基准电压源(1.17 V),不仅满足A/D转换中高精度基准电压需求,也简化了温度采集转换电路设计。24位分辨率保证了对热电偶电势变化的辨识能力,均方根噪声仅为40 nV,满足温控系统对温度测量的精度需求。
2.3 冷端补偿电路
热电偶测温需要冷端补偿。本系统选用热敏电阻作为冷端温度的测温元件,常规测量方法是使用高精度恒流源为热敏电阻供电,通过AD采集热敏电阻两端电压,得到热敏电阻阻值,再经过转换公式得到冷端温度[7]。但在实际使用中,恒流源电路设计复杂,高精度恒流源集成芯片价格昂贵,本系统使用比率法,消除了恒流源带来的影响,减少了成本,电路如图3所示,将高精度电阻REF与热敏电阻RT串联,采用1.2 V电压供电,使用AD7794分别采集高精密电阻与热敏电阻两端电压,两者电压之比与电阻之比相等,可得到热敏电阻阻值,最终计算出冷端温度。

图3 冷端补偿电路
2.4 半导体制冷器控制
系统选用三级半导体制冷器作为控温执行元件,输入电压为12 V,最大电流为5 A,理想情况下最大制冷温差可达114 ℃,但在非真空室温工况下,最大制冷温差仅为70 ℃。半导体制冷器功率由单片机输出PWM波进行控制,为防止大功率驱动干扰对控制信号的影响,选用TLP2366高速光耦将单片机主控单元与功率控制单元隔离。半导体制冷器驱动换向电路采用经典H桥驱动电路,选用SIR416型MOS管作为开关器件,针对H桥电路的控制死区,选用IR2110作为MOS管控制芯片,防止H桥短路。为避免PWM的高低切换对半导体制冷器的冲击,在半导体制冷器两端构建双极平衡型LC低通滤波电路,稳定输出幅值。半导体制冷器控制结构如图4所示。

图4 半导体制冷器控制结构
3 系统软件设计
半导体制冷器温度控制系统软件设计主要包括上位机与下位机软件。上位机软件实现控制目标温度参数的传递,控制系统实验的启动与结束、显示实时温度状态并绘制曲线等。下位机软件主要负责温度的采集与转换、温度控制算法处理、控制斯特林制冷机等。
3.1 上位机软件设计
为方便操作人员控制系统工作、实时观测系统温度状态并记录下实验过程数据,使用LabVIEW开发上位机软件。上位机软件通过异步串口与下位机进行通讯,采用判断帧头帧尾、数据长度位、异或校验位来保证传输数据的可靠性。用户可通过软件将目标温度、单神经元PID初始值等参数下发给下位机,通过启动按键控制实验的开始与终止。上位机可实时解析下位机发送的数据,在显示界面将温度值与温度速率实时绘图显示,并将实验过程中的相关数据保存在对应TXT文件中,方便后续分析。
3.2 下位机软件设计
下位机软件是整个温度控制系统的核心,根据上位机下发的目标参数来实现对温度目标的控制。系统的下位机软件流程如图5所示。系统上电复位后,开始程序初始化,配置各中断与预设变量;外部AD开始温度采集,采集完毕后触发外部中断,在外部中断中完成温度数据的读取与转换;在定时器中断中判断上位机参数是否设定完成,若设定完成,根据设定温度与斯特林进行通讯,启动散热,运行温控算法,输出一定占空比的PWM波信号,控制TEC功率输出,实现被控对象的温度调节。当收到上位机停止命令后,停止温控流程。
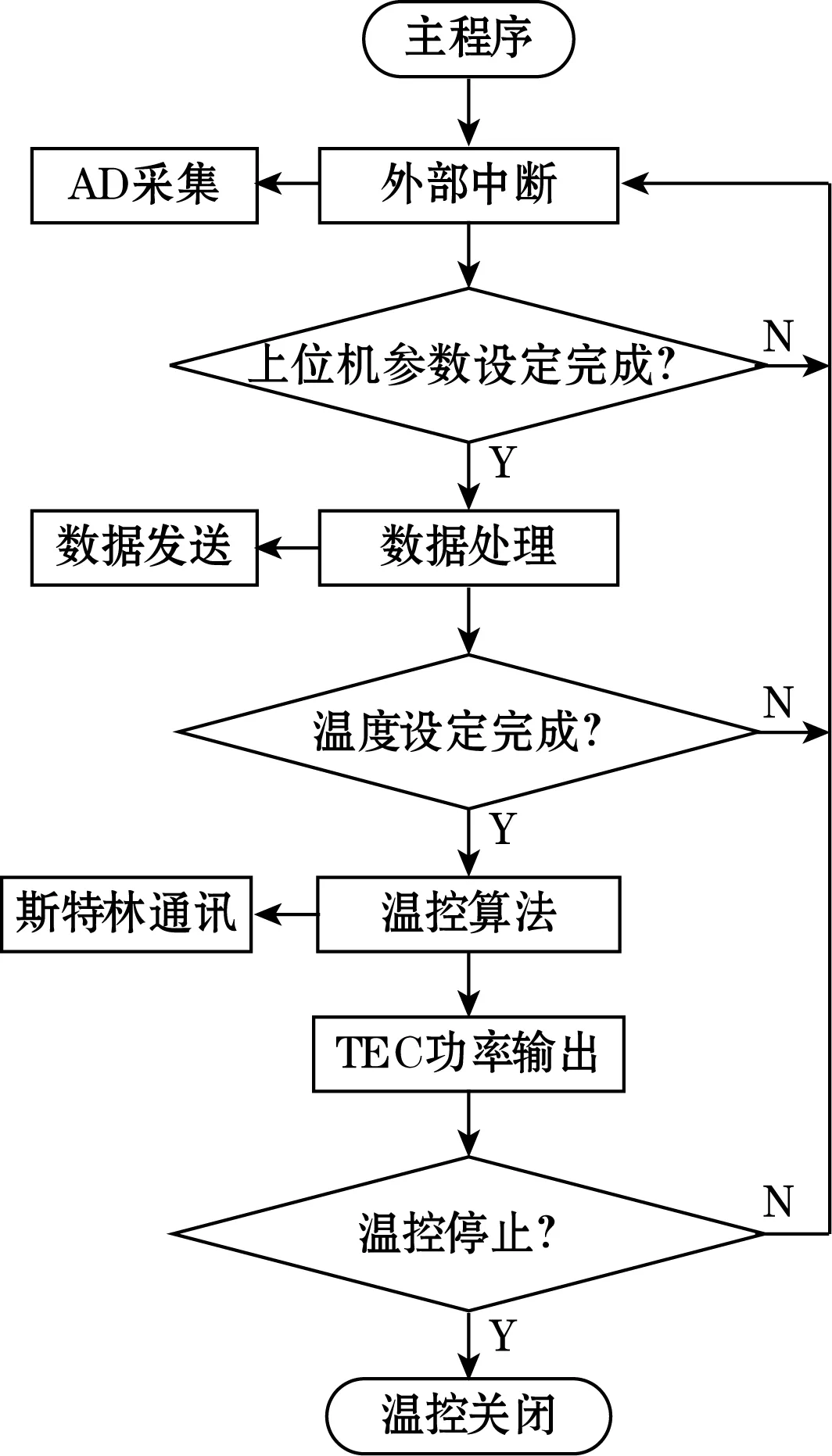
图5 下位机软件流程图
3.3 单神经元PID算法设计
半导体制冷器具有复杂的非线性与时变性特征,传统PID控制参数固定,适应性较差,故系统采用适应性强、实时性好的单神经元PID进行温度控制[8]。单神经元PID控制器通过改变加权系数wj来实现自适应调整的功能,目标输出与实际输出的差值进入转换器,在误差信号的作用下,转换器按照学习规则来动态调整加权系数,计算状态量并累加输出,从而快速使被控对象的实际值接近目标值。单神经元的结构图如图6所示。
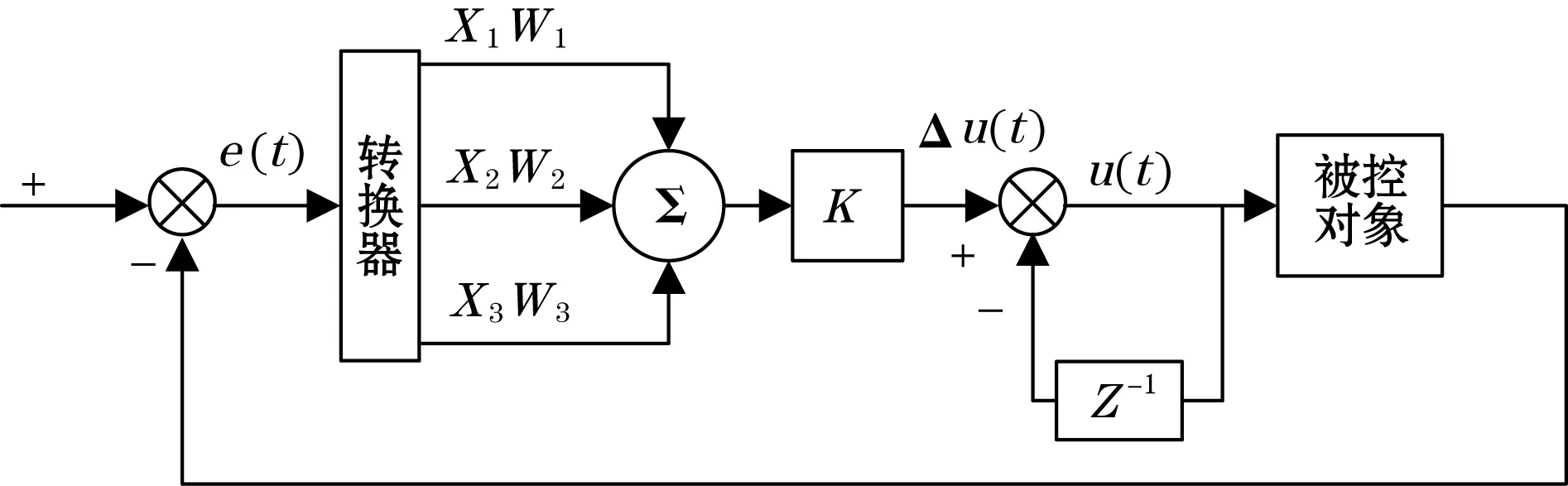
图6 单神经元PID结构图
在控制过程中,误差信号经转换器转换为状态量x1,x2,x3其表达式如下:
(1)
式中e(t)为第t时刻的误差量。
单神经元输出控制信号的表达式为
(2)
式中:u(t)为t时刻控制量;Δu(t)为t时刻控制量增量;K为增益系数;wj(t)为t时刻加权系数。
加权系数wj(t)采用delta学习规则进行计算:
wj(t+1)=wj(t)+ηje(t)xj(t)
(3)
式中ηj为学习速率。
为了避免加权系数过大导致系统收敛性不良,对加权系数进行规范化处理,表达式如下:
(4)
单神经元PID输出表达式为
(5)
4 实验数据分析
4.1 系统极限低温实验
为验证控温系统极限低温能力,进行极限低温实验,实验装置如图7所示。首先开启斯特林制冷机全功率制冷,同时启动半导体制冷器控制被控对象在28 ℃进行恒温,当斯特林制冷机制冷到最低温度时,开启半导体制冷器进行全功率制冷,并实时记录温度。图8为水冷散热TEC极限低温、单纯斯特林制冷极限低温、复合制冷极限低温曲线图。
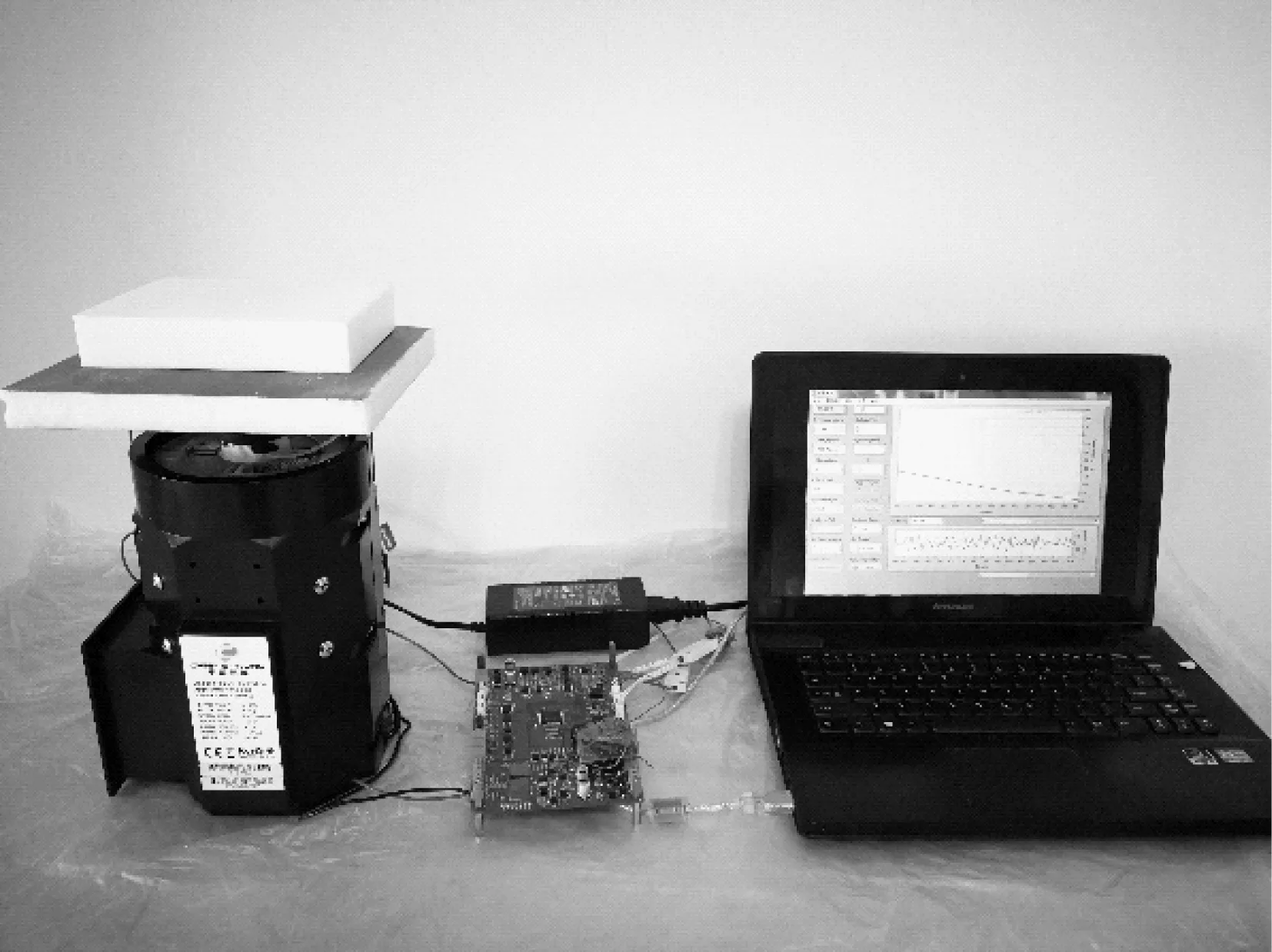
图7 温控系统实物图
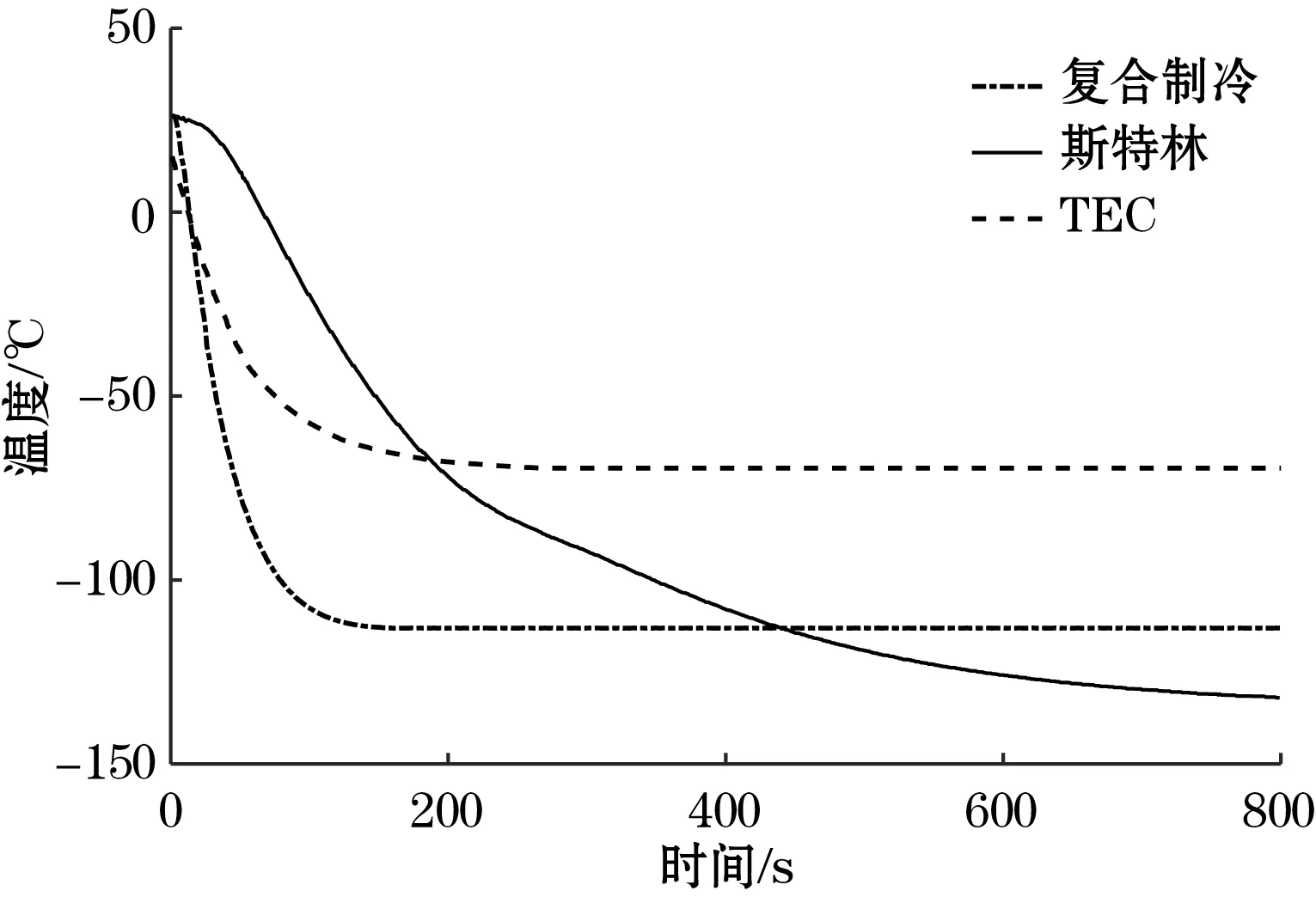
图8 极限低温曲线对比图
由图8可得,复合制冷极限低温达到-113 ℃,由室温28 ℃制冷到-113 ℃仅需150 s,平均降温速率达-56.4 ℃/min;制冷到-100 ℃仅需79 s,平均降温速率达-97.2 ℃/min。相较于传统半导体制冷器控制系统得到了更低的制冷温度;相比于单纯的斯特林制冷机,有着更快的降温速度与温度控制过程。
4.2 系统控温精度实验
系统控制精度是温控系统中的重要指标,温控精度实验选取-30 ℃、-60 ℃、-90 ℃ 3个温度点进行实验。在室温25 ℃的情况下,对被控对象进行恒温控制,待温度稳定后,记录400~650 s内的温度波动,温控曲线与温度精度曲线如图9、图10所示。
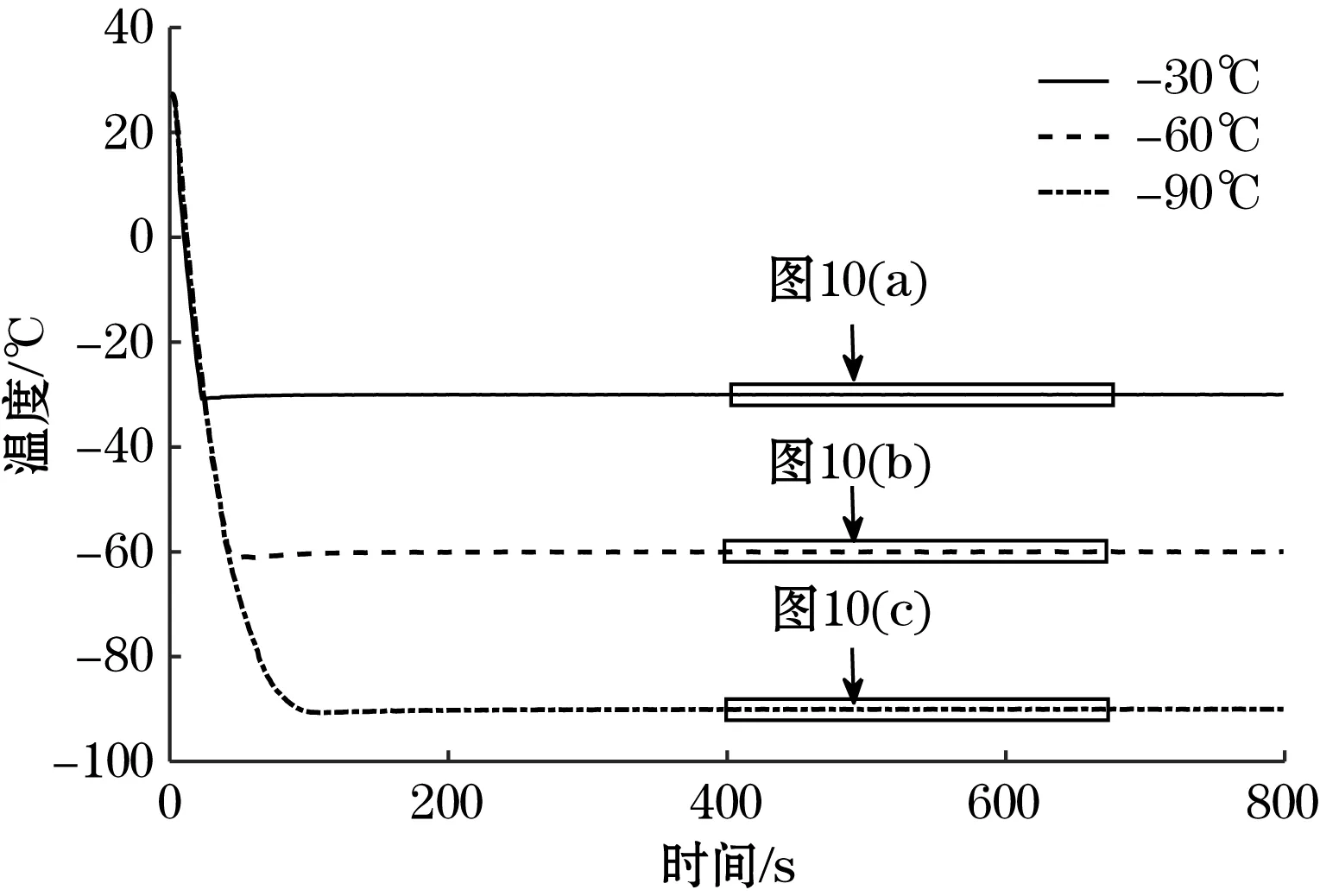
图9 -30 ℃、-60 ℃、-90 ℃温控曲线图

(a)-30 ℃控温精度
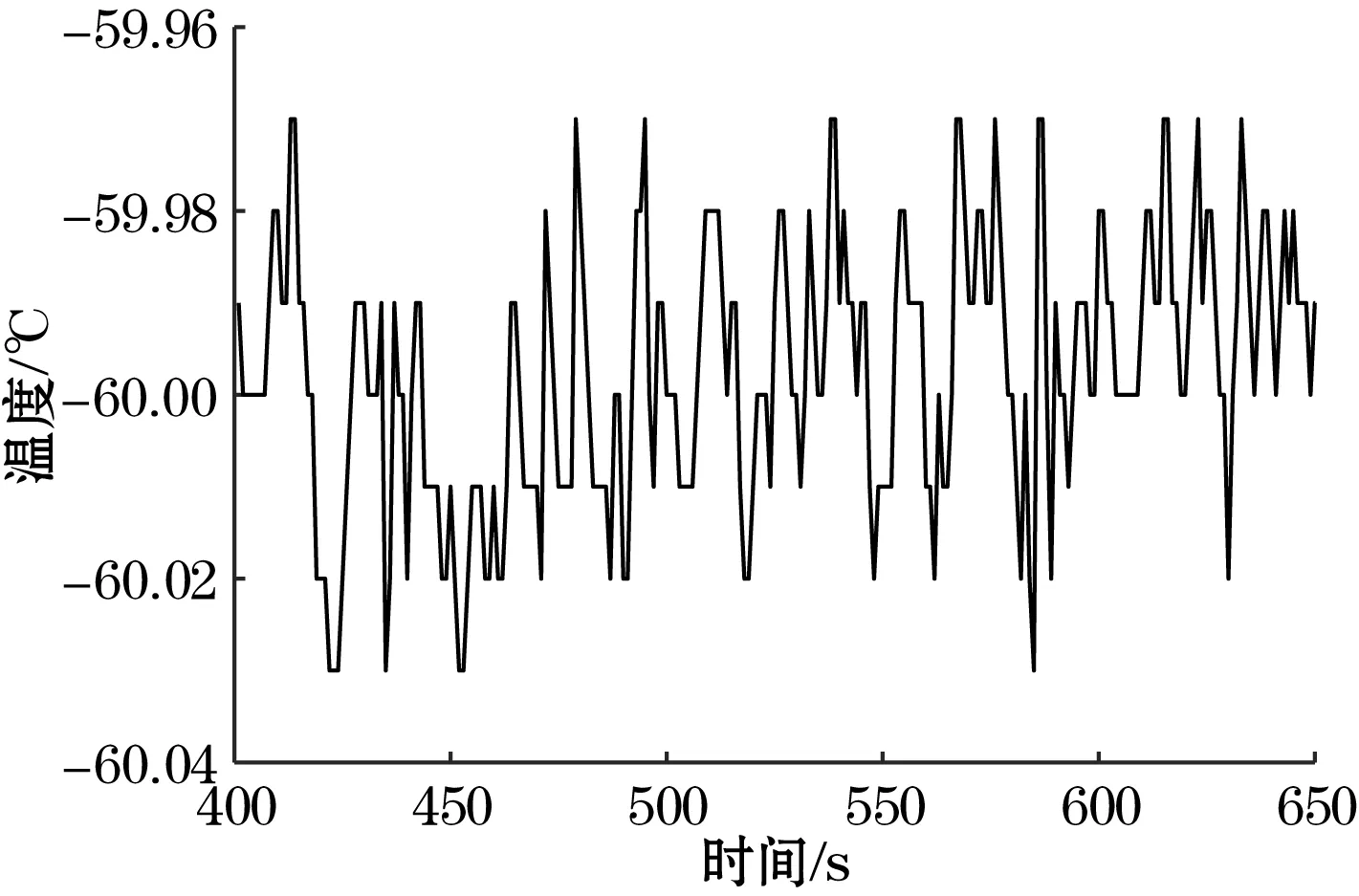
(b)-60 ℃控温精度
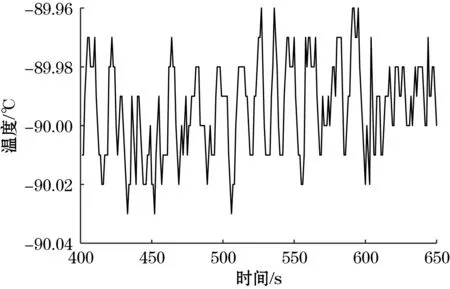
(c)-90 ℃控温精度图10 -30 ℃、-60 ℃、-90 ℃控温精度曲线图
由图9、图10可得,温控系统在-30 ℃、-60 ℃、-90 ℃的温度目标控制过程中,温度在150s内均达到稳定,降温与控制过程迅速,250s内误差均小于±0.05℃,系统温控稳定性较高,达到预期效果。
5 结束语
本文设计了一种以斯特林制冷机为散热装置的半导体制冷器温度控制系统,采用上下位机架构,选用高精度AD转换芯片进行温度采集,设计了安全可靠的TEC驱动电路,通过单神经元PID算法对温度进行控制。系统将斯特林制冷机与半导体制冷器的优点相结合,无需复杂的热端散热设计,相对传统散热方式,复合温度控制系统制冷能力强、控温精度高、调节速度快、体积小,对于快速低温发生仪器设计具有参考价值。
猜你喜欢
房地产导刊(2020年11期)2020-12-28
小哥白尼(军事科学)(2020年8期)2020-05-22
国际汉学(2020年1期)2020-05-21
NBA特刊(2018年17期)2018-11-24
中国新通信(2016年24期)2017-03-08
新世纪水泥导报(2016年1期)2016-07-01
铁道通信信号(2016年12期)2016-06-01
真空与低温(2015年4期)2015-06-18
真空与低温(2015年4期)2015-06-18
中国设备工程(2014年1期)2014-02-28