基于事元理论的机械运动系统行为知识表示研究
2019-12-16 06:56郑震霆杨春燕
广东工业大学学报 2019年6期
郑震霆,杨春燕
(广东工业大学 1. 可拓学与创新方法研究所;2. 机电工程学院,广东 广州 510006)
概念设计是整个产品设计过程中最初,也是最重要的阶段之一. 研究人员对概念设计的理论与方法做了大量的研究. 其中以基于功能的设计方法的研究居多,研究的内容包括需求分析、功能抽象、功能分解、行为映射、方案生成以及方案评估等方面.“行为”作为连接功能与结构的桥梁,可以使设计人员获得对设计问题的更深层次理解,并获得更合适的设计方案[1].
文献[2]总结了机电产品功能和行为的几种表达方法,并将行为的表达方法归纳为“输入-输出流表达法”、“物理状态变化表达法”以及“自然语言语句表达法”3大类;文献[3-6]认为行为与产品的物理状态之间的存在关系. 他们普遍认为行为随着运动过程中物理状态的变化而变化,因此行为实质是一个动态的变化过程;相反,文献[7-10]则认为行为是产品在实现预期功能时所表现的外在特征,是属于其物理状态的保持,文献[11]运用FBS(Function Behavior Structure),即“功能—行为—结构”模型并结合基元模型的事元,提出了以用户实际操作行为为依据的机械装备概念设计方法. 该方法将用户行为特征引入机械装备前期概念设计当中,将FBS模型融入人机交互,解决设计前期的不确定性问题;文献[12]提出了基于FBS模型分解的模板重用设计方法. 该方法通过抽取设计知识,建立FBS分解模型,使模板能实现几何层和抽象层的重用,该方法在产品的新设计、改进设计和模板的使用方面都能一定程度上避免重复工作量,提高设计效率;文献[13]运用本体和NoSQL方法对机械产品方案设计知识和设计案例进行知识表示与存储,提出了基于FBS的机械产品方案设计本体构建方法,该方法有效地支撑设计知识的共享与重用,实现产品方案设计知识的语义化表示以及合理高效的存储.
行为知识的表示较为重要,目前关于行为的表达大多都是语义表达和句法表达,这些表达方法大多基于语义网络和句法来构建行为知识,使行为知识的表示具有层次性和逻辑性. 这些行为知识表示方法虽然一方面能够从功能层推出,同时也起着映射到结构层的作用,但行为的表达过于粗犷,导致产生许多意想不到的解的同时也产生大量毫无意义的解. 另外传统的语义表达和句法表达很难表示复杂系统的功能、行为和固有结构等方面知识,从而无法得到有效的而且适用于矛盾问题的知识表示,使实现智能设计变得更加困难. 中国原创学科可拓学[14]是用形式化模型研究事物拓展与变换的规律与方法,并用于创新和解决矛盾问题的新学科. 目前在多领域创新及解决矛盾问题中发挥重要作用[15],建立了基于基元理论的“可拓信息—知识—策略形式化表示体系”和可拓规则,为各领域知识表示研究提供了一种新的形式化定量化相结合的有效方法[14-16]. 文献[17]给出了“可拓信息—知识—智能形式化体系”的框架以及主要功能模块,为计算机辅助解决矛盾问题提供了可行的工具;文献[18]提出基于可拓网络图的设计方案形式化拓展原理,给出设计方案的形式化拓展知识推理算法;文献[19]提出基于可拓规则推理的故障诊断方法,与产生式规则相结合,将可拓规则应用于故障诊断当中,解决产生式规则推理方法推理效率低、知识获取困难导致的难以用于故障诊断的问题. 文献[20]基于事元理论,研究了用户需要到产品功能的映射方法及形式化方法.
根据文献[14, 16]中的事元理论可知,动态事元可用于形式化表示机械运动系统的行为知识. 本文拟将可拓学中的事元理论及其知识表示方法应用于机械运动系统行为知识表示研究,表示机械运动系统深层次的行为知识,提高人工智能的创造性思维能力和策略生成技术,为以后智能设计打下基础,提供有效策略生成的途径.
1 机械运动系统行为与事元理论概述
在工程上,机械系统通常是由动力系统、传动系统、执行系统以及控制系统等4部分组成. 其中将传动系统与执行系统统称为“机械运动系统”,亦称为“机构系统”. 在机械设备的智能设计中,其中首要的一步是生成机械运动系统的知识. 知识生成的过程基于概念设计的方法,将机械运动系统的功能逐步分解,产生其运动系统的一个或一组工艺动作的行为,生成机械运动系统的领域知识,利用相关的知识表示方法表示其领域知识.
1.1 机械运动系统的行为特性与行为过程
行为包括静态行为和动态行为. 功能只是为设计人员提供“做什么”,而行为则是需要设计人员了解“怎么做”. 目前对行为的认识主要有两种观点:一种认为行为是产品物理状态的改变或保持,还有一种认为行为是产品构件之间及构件与环境之间的相互作用. 实际上很多机电产品的行为常常是既表现有物理状态的变化,也表现为各种相互作用.
在FBS(功能—行为—结构)模型中,功能是由行为过程来实现的. 行为过程通常由单个行为或一组行为构成. 行为过程的构建会产生不同的行为关系.目前关于行为关系的研究多为4个方面,分别是因果关系、时序关系、回路关系以及状态关系.
(1) 行为间的因果关系.
不同行为间通过因果关系相互连接形成因果行为过程. 一个行为的功能输出可能是另一个行为的驱动输入,也就是说一个行为的发生必将导致另一个行为的发生. 作为一个行为间最基础的关系,因果关系所描述的是行为过程中各行为的依赖关系.
(2) 行为间的时序关系.
产品表现行为过程中会产生一系列的行为. 行为作为一个事件,它们间的发生有可能是同时发生的,也有可能是一个接着一个发生的. 因此行为发生的时序有串联性与并联性.
(3) 行为间的回路关系.
当一组行为完成一个或多个功能后,一般产品结构都会回复到它们的初始状态,以准备下一次行为过程的执行. 由于这种回路关系,当一个行为失效的时候,也会导致其他行为失效.
(4) 行为间的状态关系.
在机械产品或系统中,同一结构可以表现出一个或多个行为. 这些行为属于同一个行为的不同表示. 当其他行为或外界给予相关的刺激时,结构会发生不同状态的转换. 由此可得,同一结构的不同状态关系行为不能在同一时间发生.
1.2 事元理论及其在知识表示中的应用
事元是可拓学中用于形式化描述事件的基本元,事元理论研究了事元的算术运算、逻辑运算、事元的拓展与变换规则等[14].
行为的表现,实际上是一个构件外部与环境相互作用、内部与其他构件相互作用所形成的事件过程. 作为一个动态过程,根据文献[17]和领域知识,可以利用事元理论中的事元模型表达行为信息,利用事元的拓展规则和逻辑运算表达行为知识. 事元模型的建立可以是动态的,也可以是静态的.
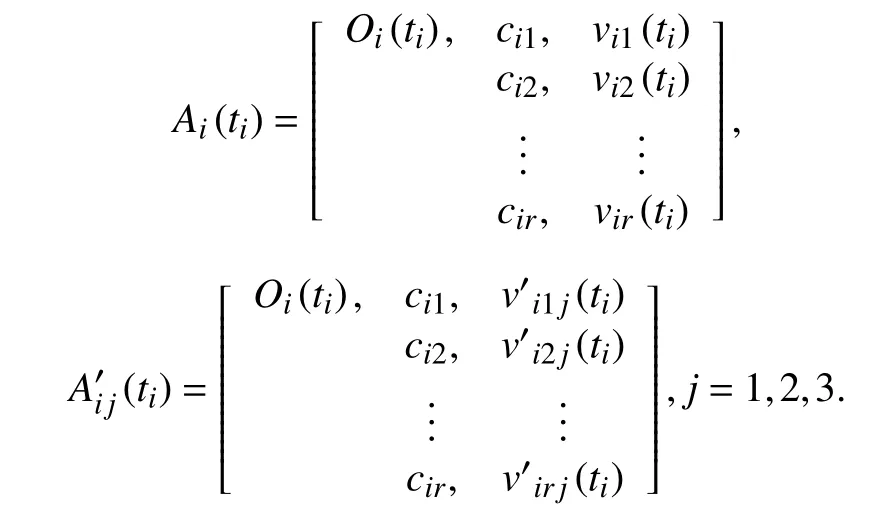
本文针对机械运动系统行为的动态过程开展研究. 设动态事元Ai(ti) 是时间ti的函数,由此建立动态事元表达式,用于表达.
动态事元表达式中,把动作Oa(ti)、动作的某个特征ca1及Oa(ti)关 于ca1所 取得的量值va1(ti)构成的有序三元组作为描述行为的基本元,称为一维动态事元.
A(ti)=(Oa(ti),ca1,va1(ti))
动作的基本特征有支配对象、施动对象、接受对象、时间、地点(位置)、程度、方式、工具等,由此可形成形式化定量化表达行为的多维事元

由于很多知识可以看成是信息元之间的关系式,因此可以用基于拓展规则和逻辑运算规则的基元关系式表示知识,限于篇幅,此不详述,在后文的研究中用到时再介绍,详情参考文献[14]和文献[16-17].
2 机械运动系统行为的知识表示方法
本节将以事元理论为基础,首先根据领域知识对机械运动系统的行为信息进行事元建模,并通过分析行为的动态过程,根据可拓学中建立的“可拓信息—知识—策略形式化体系”[17]的规范,研究行为的知识表示方法.
2.1 机械运动系统行为信息的动态事元表示
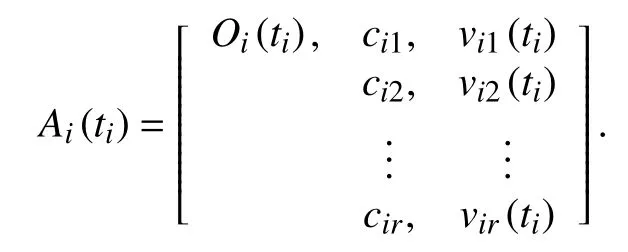
在机械运动系统中,功能是行为的主观抽象,行为是功能的具体化表现. 对行为的分析需要从微观的角度入手. 根据1.2可知,机械运动系统的行为信息可以用动态事元形式化表示. 某个时刻ti的行为的动态事元Ai(ti)表示为
2.2 基于拓展规则的机械运动系统行为的知识表示方法
根据1.1的分析可得,行为之间有不同的关系.关于这些关系,本文考虑用可拓学中的拓展规则进行表示. 拓展规则中,当一个基元发生必将导致另一个基元发生时,用蕴含型知识表示,基于蕴含型知识表示行为间的因果关系;事物之间组合关系的结果或分解后的结果,用可扩型知识表示,基于可扩型知识表示行为间的叠加关系和时序关系;具有相关关系的知识,用相关型知识表示,基于相关型知识表示行为间的回路关系;描述事物属性发散关系,用发散型知识表示,基于发散型知识表示行为间的状态关系.
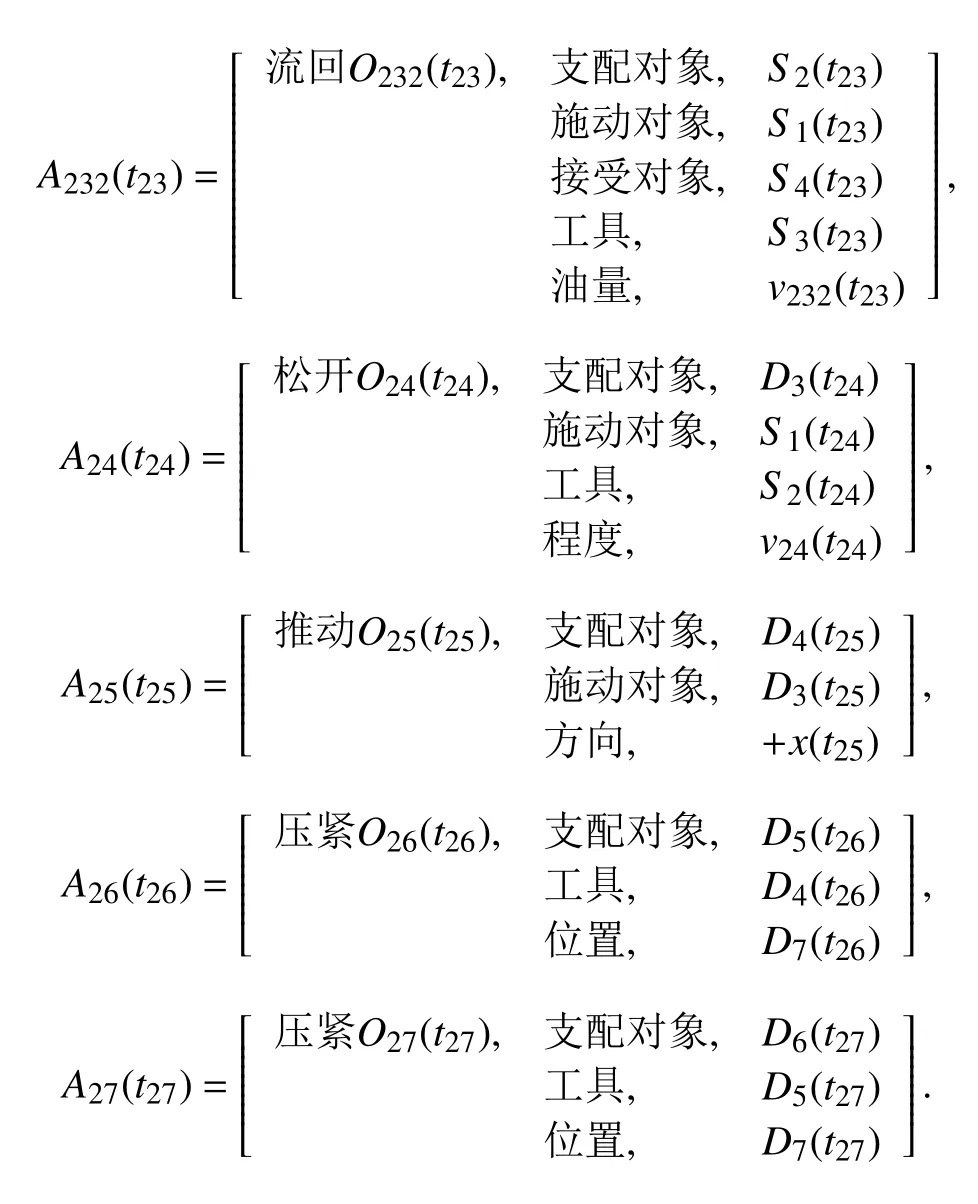
(1) 动态行为事元的蕴含型知识:文献[21]提出了基于因果分析的事元蕴含系分析的方法,将该方法应用到寻找并解决问题产生的根本原因. 本文基于该方法,根据机械运动系统行为的领域知识,建立行为事元间的因果关系模型,以获得动态行为事元的蕴含型知识. 动态行为事元蕴含型知识可以是“与蕴含型知识”、“或蕴含型知识”和“混合蕴含型知识”等等. 动态行为事元的混合蕴含型知识如图1所示.根据有向箭头上下位事元之间的因果关系,判断同一位事元之间的逻辑关系,在箭头下方用符号“∧”和“∨”标出,调整蕴含系并用符号表示.
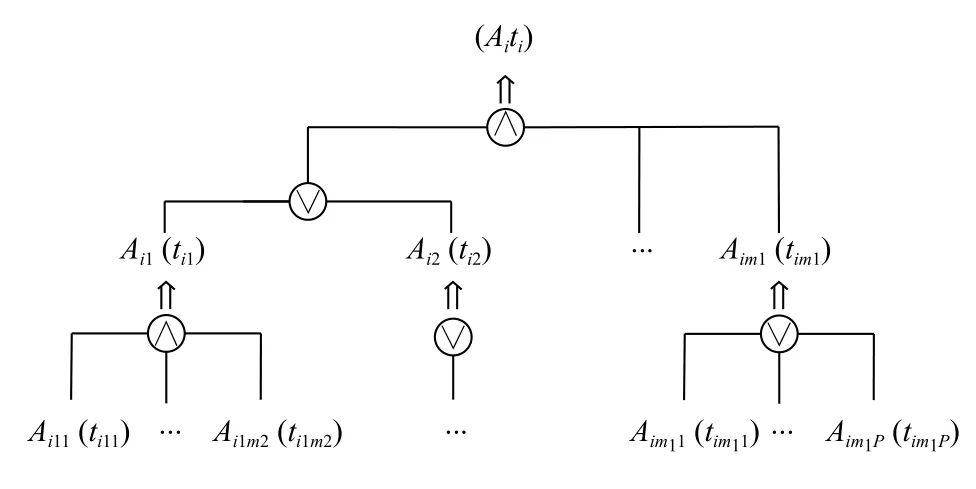
图 1 动态行为事元的混合蕴含型知识Fig.1 Hybrid implication knowledge of dynamic behavior affairelements
(2) 动态行为事元的可扩型知识:文献[14]介绍了基于可扩分析的可扩型知识,包括可分解型知识、可组合型知识、可扩大型知识和可缩小型知识等. 以可分解型知识为例,知识式表示为
Ai(ti)//{Ai1(ti1),Ai2(ti2),···,Ais(tis)}.
(3) 动态行为事元的逻辑运算型知识:基于事元的积运算,可以表示动态行为事元间的先行运动关系,基于事元的与运算,可以表示动态行为事元间的并行运动关系;基于事元的或运算,可以表示动态行为事元间的并联运动关系;基于事元的逆运算,可以表示动态行为事元的逆向运动关系.
基于事元的积运算的动态行为事元间的先行运动关系表示为:Ai(ti)Aj(tj),其中ti>tj.
基于事元的与运算的动态行为事元间的并行运动关系表示为:Ai(ti)∧Aj(ti).
基于事元的或运算的动态行为事元间的并联运动关系表示为:Ai(ti)∨Aj(ti).
(4) 动态行为事元的相关型知识:在行为的回路关系中,当一个行为发生变化时,其他行为也会发生相应的变化. 这与可拓学中的相关网有类似的地方.文献[22]根据相关网的特性,基于系统动力学建立了反馈环,以此找到模型中基元之间存在的循环关系.本文基于该方法和机械运动系统行为的回路关系,建立动态行为事元间的相关型知识.
在可拓学中,对事元而言,如果在同一时刻所做的两件事,或某一件事完成后又做另一件事时,其可行性、效果、价值或代价的量值之间有一定的函数关系,则认为这两件事是相关的. 事元的相关与时间有密切关系,在某一时刻相关的事元,在另一时刻可能相关性降低或不相关. 因此动态行为事元的相关需要找出量值之间具有相关函数关系的事元,结合动态行为事元的时序关系,建立动态行为事元相关回路模型,表达动态行为事元的相关型知识. 动态行为事元的相关型知识如图2所示. 其中,单向箭头表示有向相关,双箭头表示互为相关. 根据有向线段两端相关评价特征之间的正影响和负影响关系,在线段的箭头处用符号“+”和“-”标出,调整相关回路并用符号表示.

图 2 动态行为事元的相关型知识Fig.2 Correlation knowledge of dynamic behavior affair-elements
(5) 动态行为事元的发散型知识:一个结构可以在不同的环境下表现不同的状态. 随着状态的不同行为也会表现不同,动态行为事元也会有不同的表示. 但行为所表现的过程还是基于同一个结构. 基于发散规则中同对象同特征异量值表示同一结构下的不同状态的行为. 通过发散规则,可以得出多种同一结构下适应不同环境的不同行为事元,可根据实际环境选取相应的行为事元. 以“一对象一特征多量值”的发散规则为例,基于某一个动态行为事元Ai(ti),可获得动态行为事元间的发散型知识表示为
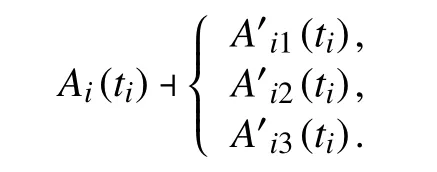
其中
3 案例分析
3.1 风力发电机背景知识
过去两千年来,风车一直在帮助人类将风中的能量转化为许多其他有用的形式,而风力发电机就是将风能转换为电能的装置. 下面简介风力发电机其主要功能及工作原理.
(1) 吹拂的风可以转动叶片,将其连接在发电机上即可接收电力.
(2) 由于噪音以及机械强度的问题,风力发电机转子总是设计成以非常低的转速转动,考虑到这种低速旋转不会产生任何有意义的电力频率,因此需要在发电机之前增加齿轮箱以增加转子的转速,齿轮箱将采用行星齿轮组装置来实现高速比.
(3) 当风过大时,需要将制动器装在机舱内部,以保证随时阻止叶片旋转.
(4) 通过电缆的电力将朝向升压变压器所在的基座中.
(5) 为了从风中提取最大的能量,总是需要保持与风对齐. 但是风向是可以随时改变的,因此需要安装在机舱顶部的速度传感器测量风速和方向,风向的偏差被发送到电子控制器,电子控制器又向偏航机构发送适当的信号以校正误差.
(6) 通过校正保证风力发电机始终与风向对齐.校正过后,根据风速,风的相对速度角会发生变化,叶片倾斜机构使叶片倾斜确保叶片与相对速度的适当对准,由此实现叶片总是处于与相对风流的最佳迎角.
(7) 由文献[23]可知,每个风力发电机都有两套制动器负责制动. 两套制动器中,转子制动为一级制动,安全制动为二级制动,其主要功能是确保一旦转子制动失败,设备依然能够安全地进入停机状态. 安全制动与转子制动并列操作,但由于液压阀的控制,只能在一定时间延迟后才动作. 在一般运行条件下,此时转子几乎已经停止转动,所以安全制动仅在转子制动系统操作失败时使用. 转子制动器安装在低速轴上,安全制动器安装在发电机轴上. 当制动结束以后,两套制动器的制动钳同时复位,为下一次制动作准备.
下面以“风力发电机的制动器Z操纵叶片旋转”这个功能事元Af为例,研究该功能事元及其对应的行为的知识表示.

以风力发电机制动器一级制动为例,当制动器不制动时接通电机和电磁阀. 电机向系统提供液压油,液压油通过主油路进入制动钳的油缸里,压缩弹簧使活塞向后运动松开制动钳. 但当系统压力大于溢流阀的启动压力时,部分压力油溢流回油池. 当制动器制动时,电机和电磁阀断电. 弹簧推动活塞向前运动,液压油通过卸油回路流回油池. 根据领域知识,建立制动器的功能结构图如图3所示. 在设计过程当中,由于机械结构的复杂性,行为信息的获取往往是很困难的. 因此需要从功能出发,对功能进行分解,完成功能层到行为层的映射. 基于功能结构图,将功能进行分解,从而获取风力发电机制动器的行为信息.
3.2 风力发电机制动器行为信息动态事元模型的建立
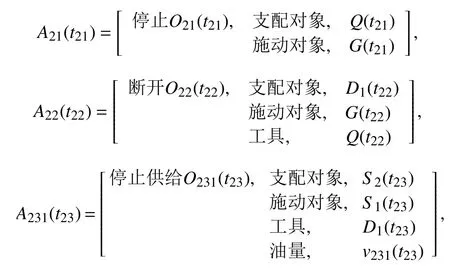
为便于建模,记电机为Q(t) ,制动器为Z(t),制动器构件为D(t) ,控制主体为G(t),制动器液压系统为S(t). 并记制动器中的电磁阀为D1(t), 溢流阀为D2(t),弹簧为D3(t), 活塞为D4(t), 制动钳为D5(t),制动盘为D6(t), 低速轴为D7(t);制动器液压系统中的主油路为S1(t), 液压油为S2(t), 卸油回路为S3(t), 油池为S4(t);弹簧向后位移为-x(t) ,向前位移为+x(t).
(1) 当要使t1时刻不制动时,动态行为事元为
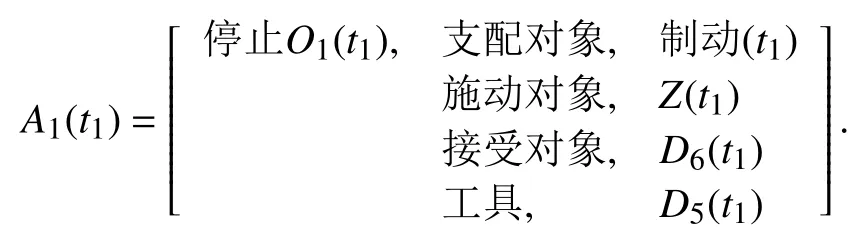
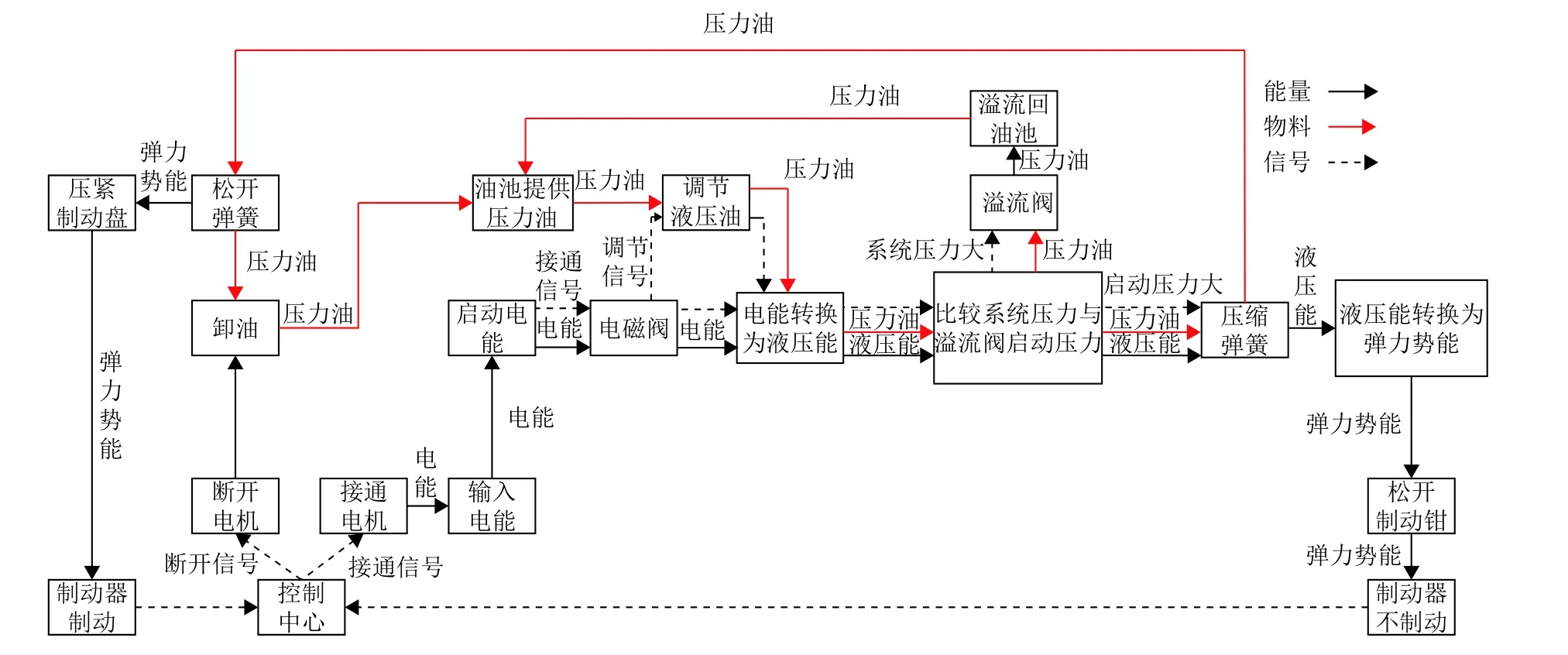
图 3 风力发电机制动器功能结构图Fig.3 A functional and structural figure of wind turbine brake
需要停止制动行为过程的动态行为事元分别表示为

(2) 当要使t2时刻制动时,动态行为事元信息为
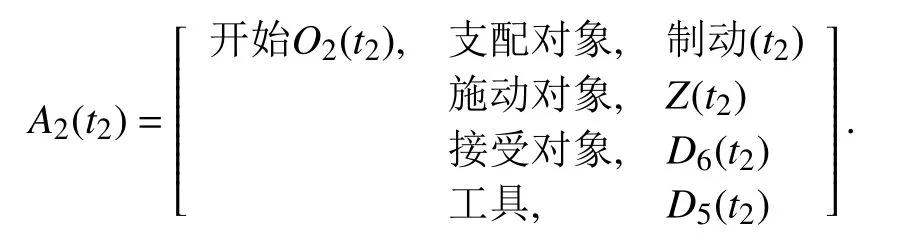
需要开始制动行为过程的动态事元分别表示为
3.3 风力发电机制动器动态行为事元的知识表示
限于篇幅原因,本案例研究的制动器一级制动的知识表示类型只用到2.2中的(1)、(4)、(5),关于制动器二级制动的其他知识表示类型将另文讨论.
(1) 风力发电机制动器动态行为事元间的因果蕴含型知识.
根据2.2(1)和图3可得,动态行为事元的蕴含型知识表示如图4所示.
(2) 风力发电机制动器动态行为事元间的相关型知识.
根据2.2(4)和图3可得,以压力油的流向为例,研究动态行为事元与液压油相关的相关型知识的表示如图5所示.
从上述相关型知识图中,可以得出液压油的相关回路关系. 其中,A132(t13)和A131(t13)关于提供液压油的油量互为相关,提供的液压油经过溢流阀,当提供液压油过多时,溢流阀对液压油进行调节来保证系统的运行;经过调节过后的压力油会压缩弹簧,A14(t14)和A132(t13)关于压缩弹簧的程度与调节液压油过后的油量相关;当压缩弹簧的液压油流回油池时,弹簧松开,A24(t24)和A14(t14)、A231(t231)关于松开弹簧的程度与压缩弹簧的程度、停止供给液压油油量相关;A232(t232)和A24(t24)、A231(t231)关于流回油池的液压油油量与松开弹簧的程度、停止供给的油量相关;流回油池的液压油为下一次提供液压油作准备,A232(t232)和A131(t131)关于下一次可以提供液压油的油量与流回油池液压油的油量相关.
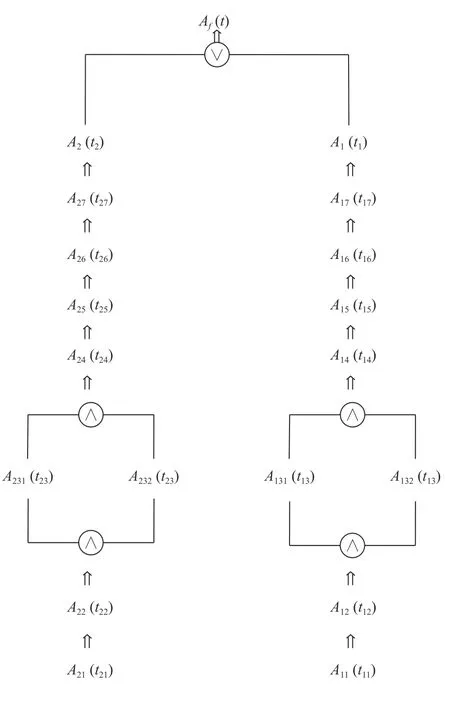
图 4 风力发电机制动器动态行为事元的因果蕴含型知识Fig.4 Causal implication knowledge of dynamic behavior affairelements of wind turbine brake
图 5 风力发电机制动器动态行为事元的相关型知识Fig.5 The related type knowledge of dynamic behavior affairelements of wind turbine brake
同理,可以基于相关型知识表示机械运动系统的能量流回路,根据能量传递过程中所涉及的数学函数,得出各个行为间的输入输出能量,反映出各个动态行为事元间的能量流动、能量变化等关系.
(3) 风力发电机制动器动态行为事元间的发散型知识.
以一级制动为例,根据“一对象多特征多量值”的发散规则和领域知识,分别对A17(t17)和A27(t27)赋予特征“状态”,并对该特征赋予量值. 设“状态”的量值的取值范围为[0, 1],1表示完全松开或压紧,0表示完全不松开或不压紧. 赋予特征后所得的事元为

根据2.2(5)和图3可得,制动器的状态主要分两种,一种是实现不制动状态,此阶段对应的行为是松开制动盘;一种是实现制动状态,此阶段对应的行为是压紧制动盘. 对A′1710(t171)和A′2710(t271)进行一对象一特征多量值发散后所得的事元为
其中

做发散分析,研究不同环境下制动器的状态. 经过发散型知识表示,可以将制动器的状态发散开来,使制动器的状态不再局限于只有制动状态和不制动状态2种情况. 由此可以得到更多诸如半制动、半不制动等状态,使制动器能在更多的环境下智能地选择使用,由此可以使制动器能实现加速、减速等功能,以应对更多的复杂环境.
4 结论
本文基于可拓信息—知识—策略的形式化体系,结合行为表示中的“输入—输出流表达法”,对行为的知识表示进行形式化研究. 本文主要的结论有:
(1) 从功能出发,建立基本功能的功能结构模型,研究机电产品在实现功能的过程中能量、物料以及信号的流向,根据这些流向,从相关领域中提取所需要的行为信息,建立了行为信息的动态事元模型.
(2) 基于蕴含型知识生成行为间的因果关系知识,基于相关型知识生成行为间的回路关系知识,基于可扩型知识和基元的逻辑运算生成行为间的时序关系知识,基于发散型知识生成行为间的状态关系知识. 由这些知识获取更深层知识,发现相关领域知识的矛盾性与不相容性,提供策略生成的途径,解决矛盾问题,为未来机电产品的智能设计打下基础. 但限于篇幅原因,本文只提供了行为的可拓信息表示以及行为关系的知识表示,若要生成所需要的知识还需要结合更多相关专家领域来建立矛盾问题的形式化模型,再基于可拓策略生成方法生成最终行为知识,生成解决矛盾问题的策略,减少行为知识表示过程中的矛盾性和不相容性,实现智能设计.
本文只考虑到物理状态的改变或保持,而没有考虑到构件与构件间、构件与环境间的关系. 事实上还可利用可拓学中的关系元理论研究产品构件间、构件与环境间的相互作用. 基于物元理论表示构件信息;基于内联关系元理论表示构件与构件间的内联关系元信息;基于外联关系元理论表示构件与环境间的外联关系元信息;由此研究各种相互作用. 限于篇幅,本文并没有提供这一类行为知识生成的方法,将另文论述.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
机电信息(2022年9期)2022-05-07
故事作文·高年级(2021年12期)2021-12-21
石油商技(2021年1期)2021-03-29
电子制作(2019年7期)2019-04-25
中国特种设备安全(2019年3期)2019-04-22
军事文摘(2016年16期)2016-09-13
智能建筑电气技术(2015年5期)2015-12-10
汽车科技(2015年1期)2015-02-28
中国修船(2014年5期)2014-12-18