用于测量世界时的大型光纤陀螺仪的噪声分析∗
2019-12-10 11:58王惜康高玉平孙中苗
天文学报 2019年6期
王惜康 高玉平 孙中苗
(1 西安测绘研究所地理信息工程国家重点实验室西安710000)
(2 中国科学院国家授时中心西安710600)
(3 中国科学院时间频率基准重点实验室西安710600)
(4 中国科学院大学北京100049)
1 引言
光纤陀螺仪是一种可以精确测量旋转角速度的惯性测量仪器.与地球固联的大型光纤陀螺仪在随地球自转运动的过程中可以实时测量地球瞬时自转角速度, 通过建立地球自转角速率与世界时(UT1)的对应转换关系可以实现高时间分辨率UT1参数的测量解算工作.当前国际上瞬时地球自转角速度测量灵敏度最高的光学陀螺仪是德国的“Gross-Ring”大型激光陀螺仪, 该陀螺仪环形激光器面积达到16 m2, 该陀螺仪可以综合1 h的原始测量数据实现对地球瞬时自转角速度的测量精度达7×10−14rad·s−1[1–2].利用该测量数据理论上可以实现0.01 ms日长变化的解算精度.这说明大型光学陀螺仪有潜力发展成为一种新的UT1测量方法.
光纤陀螺仪在实际测量过程中, 受光源以及光电探测元件等的影响, 使得陀螺仪测量数据中不可避免存在噪声, 这些噪声会影响光纤陀螺仪测量地球自转角速度的精准度以及稳定性[3–4].同时, 测量数据中除了包含噪声的影响外, 还包含一些来自测量环境影响而产生的变化频率较高的误差项.本文一方面结合光纤陀螺仪实测数据, 分析数据中的噪声对解算UT1产生的影响, 利用Allan方差评估实验光纤陀螺仪的噪声水平[5], 并结合分析结果提出消噪的方法; 另一方面, 对测量数据进行功率谱分析, 分析测量数据中存在的高频变化数据的影响, 初步确定出高频变化数据的可能来源, 并结合分析结果给出改善方案.最终的分析结果可以对后续进行大型光纤陀螺仪的改进以及相关数据处理方法的建立提供重要的参考.
2 噪声功率谱密度与角误差的关系
UT1与地球自转角存在线性函数关系, 通过对光纤陀螺仪输出的地球自转角速度积分则可得到地球自转角.在实际测量过程中, 光纤陀螺输出的测量数据中不可避免地会包含噪声的影响, 其输出的每一个地球自转角速率测量值Ω(t)可以看成真实的角速率值Ω0(t)与一个噪声Ωn(t)的叠加[6]:

其中, 光纤陀螺仪输出测量数据中的噪声主要呈现为白噪声, 即对0–t时间段的角速率Ω(t)进行数值积分, 则得到该段时间内的地球自转角θ(t),θ(t)同样也可以表示为真实的地球自转角θ0(t)叠加一个由噪声积分引起的角误差θn(t), 即

由于Ωn(t)具有随机性, 积分引起的角误差θn(t)同样具有随机性,θn(t)会对最终的UT1解算结果产生影响.而角误差θn(t)的方差可以表示为


将(4)式代入(3)式可以得到

其中,δ为δ函数,SΩ(f)为光纤陀螺仪输出数据中的噪声功率谱密度(PSD),f为噪声的频率, 可以表示为

其中,A为单位带宽的噪声振幅.由(5)式可知, 当ξ=ζ时, Ωn(ξ)和Ωn(ζ)不相关, 因此可以得到

通过(6)式和(7)式可以得到, 光纤陀螺输出的角速率经过积分累加后, 产生的角误差的标准差为

由上式可以得出, 角速率经过积分得到的角误差的标准差与积分时间的平方根成正比,其比例系数与对应噪声的功率谱密度有关.通过(8)式可以对光纤陀螺仪输出数据中包含的噪声在积分后产生的角误差大小进行估计.
3 光纤陀螺噪声的Allan方差分析
Allan方差是评价光纤陀螺仪各类误差和噪声特性的一种重要手段[7], 光纤陀螺仪测量数据中噪声的功率谱密度SΩ(f)与Allan方差之间存在关系[8]

式中,τ为数据采样时间.(9)式表明Allan方差与陀螺仪总的输出噪声功率成正比, 利用Allan方差分析产生噪声的随机过程的特性, 可以从数据中识别并量化出各项噪声.光纤陀螺仪的噪声通常用角随机游走系数表示, 其主要来源是光源的相对强度噪声、探测器的散粒噪声和电噪声等频率较高的一些噪声项, 噪声在测量数据中表现为短期的随机变化, 使陀螺仪的测量值偏离真值.角随机游走系数用N表示,N值越小表示陀螺仪测量数据中的噪声越小.N与Allan方差的关系为

当给定陀螺的工作状态, 角随机游走系数在σ(τ)–τ的双对数坐标系中对应着斜率为−1/2的一段曲线.
4 光纤陀螺仪实测数据的分析
4.1 光纤陀螺仪测量数据中的噪声影响分析
实验分析数据来自国家授时中心的光纤陀螺仪实验平台, 实验所用光纤陀螺仪的光纤环直径D=40 cm, 光纤总长L=30 km, 光纤陀螺仪采用平均波长为1550 nm的放大自发辐射光源, 陀螺仪采用双偏振双端口设计.该设计可以在有效抑制光纤过长引起的温度梯度效应的基础上, 最大程度减小光纤环平面的面积, 通过多匝光纤环绕的方式达到放大地球自转产生的Sagnac效应的目的.光纤陀螺仪水平放置在位于陕西蒲城的地下独立实验室(109.35◦E, 34.95◦N)的水平测量平台上, 为了尽可能避免外部环境对陀螺仪测量产生的干扰, 整个测量装置保持在恒温、恒湿的密闭环境中.同时在测量平台的不同位置安放有高精度电子水平仪, 以实时监测平台的倾斜变化情况, 该光纤陀螺仪测量系统经过初期的调试, 现已稳定运行, 初步实现了对地球自转角速度的测量.如图1所示,为2018年12月4日00:00:00—2018年12月6日23:59:59时间段的陀螺仪原始测量数据, 该测量数据的采样频率为100 Hz, 在采集时间段内连续不间断测量, 数据以旋转角速度的形式输出(单位: rad·s−1).
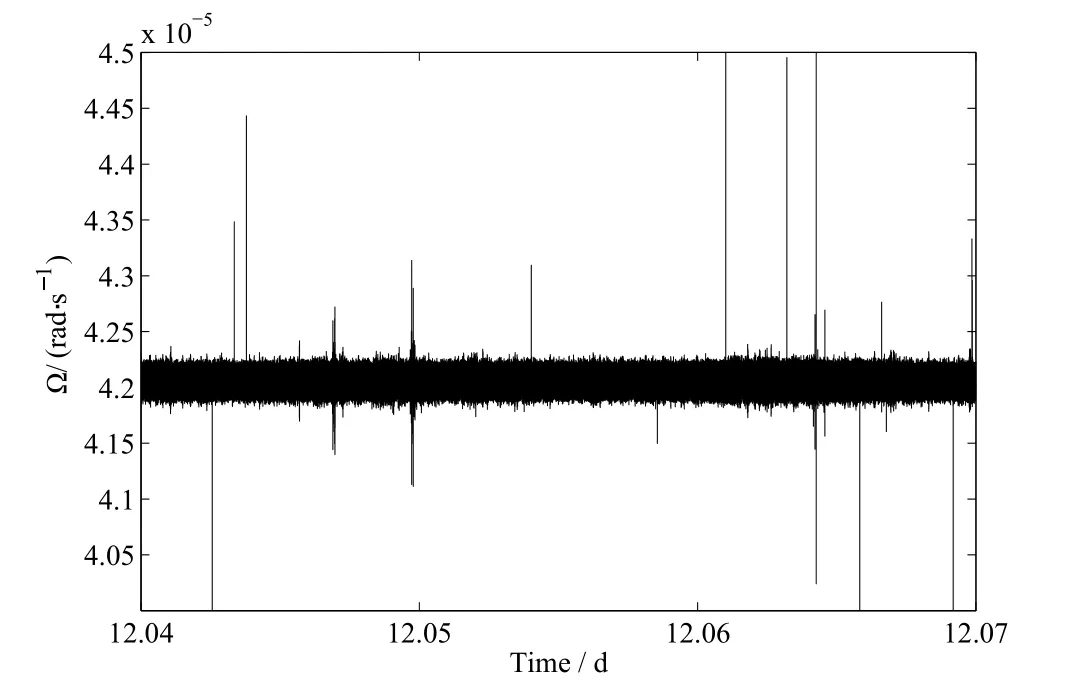
图1 光纤陀螺仪的原始数据Fig.1 The raw data of the fiber optic gyroscope
利用数据分析软件Stable32 Version分析图1中的测量数据, 相应的Allan方差结果如图2所示.对于高时间分辨率UT1参数的解算, 测量数据中频率较高的噪声对最终计算结果的影响更显著, 因此通过利用最小二乘拟合的方法可以计算出该光纤陀螺仪的角随机游走系数约为N=4.2×10−9rad·s−1·Hz−1/2, 该系数反映了测试数据的噪声水平, 依据(8)式可以计算出光纤陀螺仪测量数据中的噪声在经过1 d的积分运算后产生的角误差会达到1.4697×10−6rad (约为0.3031′′).如果要求利用光纤陀螺仪测量数据解算UT1参数的精度达到1 ms/d (即对应于1 d内角速度积分后产生的角误差需要小于0.015′′), 结合实测数据的计算结果对比说明光纤陀螺仪的噪声对UT1参数的影响是不可忽略的, 在利用陀螺仪测量数据计算UT1参数之前, 需要对测量数据进行降噪处理以减少噪声带来的影响.
由于光纤陀螺输出数据的噪声主要来自于光路或光电检测过程中探测器的散粒噪声、电噪声等频率较高的噪声项, 这些噪声均具有白噪声的统计特点.图2显示的Allan方差分析曲线还反映了光纤陀螺仪包含的不同频率的噪声在不同平均时间下的变化情况.在平均时间小于5 min时, 影响光纤陀螺仪测量数据的主要是噪声中的高频项, 并且高频项会随着平均时间的增加而逐渐减小; 当平均时间达到5 min时,噪声的影响可以降至最低, 此时所得数据反映地球自转角速度变化的精度可以提高到3.5×10−10rad·s−1; 当平均时间逐渐增加超过5 min后, 噪声中的一些低频项的影响将逐渐显现.
4.2 光纤陀螺仪测量数据中的高频振动影响分析
光纤陀螺仪测量数据中除了包含因光路和光电探测器引起的噪声外, 还包含一部分高频变化的影响, 其产生原因主要与测量环境中存在的高频振动源有关.图3所示是光纤陀螺仪原始测量数据的功率谱密度曲线, 该曲线在0.1–0.6 Hz和2–10 Hz两个频段出现了两个明显的凸起, 该变化并不符合白噪声功率谱密度的表现, 说明光纤陀螺仪检测到的对应两个频段内的功率谱密度变化并不是来源于噪声.
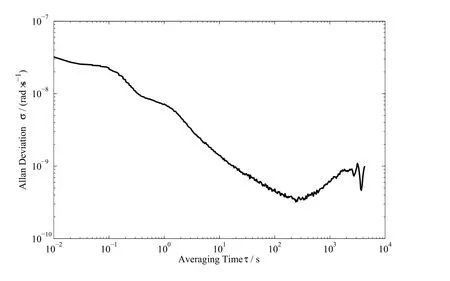
图2 光纤陀螺仪数据的Allan方差分析曲线Fig.2 The Allan variance analysis curve of the data from the fiber optic gyroscope

图3 光纤陀螺仪原始数据的功率谱密度分析结果Fig.3 The PSD analysis curve of the raw data from the fiber optic gyroscope
为了探究存在于光纤陀螺仪测量数据中高频变化的可能来源, 我们将1 d内不同时段的测量数据分别做功率谱密度分析, 得到如图4所示的分析结果.分析结果显示测量数据中的0.1–0.6 Hz频段的变化主要出现在1 d中的08:00:00—18:00:00之间, 而2–10 Hz频段的变化在1 d中任意时段均可测量到, 并且变化幅度不随时间的推移发生明显改变.
通过分析可以得出, 测量数据中包含的0.1–0.6 Hz频段的变化具有周日变化的特点,并且该频段变化出现的时间与人们的生活作息时间存在较强关联性.由于地面人为活动以及测站周围的交通等通常会使地面产生频率在0.1–100 Hz之间的振动[9], 该振动会随着传播距离的增加而不断衰减, 其中高频率的振动衰减较快, 而频率相对较低的振动则衰减较慢, 可以传播较长的距离, 结合实测数据分析得出, 只有频率处于0.1–0.6 Hz的地面振动能够传播到地下实验室而被光纤陀螺仪所感知.因此初步推断0.1–0.6 Hz频段变化是因地面人为活动以及周围的交通产生的地面振动传导至陀螺仪测量平台所致.除了0.1–0.6 Hz频段变化外, 数据中的2–10 Hz频段的变化在1 d中任意时段均可测量到, 其振幅变化与时间没有关联性.结合光纤陀螺仪实际测量环境, 除了数据采集室, 在测量平台周围不存在其他可能的振动源, 因此初步推测测量数据中该频段高频变化来源为光纤陀螺仪采集系统工作时产生的轻微振动通过地面传播至光纤陀螺仪测量平台而产生的影响.
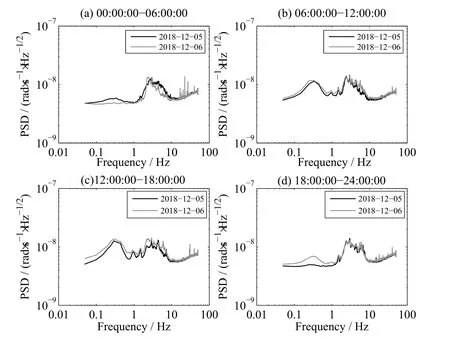
图4 1 d中不同时段的原始数据的功率谱密度分析结果Fig.4 The PSD analysis results of the raw data at different times in one day
由于原始测量数据可以看作各个不同频段的变化数据相互叠加的结果, 可以利用带通滤波器将处在各频段的测量数据分别提取后进行单独分析, 因此图5显示的是任意截取原始测量数据中的一段时长为6 h的测量数据, 并利用带通滤波器分别提取处在0.1–0.6 Hz频段和2–10 Hz频段的变化数据, 并分析两个频段的高频变化数据在5 min平均下的振幅变化情况.首先利用滑动平均的方法对5 min内的数据计算滑动平均值, 取滑动步长为0.5 min, 再对计算所得的滑动平均结果间隔5 min求取算术平均值,得到如图6所示的结果.图中显示出两个频段的高频变化数据经过5 min平均后振幅均降至5×10−11rad·s−1以下, 该振幅小于实验所用光纤陀螺仪在5 min滑动平均下的最优测量精度3.5×10−10rad·s−1, 该结果说明了通过间隔5 min平均的方法可以有效抑制测量数据中的高频变化数据.
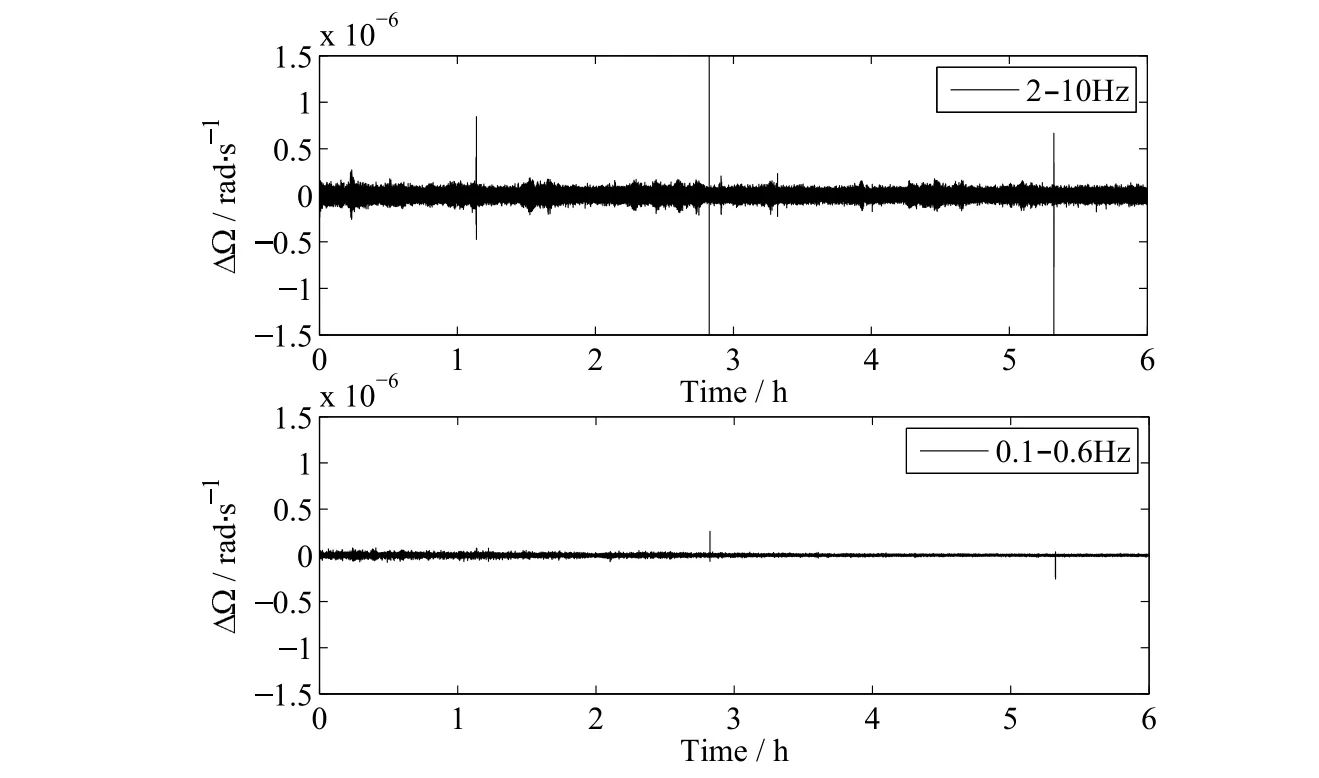
图5 原始数据在2–10 Hz频段以及0.1–0.6 Hz频段的带通滤波结果Fig.5 The raw data in 2–10 Hz and 0.1–0.6 Hz frequency bands after band-pass filtering
通过以上分析证明, 光纤陀螺仪的测量数据中0.1–0.6 Hz频段和2–10 Hz频段的高频变化数据可以在数据处理中通过滑动平均的方法予以有效抑制.在利用光纤陀螺仪测量数据每间隔5 min解算一次UT1参数时, 高频变化数据对解算结果的影响很小, 依据UT1的基本定义[10–11], 利用间隔5 min平均消噪后的数据可以使相隔5 min计算并输出一次UT1参数的解算精度达到2 ms.
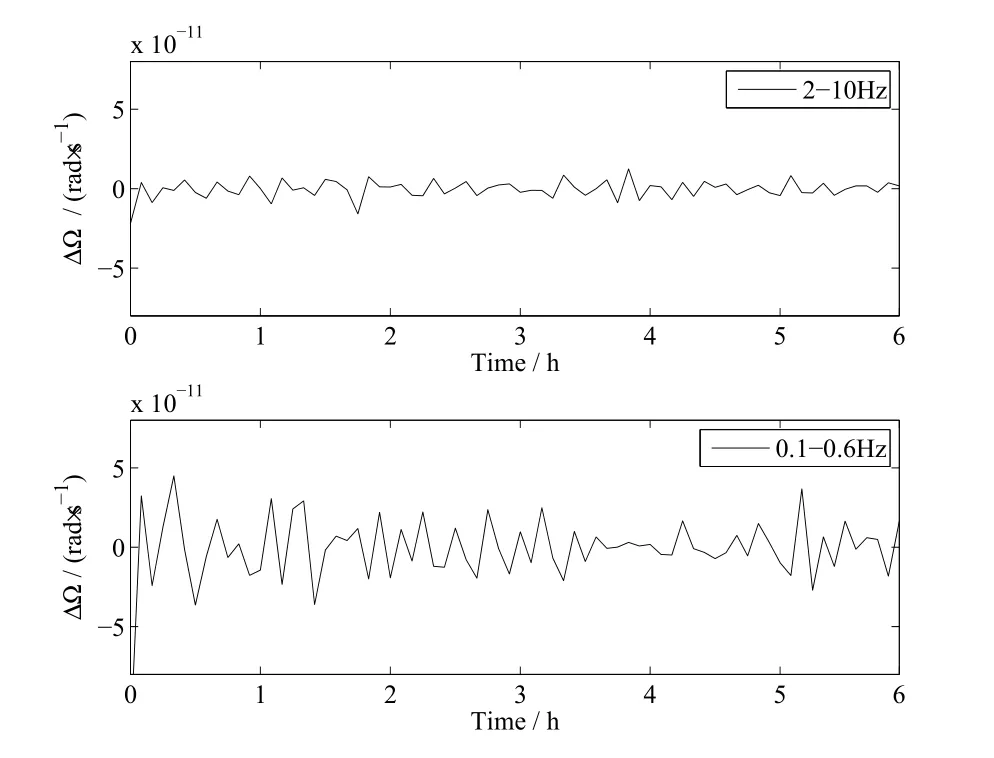
图6 2–10 Hz频段以及0.1–0.6 Hz频段变化数据的间隔5 min平均结果Fig.6 Interval 5 min average results of the data in 2–10 Hz and 0.1–0.6 Hz frequency bands
5 总结与展望
目前大型光纤陀螺仪的原始测量数据中既包含来自光源以及光电探测仪器等的噪声, 也包含来自测量环境中高频振动的影响.对于利用大型光纤陀螺仪测量UT1的实验来说, 光纤陀螺仪所包含的噪声通过积分后产生的角误差会达到0.3031′′, 说明噪声对高时间分辨率UT1参数解算的影响是不可忽略的, 同时来自测量环境中的高频振动同样会对陀螺仪的测量数据产生影响.通过对光纤陀螺仪实际测量数据进行分析可以得出,光纤陀螺仪的噪声和测量环境中的高频振动对测量数据的影响可以在后续数据处理过程中采用积分平均的方式有效消除, 平均时间选取5 min为最优.在5 min平均的情况下可以使大型光纤陀螺仪对地球自转角速率的测量灵敏度达到3.5×10−10rad·s−1, 这样可以使每隔5 min利用陀螺仪测量数据解算得到的UT1参数的精度达到2 ms, 从而提高了UT1参数解算的时间分辨率.随着陀螺仪测量环境的不断改善以及陀螺仪性能的不断提高, 利用大型光纤陀螺仪测量数据解算高时间分辨率UT1参数有潜力成为一种新型的UT1参数测量方法.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
家庭影院技术(2020年1期)2020-06-24
航天电子对抗(2019年4期)2019-12-04
家庭影院技术(2019年4期)2019-04-17
家庭影院技术(2018年9期)2018-11-02
百科探秘·航空航天(2017年9期)2017-12-31
电子制作(2017年13期)2017-12-15
百科探秘·航空航天(2017年9期)2017-11-07