基于空间变换的图像型火灾探测器坐标定位方法
2019-12-09 07:00陈学军
仪表技术与传感器 2019年11期
陈学军
(1. 莆田学院机电工程学院,福建莆田 351100; 2. 重庆大学输配电装备及系统安全与新技术国家重点实验室,重庆 400044)
0 引言
传统的火灾探测方式,在大空间建筑和空气流动性大的场所,特别在户外和野外环境下处于失效状态,不能满足消防探测要求。研究和解决降低大空间场合火灾危险,一直是人们关注的热点[1-2]。
随着电子视频技术的发展,采用视频图像检测火焰得到越来越多地研究。视频图像不受气流、环境等因素的影响,能够直观地通过图像识别火焰,从而确定是否有火灾发生。在视频火灾识别方面,国内外学者提出了诸多方法和算法进行视频火焰识别和探测,从而降低误报率[3-7]。在工程应用中,往往需要定位出火焰具体位置,如文献[8]在图像型火灾探测器质量检验试验中需定位出火焰空间坐标。然而,目前国内火灾视频探测技术还不完善,很多火灾视频探测器还存在不足,检测方法差别大,而且大多未对火焰坐标定位[9-10]。
视频摄像头通过感光元件将现实环境映射到二维平面,导致深度信息无法存在,要逆向求解现实世界坐标,不易于重构三维空间环境。对于视觉定位方法和研究,目前主要在机器人方面有针对性研究[11-14]。文献[15-17]提出了摄像机成像线性与非线性模型,给出了相应畸变补偿,运用算法解方程。这些均存在随着使用不同摄像机和安装方式,摄像机模型中的计算参数就要重新标定和校正,不利工程实际应用。为此,在研制的视频火灾探测器基础上,构建双目摄像头与现实世界空间坐标变换模型,实现空间坐标定位逆向求解,并考虑非线性畸变和双目视差,近似定位火焰世界坐标位置。
1 系统组成及其工作原理
系统由基于双波段红外视频火灾探测器和中控服务器端组成。而前者由双波段双目摄像头模块、视频采集处理模块、通信联动模块和中控服务器端组成,其原理框图如图1所示。
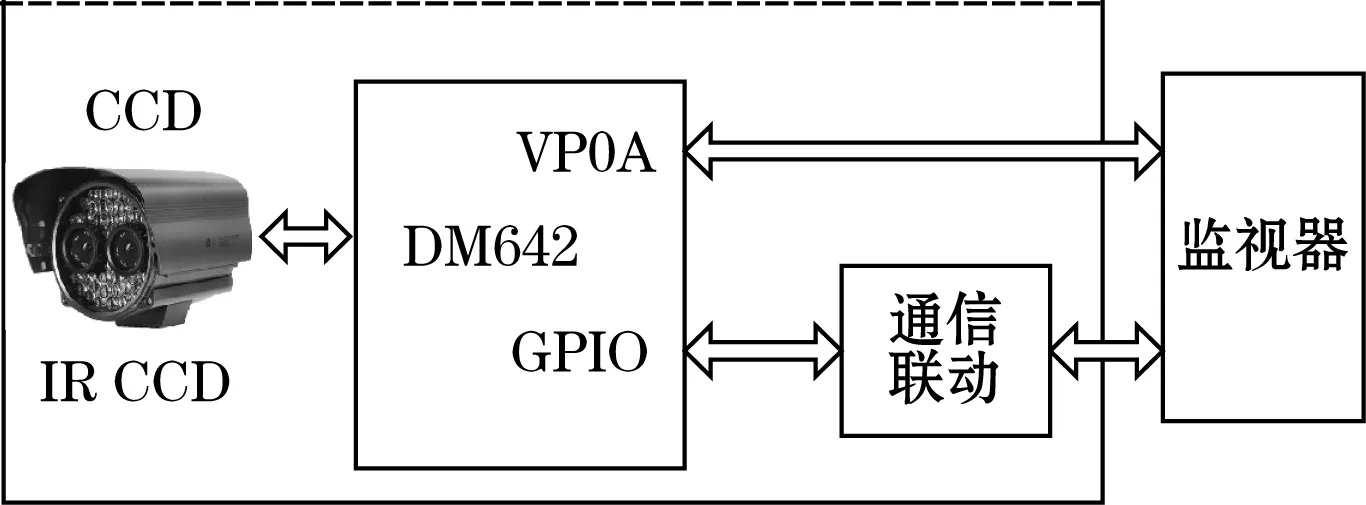
图1 基于双波段火灾探测器系统原理框图
双波段双目摄像头模块包含了双目摄像头和特制光学结构。其中一目摄像头直接用于采集实际火焰场景图。另外,考虑到太阳光源以及火焰在红外光谱段的差异,特制以4 250 nm左右滤光光学结构作为另一目红外IR CCD透射光范围,来采集火焰灰度图像。采用DM642对采集到的视频图像进行火焰识别,运用算法定位火焰中心坐标位置,并将融合定位信息的视频信号输出到中控服务器端;一旦有火情,经通信联动模块启动中控火警。
2 空间坐标变换模型
双波段红外视频火灾探测器的最终目的是实现火焰定位坐标。为此,最基本是提取视频图像中的火焰空间位置、形状等几何信息。然而摄像机采集到的图像是二维信息,这就存在一种三维到二维空间的映射关系。涉及到几种不同坐标系相互变换,通过确定三维世界坐标系与像素坐标系的相互关系计算火焰空间位置坐标。
摄像机空间成像可以用4个坐标系变换来描述,其包括世界坐标系(Ow-Xw-Yw-Zw)、摄像机坐标系(Oc-Xc-Yc-Zc)、成像平面坐标系(o-x-y)和像素坐标系(o1-u-v),它们之间示意图如图2所示。
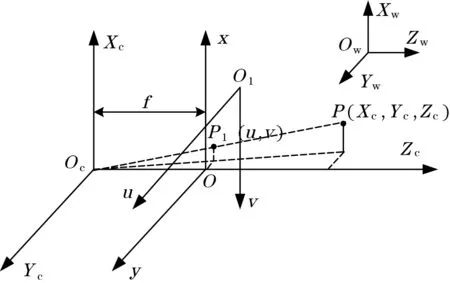
图2 摄像机成像空间坐标变换示意图
世界坐标系即为现实世界坐标,表征成像对象在现实世界中三维空间坐标系,根据具体情况而定。摄像机坐标系以镜头光心Oc作原点构建三维坐标系,其XcYc在焦平面上,与xy成像平面平行,并且zc轴重合于光轴,OcO是摄像机焦距f。xy成像平面坐标系单位为物理量,而uv像素坐标系以像素为单位。
现实世界三维空间Pw=(Xw,Yw,Zw)投影成像到二维uv像素坐标平面上P1=(u,v),需经过图2中的坐标系进行相互变换,其步骤如下。
2.1 世界与摄像机坐标系相互变换
世界坐标系与摄像机坐标系的相对位置和姿态可由旋转矩阵R和平移向量T来确定,如表达式(1)所示。
(1)
式中:(Xc,Yc,Zc)为Pw变换到摄像机坐标系(Oc-Xc-Yc-Zc)中的坐标;R为3×3旋转正交矩阵;T为3×1平移向量,两者决定了摄像机和世界坐标系的关系;OT=(0,0,0);M为4×4的矩阵。
2.2 摄像机与成像坐标系相互变换
在摄像机坐标系,任取一点P(Xc,Yc,Zc),其投影在成像坐标系的坐标为P1=(x,y)。它是P点与光心Oc连线和成像坐标面相交的交点。它们之间对应关系见图2,表达式为
(2)
而式(2)可用齐次矩阵表示为
(3)
2.3 成像与像素坐标系相互变换
将成像坐标系与像素坐标系建立在同平面上,如图3所示。
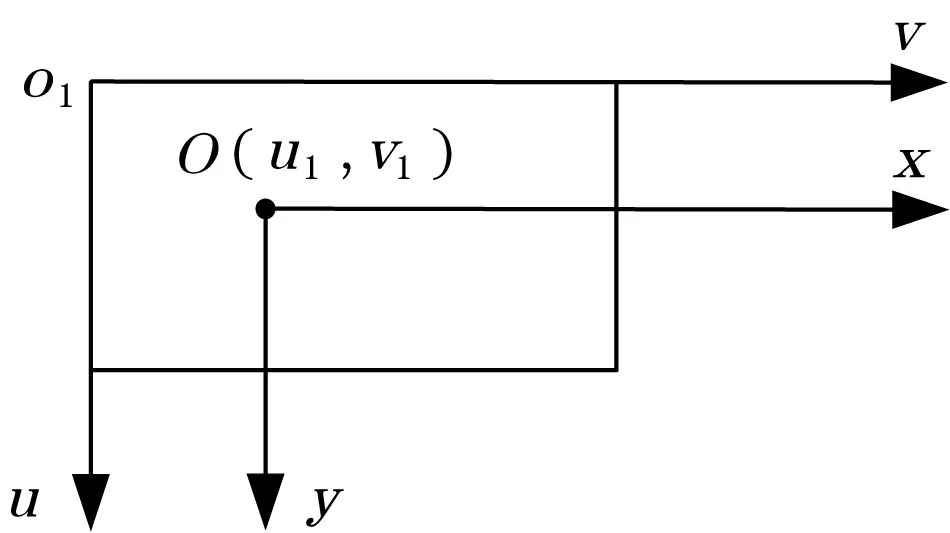
图3 成像与像素坐标系之间关系图
成像坐标系以光轴为坐标原点;而像素坐标系以平面左顶角为坐标原点,它们之间关系可用式(4)确定。
(4)
式中:(u,v)为成像点位于像素坐标系中的像素坐标;dx、dy为每个像素位于成像坐标系x、y轴方向上的单位长度;(u1,v1)为成像原点坐标位于像素坐标系中的具体坐标。
2.4 坐标系空间变换
基于上述的世界坐标系(Ow-Xw-Yw-Zw)、摄像机坐标系(Oc-Xc-Yc-Zc)、成像平面坐标系(o-x-y)和像素坐标系(o1-u-v)之间的两两变换关系,易求已知世界三维中任一点映射到摄像机像素二维空间的坐标。联立式(1)、式(3)和式(4),可以得到:
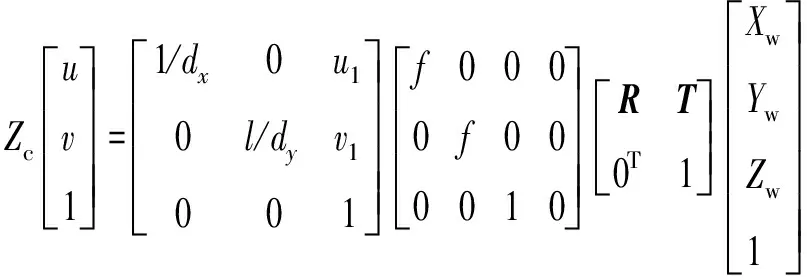
(5)
式中:u1、v1、f仅与摄像机结构有关,称为内部参数;R和T与摄像机和世界坐标系相对位置有关,称为外部参数;N包含了摄像机内部和外部参数,称为投影矩阵。
3 现实定位坐标求解
3.1 空间坐标变换逆问题
对于研制的双波段红外视频火灾探测器可通过视频处理方式获取火焰成像质心像素坐标,而报警输出应显示现实世界坐标,这就需要对式(5)进行逆向求解。而从式(5)可知,N为不可逆。因此,当成像点是已知时,仍无法计算它的现实世界坐标点。为此,假如参考平面位于世界坐标系的Z=0平面上,即仅考虑平面坐标成像,忽略Z坐标参数,可得到式(6)。此时,N1矩阵则可逆,利用成像平面的像素坐标即可求出现实世界坐标系中点的二维平面坐标,达到符合火灾探测器标准要求。

(6)
式中:R1为2×2旋转正交矩阵;T1是2×1平移向量,摄像头光轴处于世界坐标系中的位姿由这两个参数确定;OT=(0,0);N1为3×3的矩阵。
3.2 非线性校正模型
因摄像机制造工艺存在的缺陷和误差等原因导致畸变,这将无法使用上述线性模型表示成像关系,应解决非线性畸变。在实际应用中,往往各个摄像机存在的问题不一样,且不可确定,在精度要求可满足的情况下,即可略忽不计。而文中提起应用于火灾探测器,在现实世界坐标逆向求解时,如果标定平面在世界坐标系的Z=0平面上,而实际往往摄像机的安装均存在一定的角度,势必造成真实平面与求解平面存在一定的角度θ,如图4所示。为此,应考虑因安装角度产生的非线性畸变。
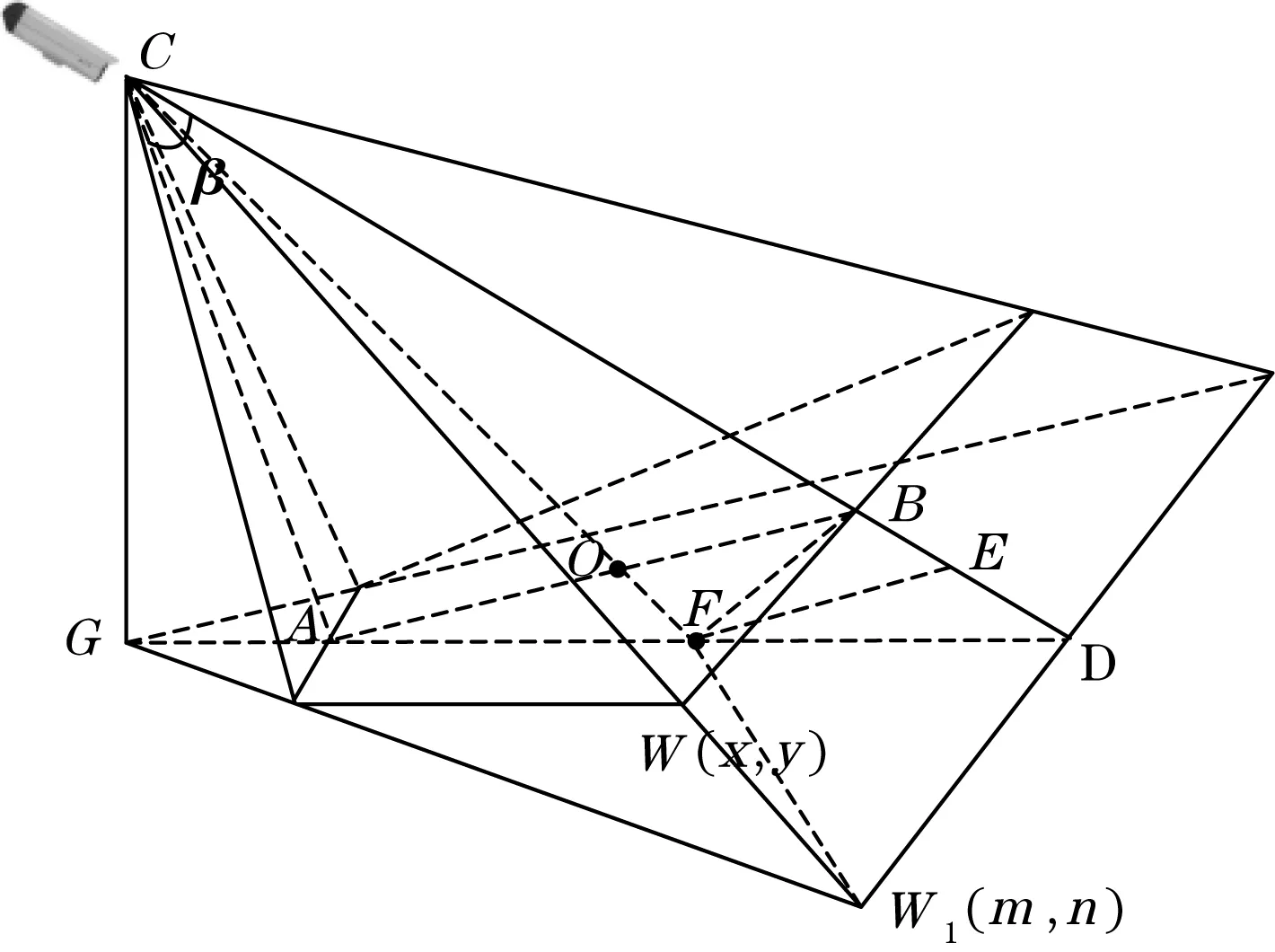
图4 安装与探测区域示意图
图4中,CG为摄像机的安装高度,直线COF为光轴,平面ABW垂直于光轴交于O点且其为上述空间变换模型所在的物平面。而实际上平面ADW1才为世界空间物平面,视角∠ACD=β。假设点W(x,y),则点W1(m,n)才是空间世界物点位置。
通过三角几何关系,OB/FE=CO/CF,则
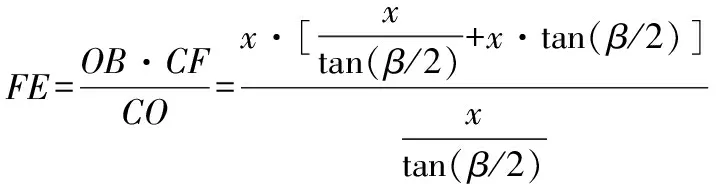
(7)
在△DEF中,根据正弦定理有FD/sin(∠FED)=EF/sin(∠EDF),则
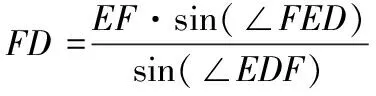
(8)
同理,推导DW1可得:
(9)
真实平面与求解平面上对应点之间的坐标关系可以近似表达成如式(7)和式(9)所得。
3.3 双目视差
因研制的双波段红外视频火灾探测器采用双目摄像头,其视觉如同人的2只眼睛。落入视角的同一个对象,在两个视角的成像坐标会存在偏差。构建双目视差模型如图5所示。在图5中,f是摄像头焦距,B为双目摄像头之间的中心距离,O(X,Y,Z)是现实世界坐标系中的一点坐标。假设图像中心在摄像机光轴上,并且有一个摄像头坐标系与世界坐标系合在一起,摄像头的成像平面平行于世界坐标系,则Q点在双目摄像头平面坐标系的位置分别为(x1,y1,z1)、(x2,y2,z2),其中z1=z2=z。
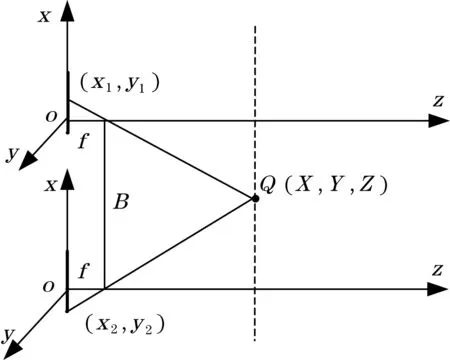
图5 双目成像视差示意图
当摄像头1与世界坐标系重叠在一起,则空间点Q的X坐标如下:
(10)
当摄像头2与世界坐标系重叠在一起,则空间点Q的X坐标如下:
(11)
则双目摄像头的坐标系中心距离B存在如下关系:
X1=X2-B
(12)
联立式(10)、式(11)、式(12)求解,可得:
(13)
在应用中,便于检测和对比,使用摄像头参数相同,故f1=f2,则式(13)可转化为
(14)
式(14)中,令D=x2-x1,称为视差。当物体与摄像头距离Z、焦距f、基线B和视差D确定时,则可计算在视差下的世界坐标值。在应用时,双目分别检测,故最后世界坐标可近似为X=(x1+x2)/2,Y=(y1+y2)/2。
4 实验与分析
根据坐标变换求解模型,试验之前应确定摄像头视角和两个摄像头的基线长度,安装过程确保两个摄像头的X轴和Y轴重合。采用PAL制式摄像头,像素为720×576,焦距f为6 mm,基线B为3.6 mm,水平α为42°, 垂直β为32°,安装高度为4 m。在火灾探测器前方25 m处布置试验火盘,其尺寸大小为0.250 mm×0.250 mm,并使试验火盘处于摄像机视角内,具体如图6(a)所示。点燃火盘,待火焰稳定后,再执行二级防火操作,并记录火灾坐标值。其中,表1为试验定位火焰三组坐标值,试验定位坐标与实际坐标值对比结果为|ΔX|≤0.21 m,|ΔY|≤0.37 m,满足设计和文献[8]要求。以同样的方式,缩小试验燃烧盘大小,作用尺寸为0.060 mm×0.060 mm烧盘进行一级防火操作试验,试验结果同样满足设计要求。同时,并有报警联动信号输出,从点燃烧盘到发出声报警的响应时间小于10 s。

表1 摄像机像素和世界坐标之间关系的试验数据结果
另外,为了方便试验调试程序和摄像机标定,文中以蜡烛和打火机的火焰作为识别源。该火灾探测器的其中一目彩色摄头采集到地火焰效果如图6(b)所示。其核心DM642运用火焰识别算法对双波段视频图像分析处理和识别,并基于文中提到的坐标变换模型将定位的火焰坐标与彩色视频融合输出至消控中心,其火焰定位效果如图6(c)所示。该火灾探测器可分辨火焰的最小成像尺寸是2×2像素。

(a)试验示意图

(b)火焰彩色图

(c)火焰中心定位图
该试验表明,基于文中提出的空间变换方法可识别火焰并定位中心坐标,同时又能联动火警;平时无火情时,又可用于安防视频监控,能满足工程多功能应用。
5 结论
研制的双波段红外视频火灾探测器采用坐标变换逆求解模型实现定位火焰世界坐标系中位置,虽然在畸变和视差进行了近似求解,但试验定位坐标与实际坐标值对比结果为|ΔX|≤0.21 m,|ΔY|≤0.37 m,误差满足设计和国标要求,且报警响应小于10 s。目前,已有一些基于传统线性模型和非线性求解算法,但是对于摄像机的标定要求较高,受限于每一台摄像机参数,不利于工程应用推广。而采用本文提起的方法计算量小,定位误差小。一旦摄像机确定,计算参数和标定不随安装方式等变化,工程现场安装不用过多调试,易于实现,即可保证定位精度要求。此外,该火灾探测器可实时输出视频,无火情时作为安防监控。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
音乐天地(音乐创作版)(2022年1期)2022-04-26
汽车工程师(2021年12期)2022-01-18
学苑创造·A版(2021年2期)2021-03-11
动漫星空(兴趣百科)(2019年5期)2019-05-11
学与玩(2017年6期)2017-02-16
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
汽车维修与保养(2015年8期)2015-04-17
新闻前哨(2015年2期)2015-03-11