
双8字型无碳小车的研究设计
2019-12-19 02:09夏有强王茂赵泓宇
科技创新导报 2019年22期
夏有强 王茂 赵泓宇

摘 要:根据第六届全国大学生工程训练综合能力竞赛的要求以及“无碳”的时代新理念,现设计出一种基于凸轮机构的双8字型无碳小车。本文将介绍竞赛要求,从能量转换机构、转向机构、传动机构及车身结构等多方面进行设计说明。在加工装配小车后验证了该无碳小车可按预定轨迹行进达到预期成果,说明了小车具有高效率和低偏差的优点,证明了研究设计的科学高效。
关键词:双8字轨迹 无碳小车 齿轮传动 凸轮机构
中图分类号:TH122 文献标识码:A 文章编号:1674-098X(2019)08(a)-0085-03
Abstract:According to the requirements of the 6th national engineering training comprehensive ability competition for college students, and the new idea of carbon free,now design a cam-based double-8-shaped carbon-free car. This article will introduce the competition requirements, and explain the design from the energy conversion mechanism, steering mechanism, transmission mechanism and body structure .After processing and assembling the car, it was verified that the carbon-free car could travel on a predetermined track and achieve the expected results,which has the advantages of high efficiency and low deviation and proves the scientific efficiency of research design.
Key Words: Double 8-shaped track; Carbon-free car; Gear transmission; CAM mechanism
全国大学生工程训练综合能力竞赛是由教育部高教司主办的全国性大学生科技创新实践竞赛活动,为提升大学生工程创新意识、实践动手能力以及团队合作精神。2018年,第六届全国大学生工程训练综合能力竞赛主题为“以重力势能驱动的具有方向控制功能的自行小车”,要求设计出一种无碳小车可完成自启、行进、避障等动作而完全由H=400±2mm、M=1kg的标准砝码(Ф50×65mm,碳钢制作)提供能量,且无碳小车行进时承载的标准砝码不允许发生掉落。同时,竞赛要求无碳小车可调节转向以适应不同间距障碍桩的场地限制[1-2]。
无碳小车需绕中线上的三个障碍桩按“双8”字型轨迹循环运行,以小车成功完成“双8”字绕行圈数的多少来评定成绩。一个成功的“8”字绕障轨迹为:3个封闭圈轨迹和轨迹的4次变向交替出现,变向指的是:轨迹的曲率中心从轨迹的一侧变化到另一侧。比赛中,小车需连续运行,直至停止。小車没有绕过障碍、碰倒障碍、将障碍物推出定位圆区域、砝码脱离小车、小车停止或小车掉下球台均视为本次比赛结束[3]。
1 设计背景
本届竞赛命题为“以重力势能驱动的具有方向控制功能的自行小车”。按照竞赛要求,设计制作一款靠重力势能驱动且控制机构可调节方向的纯机械自驱动小车。供能砝码预置高度为 400±2mm(如图1所示)。无碳小车在半张标准乒乓球台赛道上前行时可自动避开障碍,并按双“8”字形轨迹运行,如图2所示。
2 无碳小车的设计方案
首先设计出合适的机架实现重物势能的高效转换与传递,以及前轮规律转向的控制,其次根据已设计的各部分机构及预定双8字轨迹设计无碳小车的前后轮尺寸、传动机构的齿轮传动比及往复运动机构的运动轨迹,再由各机构的连接装置合理设置各零件间的配合尺寸、连接方式,使各机构零部件相互不干涉且高效运行[4]。
2.1 确定双8字型轨迹
无碳小车的理论轨迹为双8字型(见图3),因桌面设有三处D=40mm的碍物桩以及W/2=59mm的车身自宽限制,故轨迹中间处设计为R=70mm的小圆以及两端处R=280mm的大圆。为防止小车在运行中发生侧翻,提高小车运行平稳性,在轨迹大圆与轨迹小圆的过渡段采用合适的样条曲线作为设计轨迹(过渡曲线参考值由小车轨迹模拟实验得出)。
2.2 小车驱动方案
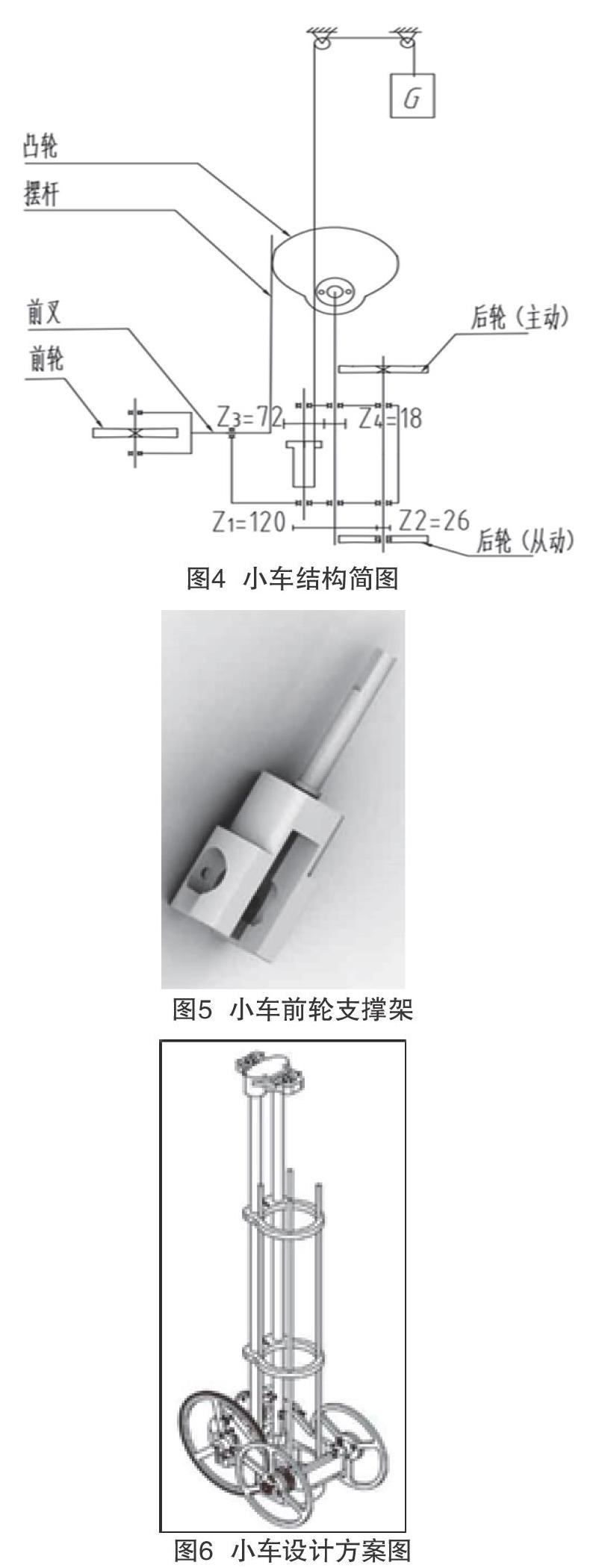
无碳小车沿预定曲线行进,因后轮与地面之间的运动约束而产生差速,而由重物作为唯一动力源,为此小车后轮采用单轮驱动方式[5]。重物降落通过细绳和滑轮带动主动轴转动,主动轴通过齿轮将动力传递给主动轮从而带动转向机构运作。同时,采用二级齿轮传动可使齿轮具有传动比稳定、工作可靠、效率高的特点,小车传动简图如图4所示。
2.3 小车平衡
小车底架采用3D打印技术制造,保证车体强度足够可支撑全车构件,同时较金属底架减小阻力,降低能量损耗,使车身整体结构最优化与重量最轻化;主动轮和从动轮倒圆角处理,减小与桌面的接触面积,减小摩擦阻力与降低桌面黏附物的粘结程度[6];重物支撑架采用D=10mm的玻纤管,侧板、底板、前横梁以及大齿轮采用铝合金且镂空减轻小车重量;重物势能部分转化为小车动能,部分消耗为摩擦做功,为此转动副全部安装轴承。
若小车变速行驶会造成前后轮差速较大,效率严重降低,因此小车行进时尽可能在长轨迹上做匀速运动且保持桌面平稳;小车行进时需不断改变前轮偏向角度,因此将小车前轮设计在后轮中线上,同时外加一个前轮支撑架(见图5),使车身前后高度一致;若小车重物布置太靠后,会使小车前进时由于重心偏移发生翻车,且对小车启动造成极大阻力而无法自启。根据前期受力分析,重物置于小车后轮中线上且距前轮85mm处最为适宜,无碳小车设计方案如图6所示。
2.4 小车设计方案
2.4.1 能量转换机构
为使重物可靠稳定地降落且实现重力势能到机械能的转化,因此采用较好的尼龙线,一端缠绕于重物挂钩,另一端缠绕于绕线轮轮盘,利用重物重力产生的力矩驱动绕线轮回转;绕线轮轮盘直径决定着驱动力矩的大小,考虑到尼龙线转动的连贯性,故采用阶梯式绕线轮轮盘;小车启动时采用大直径绕线轮轮盘作为启动盘以实现较大力矩加速自启,当达到正常行进速度后,绕线轮轮盘直径减小,小车匀速行进[7]。
2.4.2 传动机构
传动机构由前齿轮、中齿轮、大齿轮、后齿轮、后轴组成,前轴带动齿轮又带动后轴转动将动能传递于后轮使其转动。为高效利用能量,使小车行进距离更远,则小车采用二級齿轮传动。具体计算如下:绕线轴直径Dmax=11mm,小车行进距离S=67128.37mm,单位轨迹距离S0=350×3.14×2+230×3.14=2920.2mm,理论轨迹数目M=S/S0=67128.37/2920.2≈23个,单位里程耗功率=砝码下降长度H(mm)/小车行进距离S(mm)=400/67128.37=0.00595873。
2.4.3 凸轮尺寸
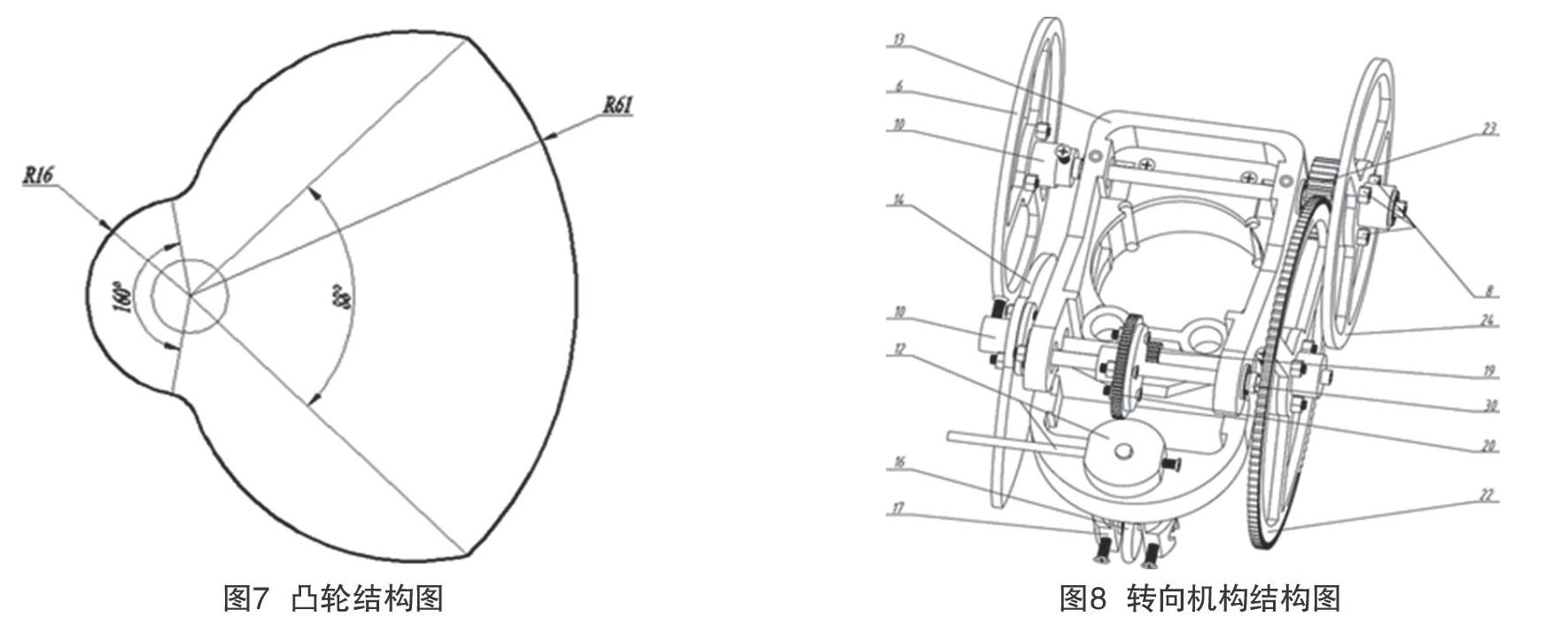
小车实际行进轨迹可分解为两个近似半圆(分别为160°和88°)和半段正弦曲线及镜像翻转的半段正弦曲线,取障碍桩间距350mm进行实验。通过前期轨迹的理论分析初步设计出凸轮轮廓,随后通过实验反复修正凸轮参数(行进5圈时后轮初始偏移量△x=10mm),最终修正完成的凸轮如图7所示。
2.4.4 转向机构
转向机构由凸轮10、摆杆和前叉12组成(如图8所示),前轴带动凸轮旋转引导摆杆规律摆动,通过前叉(由16和17组成)使前轮方向偏移变换,引导小车行进出双“8”字轨迹。
2.4.5 车身设计
为使小车整体结构紧凑、不相互干涉以及便于转向,三根传动轴呈空间分布,凸轮轴和绕线轴的水平距离L1=11mm, 后轮轴和凸轮轴的水平距离L2=71mm,前轮轴到凸轮轴的水平距离L3=39mm,前轮轴到驱动轮轴的水平距离L4=110mm,车身设计尺寸为L=195mm、W=130mm、H=507mm。
为保持车身运行稳定,应设计为正方体结构;在侧板及前叉轴承边打孔,利用垫片使轴承更好地定位,避免轴向移动;后轴采用光轴以双轮毂两端定位,轴承采用法兰盘轴承便于拆装;各零件配合处都钻取Φ=3mm的孔,增加各零件间的配合度与紧密型。
2.4.6 零部件加工选择
小车车轮统一采用激光切割加工,为减小阻力,主动轮和从动轮通过倒圆角处理以减小与桌面的接触面积;车底架采用3D打印技术一体化制造,可减轻车身自重;重物支撑架采用D=10mm的现成玻纤管;侧板、底板、前横梁和大齿轮采用铝合金材料,保持车体结构强度,且镂空以减轻小车的重量。
3 结语
(1)最终通过实践验证小车可完成12个完整双8字轨迹,且获得第六届全国大学生工程训练综合能力竞赛四川赛区比赛一等奖,证明了设计的科学性与高效性;
(2)实践中通过在前轴端部凸轮处设置螺钉锁紧机构可快速高效地定量修正轨迹,满足轨迹要求;
(3)与一般控制机构比较,凸轮可实现小车任意轨迹的行进,尤其对于较为复杂的轨迹、相对传统的曲柄连杆机构具有极大的优势。
参考文献
[1] 黄艳红.基于圆柱凸轮机构的“双8字”型无碳小车的设计[J].南方农机,2019,50(9):103,109.
[2] 郑文纬,吴克坚.机械原理[M].北京: 高等教育出版社,1997.
[3] 吴亚昆.双“8”字绕障无碳小车的创新设计[J].科学技术创新,2019(10):154-155.
[4] 赵海龙,崔立军.一种挑战8字轨迹最小桩距无碳小车设计[J].产业与科技论坛,2017,16(22):61-62.
[5] 刘洋,姜吉光,谢醇.基于“轨迹分析法”的无碳小车微调机构的创新设计[J].机械传动,2015,39(12):83-87.
[6] 廖智雄,彭松林,胡南,等.基于任意张角曲线的8字凸轮小车[J].中国新技术新产品,2015(20):105.
[7] 吴新良,刘建春,郑朝阳.重力驱动的避障小车设计与制造[J].机械设计,2014,31(10):25-28.
