
基于双渐消因子调节的自适应卡尔曼滤波器
2019-12-17 09:04朱文超
石家庄铁道大学学报(自然科学版) 2019年4期
朱文超, 何 飞
(1.中国电子科技集团公司 第三十八研究所,安徽 合肥 230041;2.中国科学技术大学,安徽 合肥 230027;3.中国科学院 合肥智能机械研究所,安徽 合肥 230031)
0 引言
在已知系统和量测数学模型、噪声统计特性、状态初值的情况下,卡尔曼(Kalman)滤波器可利用输出信号的量测数据获取状态变量的估计值,具有计算量小,可递推、实时性高等特点[1]。然而,标准Kalman滤波器过分依赖于系统状态空间模型的准确性,当状态参数发生扰动时,往往无法精确跟踪系统突变状态,甚至会引起滤波发散现象[2]。针对这一问题,文献[3-4]在预测协方差中引入单渐消因子,通过Sage-Husa估计法重新解算量测残差,增强新息在状态估计中的权重。文献[5]通过强跟踪中心查分滤波器实时估计汽车前后轴等效时变侧偏刚度,对标称模型的不精确与状态扰动等因素具有强鲁棒性。文献[6-7]在强跟踪滤波器中引入了限定记忆的思想,通过次优渐消因子修正滤波增益,增强跟踪突变状态的能力。文献[8-9]将强跟踪滤波器和UKF滤波器相融合,引入时变渐消因子调节卡尔曼增益,强迫输出残差序列保持正交,提取残差有效信息,提升突变状态的跟踪能力。文献[10]在预测协方差中融合弱化因子与渐消因子,依据模糊控制理论,膨胀状态突变下的量测新息,提升跟踪精度,已成功应用于GPS定位解算领域。
然而,上述研究均未对状态突变程度进行等级划分,致使收敛速度慢。针对这一问题,本文基于滤波发散判据,分析Sage窗量测新息与标准Kalman量测新息的关系,以储备系数为等级,判断状态突变程度,利用双渐消因子调整预测协方差,增权量测新息,提升突变状态的估计精度。
1 Kalman滤波简介
1.1 线性离散系统状态空间模型
k历元下,线性离散时间系统状态方程和量测方程可表示为

式中,Xk为m 维状态向量;Φk,k-1为m×m 维k-1历元至k历元的状态转移矩阵;Uk-1为p 维输入控制量;Γk,k-1为m×p 维控制输入系数矩阵;Wk-1为q维系统过程噪声序列;Ψk,k-1为m×q维过程噪声系数矩阵。Zk为j 维量测向量;Hk为j×m 维量测系数矩阵;Vk为j 维系统量测噪声序列。
1.2 Kalman滤波鲁棒性
Kalman滤波是一种线性、无偏且误差方差最小的随机系统最优估计算法[11],但鲁棒性较差,无法精准跟踪系统突变状态。究其原因,主要有2点:①状态扰动下的先验预测偏差较大;②稳态Kalman滤波器的增益为定量,状态突变时,无法实时增权量测新息。假设状态扰动(系统控制方式改变、噪声特性变化等)于k历元加载至稳态系统,则突变信息将直接作用于状态方程中的系数矩阵,如扰动方程(3)中ΔΦk,k-1、ΔΓk,k-1、ΔΨk,k-1所示。此时,若仍依靠旧状态方程进行先验预测,必然产生较大的偏差。然而,稳态Kalman的滤波增益无法实时增权量测新息,则最优估计将逐渐偏离真实值,最终致使滤波器发散。

精确跟踪系统突变状态,避免滤波器发散的方法有2种:①分析状态扰动的统计特性,建立精确的数学模型,获取准确先验预测。②寻找激活稳态滤波增益方法,当状态扰动来临时,实时增权测量新息。
然而,状态扰动种类繁多,统计特性复杂,难以准确建立数学模型,故本文针对不同程度的突变状态,利用双渐消因子优化预测协方差,激活稳态滤波增益,采用实时调整量测新息在最优估计中权重的策略,精确跟踪系统突变状态。
2 自适应Kalman滤波
2.1 递推规则设计
鉴于线性离散系统状态空间模型,在Kalman递推规则中,引入双渐消因子,实时调节先验预测协方差,获取自适应Kalman滤波迭代公式。
状态预测:
状态一步预测

一步预测协方差

观测更新:
量测新息

滤波增益

最优估计

后验协方差

式中,Qk-1、Rk分别为过程噪声Wk-1、量测噪声Vk的协方差矩阵。
2.2 双渐消因子的求解
最优Kalman滤波具备量测新息处处正交的特性,新息序列Y(k)的正交方程可用自相关函数表示为[12]

式中,Ck为量测新息协方差矩阵,上标opt代表最优矩阵。
依据Kalman滤波准则,化简式(11)为

若系统状态未发生突变,则标准Kalman滤波器的预测协方差Pbasek,k-1可满足正交方程

式中,上标base代表标准Kalman滤波器产生的协方差矩阵。
然而,随着时间的推移,Kalman滤波器逐渐进入稳态,滤波增益及后验误差协方差的取值固定。倘若此时系统状态发生突变,需激活滤波增益,利用优化预测协方差满足正交方程,则式(12)可化为

根据Sage开窗估计法[13],由量测新息获取Coptk在k 历元下的估计值Ck,即

联立式(13)、式(15)、式(16)进行矩阵的迹运算,获取λk的函数解析式

需要说明的是,更新λk+1时,需将k历元下的后验方差作为Pkbase,代入式(13)与式(14),求解Ckba+se1,判断其与的关系,构造边界条件,再进入k+1历元的迭代估计阶段。

综合式(6)、式(14)、式(18)进行矩阵的迹运算,得到γk函数解析式

综合式(17)~式(19),获得因子λk与γk的终解,即
3 试验验证
本节以中科院智能机械研究所自行研制的双E 型弹性体六维力传感器为静态标定对象,研究标准Kalman滤波器(SKF)、抗差Kalman滤波器[15](RKF)、自适应Kalman滤波器(AKF)的鲁棒特性。
六维力传感器标定实验台如图1所示。依次从Fz方向标定数据库中抽取3组量测值进行分析。其中,第一组为恒载输出电压(理想值25 m V);第二组为卸载输出电压(理想值10 m V);第三组为加载输出电压(理想值60 m V)。假设前47历元,传感器持续进行恒载输出。第48历元时,分别进行不同量级的卸载或加载操作,则系统状态将发生不同程度突变,理想趋势如图2所示。状态突变原因为传感器的控制载荷发生变化,故k历元下的扰动方程(3)可化为式(21),分别利用SKF、RKF、AKF对输出信号的量测数据进行滤波处理,结果如图3~图10所示。

图2 传感器阶跃输出信号
图3~图5反映了传感器输出由恒载向卸载转变时,3种算法的滤波效果。从图4中可以看出,前47历元,即系统状态未突变前,量测新息序列满足正交性要求,故AKF与RKF均退化为SKF。3种算法状态收敛速度与精度均相同。
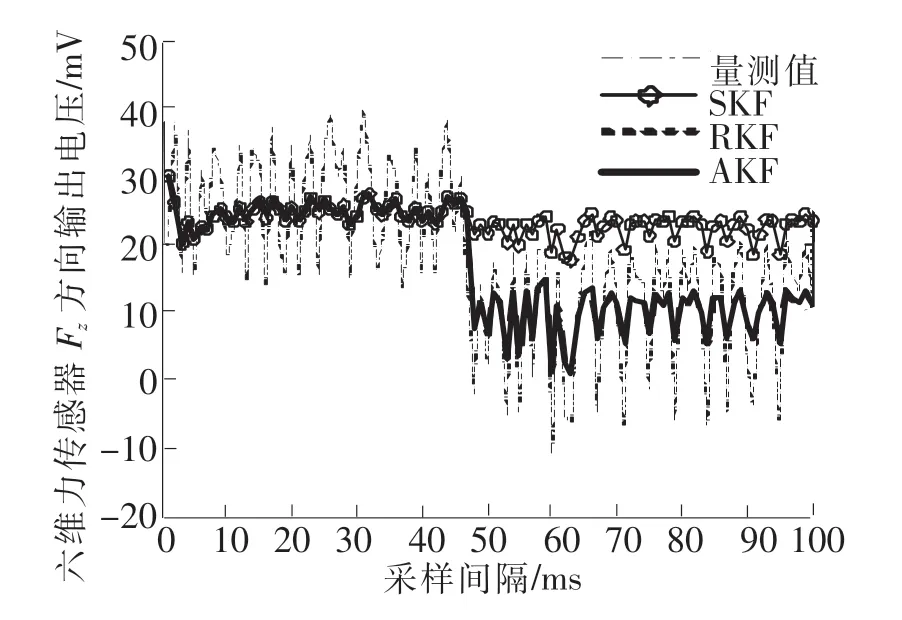
图3 卸载前后3种算法跟踪效果
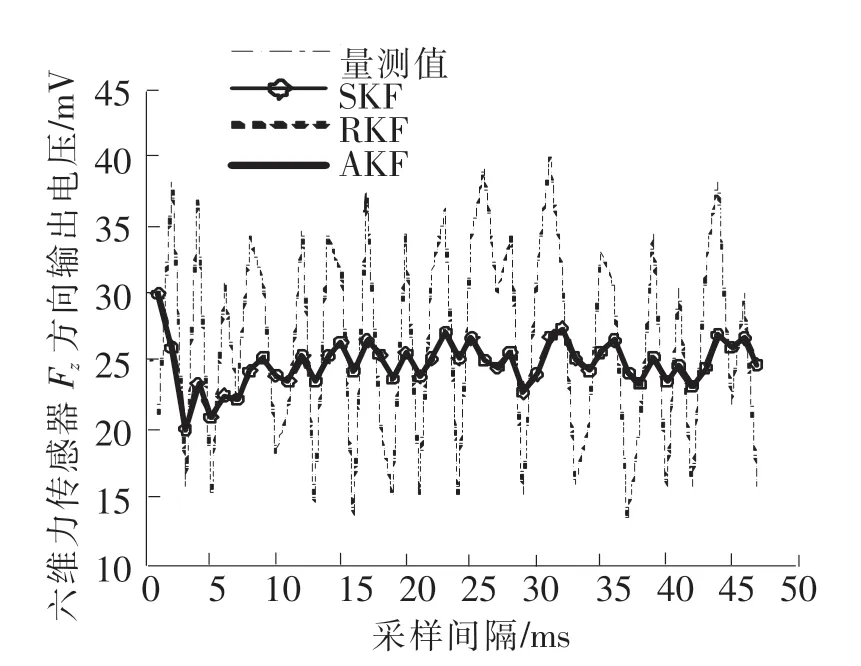
图4 卸载前3种算法跟踪效果
然而,当系统状态在第48历元发生突变时,如图3所示,SKF算法未更新滤波增益,逐渐偏离真实状态,估计误差无限增大。反观AKF与RKF,两者均能有效地跟踪系统突变状态。然而,由于状态突变程度较浅,AKF退化为RKF,两者滤波精度相同,如图5所示。
图6反映了状态突变前后渐消因子的时变趋势。不难发现,因子γk处于冷却状态,AKF仅用因子λk进行状态调节。λk的时变趋势分为5个阶段。
(1)阶段1(47历元至48历元)。状态于此阶段突变,突变信息作用于量测新息协方差,致使估计值骤然变大,λk由冷却骤变为激活态。
(2)阶段2(48历元至49历元)。该阶段的先验估计涵盖了量测新息,其效果优于阶段1。然而,依据图5所示,跟踪初期的后验误差大于突变前的稳态误差。故减小,Ckbase增大,λk处于急速下降状态。
(3)阶段3(49历元至71历元)。该阶段状态后验误差开始减小,估计精度开始提升,则与Ckbase均开始减小,λk的下降速率减缓。
(4)阶段4(71历元至76历元)。该阶段状态后验误差缓慢减小,估计精度缓慢提升,则与Ckbase均缓慢减小,λk的下降速率进一步减缓。
(5)阶段5(76历元至100历元)。该阶段后验误差稳定,则λk仅在稳态值范围进行微调。

图5 卸载后3种算法跟踪效果

图6 卸载后AKF渐消因子时变趋势
图7~图8反映了传感器输出由恒载向加载转变时,3种算法的滤波效果。当系统状态在第48历元发生突变时,SKF滤波发散。RKF仅利用因子λk调节滤波增益,增权量测新息,能够有效跟踪突变状态。然而,AKF 的总体滤波效果优于RKF。尤其在第72 历元至第100 历元阶段,AKF 状态收敛速度优于RKF。

图7 加载前后3种算法跟踪效果

图8 加载后3种算法跟踪效果
从图9~图10可以看出,状态突变后,AKF持续激活双渐消因子λk与γk,能够更深层次地利用量测新息纠正估计值。加载环境下,γk的时变趋势分为4个阶段;λk的时变趋势分为6个阶段。
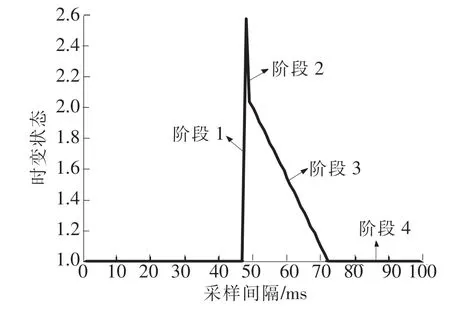
图9 加载后AKF因子λk 时变趋势
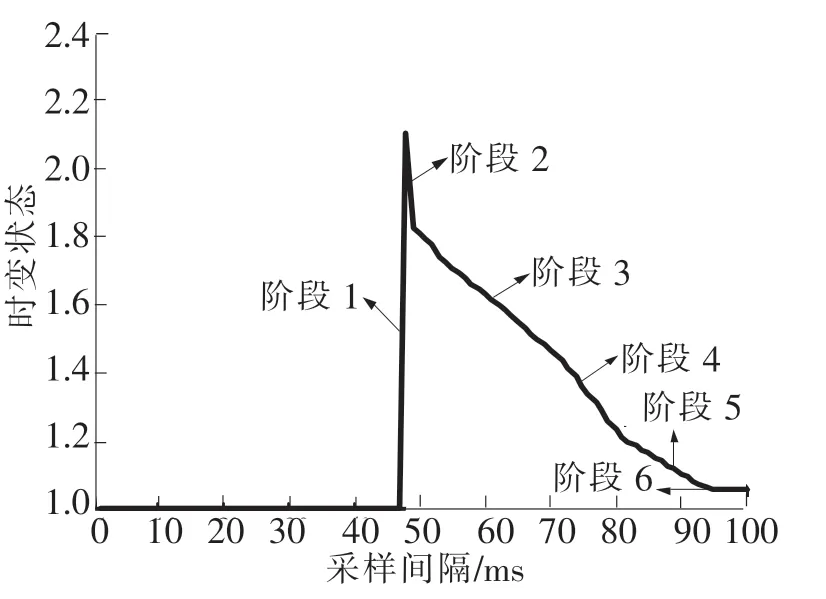
图10 加载后AKF因子γk 时变趋势
γk的时变趋势解析:
(1)阶段1(47 历元至48 历元)。状态于此阶段突变,突变信息体现于量测数据,致使后验协方差PLSW48骤然变大,γk由冷却骤变为激活态。
(2)阶段2(48历元至49历元)。该阶段的先验估计涵盖了量测新息,先验误差Pbase48,48的精度回升,则相较于阶段1,γk处于急速下降状态。
(3)阶段3(49历元至72历元)。该阶段后验误差开始减小,先验估计精度稳步提升,则相较于阶段2,γk的下降速率减缓。
(4)阶段4(72历元至100历元)。该阶段状态后验误差继续减小,第72历元与Cbkase之间的关系到达临界条件,γk由激活变为冷却态。
λk的时变趋势解析:
(1)阶段1、阶段2、阶段3的趋势分析同卸载环境λk。
(2)阶段4(72历元至81历元)。该阶段γk处于冷却状态,则Ckbase的衰减速率变慢。相较于阶段3,λk的下降速率加快。
(3)阶段5(81历元至94历元)。该阶段后验误差缓慢减小,估计精度缓慢提升与Cbkase均缓慢减小,相较于阶段4,λk的下降速率有所减缓。
(4)阶段6(94历元至100历元)。该阶段后验误差稳定,则λk仅在稳态值范围进行微调。
通过式(22)解算72历元至第100历元3种算法估计结果的均方根误差X~kRMSE,详见表1。结果显示,SKF误差较大,处于发散状态。相较于RKF,AKF稳态精度提升了44.76%。


表1 滤波算法性能对比
4 结论
为解决标准Kalman滤波无法实时精确估计突变状态的问题,设计了双渐消因子自适应Kalman滤波器。面对不同程度的状态突变,采用合适的渐消因子组合,实时调节预测协方差,变权量测新息。实验结果表明,自适应Kalman滤波器,具有较强的鲁棒性,稳态精度优于抗差Kalman滤波,可运用于六维力传感器静态标定领域。然而,本文仅研究标量渐消因子,对于多维度渐消因子的求解方法,还有待于进一步深入研究。
猜你喜欢
黑龙江电力(2022年5期)2023-01-10
测绘学报(2022年5期)2022-05-31
青岛科技大学学报(自然科学版)(2021年6期)2021-12-17
青岛科技大学学报(自然科学版)(2021年4期)2021-07-26
中国惯性技术学报(2020年2期)2020-07-24
自动化学报(2019年12期)2020-01-19
全球定位系统(2019年4期)2019-08-30
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
导航定位学报(2016年4期)2017-01-05
