基于多模型估计的陀螺阵列故障检测方法
2019-12-09 07:00曾丽君
仪表技术与传感器 2019年11期
曾丽君,闵 芳
(南京航空航天大学金城学院信息工程学院,江苏南京 211156)
0 引言
硅微机械陀螺(micro electro-mechanical system,MEMS)是采用微机电系统技术设计出的微型惯性角速度传感器[1]。与高精度的激光和光纤陀螺相比,硅微陀螺主要应用在中低精度的惯性稳定平台和微惯性系统中。
由于硅微陀螺的成本较低,可采用多个陀螺组成阵列(也称为虚拟陀螺),采用数据融合方法提高陀螺的测量精度。例如,美国JPL实验室设计出的4陀螺阵列,其输出精度能够提高2~173倍[2]。对陀螺输出进行冗余测量,可获得陀螺的实时随机漂移。进一步对漂移数据进行补偿校正,经卡尔曼滤波可获得量测输出的最优估计[3]。针对陀螺阵列,已出现了采用平方根滤波[4]、粒子滤波[5]、滚动时域估计[6]等数据滤波和融合方法。
若陀螺阵列中的某一陀螺出现故障,将直接导致错误输出。常见的故障有恒值输出、输出噪声突然增大等。高精度惯性系统通常采用冗余传感器配置,根据冗余结构建立故障检测模型,采用极大似然估计实现对故障陀螺的检测[7]。在捷联惯导的多陀螺故障检测方面,有学者提出了基于广义似然比故障检测和线性估计相结合的故障检测与隔离方法[8]。上述研究都是针对特定的三轴正交的惯性系统结构而提出的陀螺故障检测方法,而不是针对单轴陀螺阵列的故障检测研究。多模型估计卡尔曼滤波是当系统模型未知或参数变化时,采用一组卡尔曼滤波器分别对应不同的参数集,以条件概率最大的参数集作为最优参数估计[9]。若建立陀螺阵列的系统模型,可采用多模型估计的方法解决故障陀螺的检测问题。基于条件概率最大进行故障检测的方法,已在容错飞行控制理论中获得广泛应用[10]。
本文首先建立陀螺阵列卡尔曼滤波系统模型。研究一种用于陀螺阵列故障检测的多模型估计卡尔曼滤波方法。在此基础上,针对陀螺输出噪声增大的故障,进一步研究通过增强模拟激励来提高故障检测的实时性,为后续进行快速故障隔离、防止错误输出的传播和积累研究提供参考。
1 硅微陀螺阵列的卡尔曼滤波
1.1 单个硅微陀螺的量测模型
硅微陀螺的随机输出误差包括零偏不稳定性、角速度随机游走(rate random walk,RRW)噪声和角度随机游走(angle random walk,ARW)噪声。可分别将硅微陀螺的零偏不稳定性建模为受白噪声驱动的RRW过程;将真实角速度信号建模为受白噪声驱动的ARW过程。因此,单个硅微陀螺的测量结果可以表示为
x=ω+b+v
(1)
式中:v为ARW噪声,即量测噪声;b为陀螺漂移;ω为被测角速度。
b可以表示为受强度为qb的白噪声驱动的随机游走过程:
(2)
其中,E[wb]=0;E[wb(t)wb(t+τ)]=qb·δ(τ)。
被测角速度ω可定义为一个受强度为qω的白噪声驱动的随机游走过程:
(3)
其中,E[wω]=0;E[wω(t)wω(t+τ)]=qω·δ(τ)。
1.2 硅微陀螺阵列的量测模型
采用陀螺阵列对同一外界动态信号进行冗余检测,再运用数据融合方法对测量结果进行处理,降低漂移对硅微陀螺测量的影响。在单陀螺量测模型的基础上,陀螺阵列的量测模型可表示为
(4)
式(4)中,量测噪声v=[v1,v2,…,vn]T是一个相关矩阵为R的连续时间δ相关过程,即:
E[v(t)vT(t)]=Rδ(τ)
(5)
当有角速度ω输入时,第i个陀螺的实际测量结果可表示为式(1)。而陀螺阵列对同一角速度进行测量,任意2个陀螺的测量结果的差分为
xi(t)-xj(t)=bi-bj+vi-vj
(6)
由式(6)看出,通过多个测量结果之间的差分,能够消除未知真实角速度对测量结果的影响。
1.3 含故障陀螺的陀螺阵列卡尔曼滤波
单陀螺的状态差分方程为
(7)
式中T为离散化周期。
当阵列中各陀螺的ARW噪声是互相关时,噪声v的相关矩阵Rn×n是一个与各陀螺间互相关系数有关的非对角阵。从而,陀螺阵列的卡尔曼滤波方程可表示为
(8)
式中:Φk|k-1=In×n;Γk-1=T·In×n;H=[I|1]∈Rn×(n+1);Wk为系统驱动的白噪声序列;Vk为量测噪声序列。
且有:
E(Wk)=0,cov(Wk,Wj)=E(W(t)WT(τ))=QkδkjE(Vk)=0,cov(Vk,Vj)=E(V(t)VT(τ))=Rkδkjcov(W(t),V(τ))=E(W(t)V(τ))=0
以4个陀螺组成的阵列为例,引入相关系数ρ来表征陀螺之间的相关性。滤波方程中,系统噪声序列的协方差阵Qk和量测噪声序列协方差阵Rk分别为:
检测到角速度ω时,通过同类传感器的冗余测量,间接获得陀螺的实时随机漂移。对漂移数据进行补偿校正,获得角速度输出最优估计。因此,以陀螺漂移为状态变量,以漂移信号的差分为量测信号,可建立陀螺阵列的卡尔曼滤波状态方程。
陀螺阵列中,若某个陀螺出现故障,这种故障可能表现为突然的恒值输出(包括零输出)或量测噪声的突然增大。可对量测方程中对应陀螺输出的矩阵行元素乘以因子λi1来表示恒值输出故障;对应陀螺的噪声量乘以因子λi2来表示量测噪声增大的故障。含故障陀螺的陀螺阵列卡尔曼滤波状态方程和量测方程分别为:
(9)
(10)
2 陀螺阵列的故障检测
2.1 多模型估计故障检测器设计
基于多模型估计卡尔曼滤波方法,对陀螺阵列进行故障检测器设计。正常工作状态下,卡尔曼滤波器对陀螺阵列输出进行数据融合,提高输出精度;而并行工作的故障卡尔曼滤波器获取残差,进一步通过故障检测器获得故障发生的概率。采用多模型估计方法的故障检测器设计如图1所示。

图1 陀螺阵列故障检测器设计
采用假设检验方法,根据每个卡尔曼滤波器的残差和误差协方差阵,设定每个陀螺故障的条件概率。系统状态向量的估计是每一个滤波器状态向量的加权和,权值是与其对应的故障条件概率:
(11)
(12)
其中,p(θi)在不同故障形式下概率相同,满足p(θ=θi)=1/n。将p(Yt|θ=θi)的时域分解成递推形式,经分析可得:
(13)
以陀螺的故障概率密度满足均值为0,方差为卡尔曼滤波器中误差协方差阵P的正态分布为例,概率密度表达式如下:
(14)

综上所述,故障事件θk发生概率的递推公式为
(15)
2.2 引入补偿激励的故障检测器设计优化
在通过多模型卡尔曼滤波方法求解获得故障概率后,可在算法中增加一种补偿激励机制以提高故障检测的实时性,其基本思路如下图2所示。

图2 引入补偿激励的故障检测器设计
根据上述结果判别是否产生故障。若已产生故障,则判断当前系统是否已加入补偿激励。若已增加,就可明确某个陀螺处于故障状态,并结合故障标识选择是否施加补偿激励,并触发对应的故障事件。
例如,系统中某陀螺发生故障时,故障概率p高于设定阈值,则控制标识位flag反转,检测系统根据判别故障类型施加补偿激励信号;若故障概率仍高于设定阈值,则flag再次反转,并且取消补偿激励,使系统恢复为正常运行状态。
3 陀螺阵列故障检测算法仿真分析
以4陀螺组成的陀螺阵列开展分析。正常输出情况下,经卡尔曼滤波数据融合后,应能显著降低陀螺输出误差。故障检测算法应能及时检测出故障陀螺。
3.1 含故障的陀螺阵列滤波结果
本文先后模拟了陀螺1在第12~16 s产生恒值输出故障;陀螺2在第18~23 s出现量测噪声增大的故障;陀螺3在第25~30 s出现恒值输出故障;陀螺4在第33~38 s出现噪声增大的故障,分别如图3(a)~(d)所示。试验假设故障概率为0.2。陀螺阵列数据融合结果如图3(e)所示。
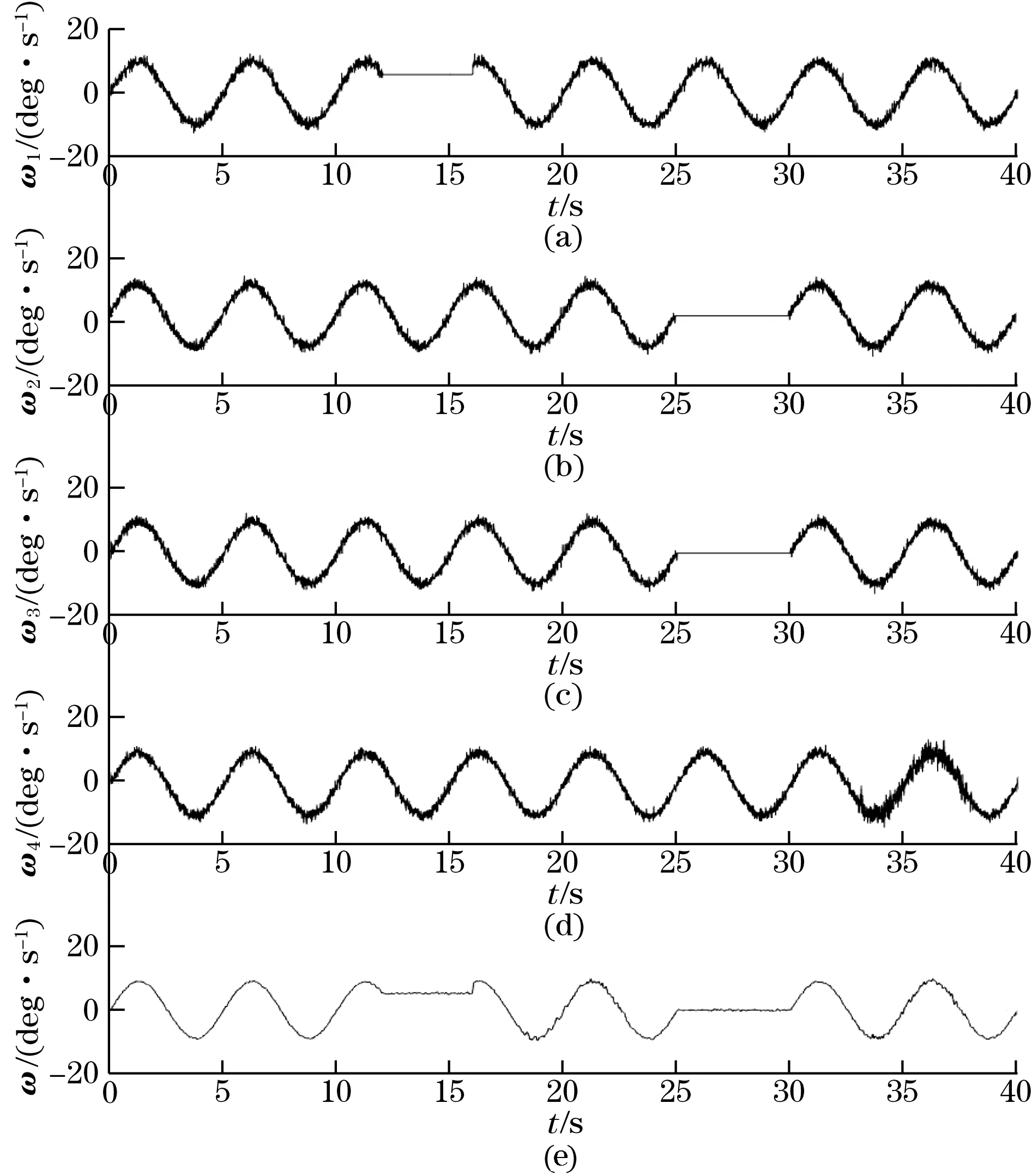
图3 陀螺阵列滤波结果和模拟故障后输出
可以看出,正常情况下通过卡尔曼滤波数据融合有效减小了陀螺阵列的输出误差。但出现恒值输出故障后,融合结果产生错误输出;当某个陀螺的量测噪声增大时,也造成融合结果误差增大。因此,故障检测算法要能迅速检测出故障陀螺,并将故障陀螺输出从算法中剔除。
3.2 陀螺阵列故障检测结果
考察基于多模型估计的故障检测算法能否准确识别陀螺故障,并进一步分析其故障检测延迟时间td1和恢复滞后时间td2。
实验结果如图4所示。由图4可以看出,故障检测算法能够准确判别发生故障的陀螺,但出现一定的检测延迟和恢复延迟。陀螺1在12~16 s内产生恒值输出故障,检测算法在13.2~17.7 s内报故障,故障检测延迟td1=1.2 s,恢复延迟td2=1.7 s;陀螺3故障类型与陀螺1相同,延迟量相当;而陀螺2和陀螺4的噪声增大故障的检测延迟和恢复延迟稍长,其故障特征没有恒值输出故障明显。

图4 陀螺阵列故障检测结果
3.3 引入补偿激励的陀螺阵列故障检测结果
引入补偿激励后的检测结果如图5所示。可以看出,施加补偿激励后,对恒值输出故障的检测实时性影响不大,但对量测噪声增大故障的检测延迟和恢复延迟显著减小。这是由于引入补偿激励后,故障陀螺的输出噪声被进一步劣化,使得检测器检测效率明显提高。

图5 加入补偿激励后的FDI检测结果
表1中列出了多模型估计故障检测算法(算法1)和进一步引入补偿激励后的改进算法(算法2)的检测性能比较。
4 结束语
在陀螺阵列的数据融合算法中,必须具备陀螺故障检测与隔离的有效手段。本文系统研究了一种基于多模型估计的陀螺阵列故障检测方法,主要完成了
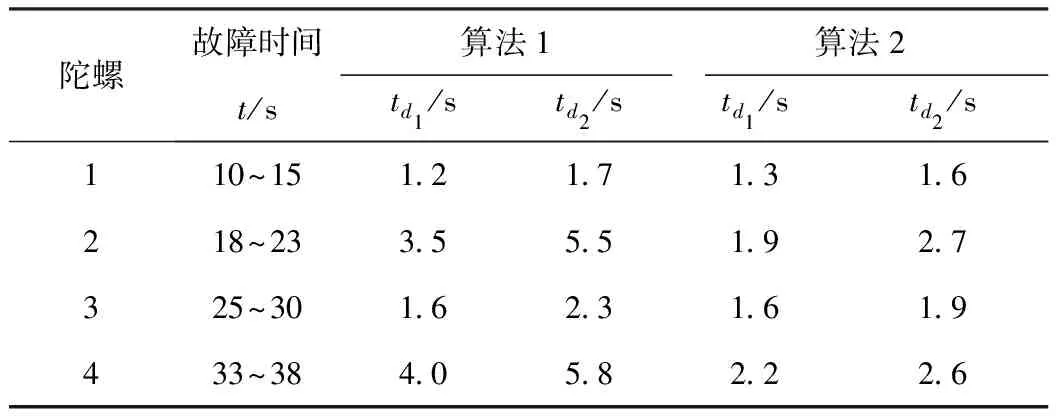
表1 FDI算法性能比较
以下工作:
(1)系统建立了陀螺阵列卡尔曼滤波数据融合算法框架,并通过4陀螺阵列的数据融合验证了算法的正确性。
(2)针对陀螺阵列故障,研究了一种基于多模型估计卡尔曼滤波的故障检测方法,能够实现恒值输出和噪声增大两种典型故障的检测。
(3)研究了一种引入补偿激励的故障检测改进方法。针对输出噪声增大故障,可显著缩短故障延迟和恢复延迟,提高检测实时性。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
电子制作(2019年23期)2019-02-23
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
北京航空航天大学学报(2017年9期)2017-12-18
中学生数理化·高一版(2017年3期)2017-07-08
中国惯性技术学报(2017年1期)2017-06-09
火控雷达技术(2016年1期)2016-02-06