
壁面自动爬行机器人的设计与研究
2019-12-20 03:04黄渝淞李波谢箭吴勇曾琳
锋绘 2019年11期
关键词:机器人
黄渝淞 李波 谢箭 吴勇 曾琳
摘 要:近年來我国经济高速的发展,城市的规模不断扩展,机器人技术也不断提高,本文设计一种吸附壁面完成自动爬行的机器人,可实现转向、壁障等常见地面机器人功能,分析了吸附原理、机器人的运动学特性,使机器人能够在地面和垂直壁面自动爬行完成作业,针对目前该领域现状进行相关分析与研究,有一定的理论意义与实用价值。
关键词:壁面作业; 真空吸附; 自动爬行; 机器人
1 引言
随着社会的不断进步,越来越多的人力工作被机器代替,机器人的发展作为一种新型生产工具,已经进入了各行各业各个领域。壁面自动爬行机器人是结合移动、转向、避障功能于一体的全方位爬行机器人,不仅可以在地面行走,也能够在垂直壁面自动爬行,该作业机器人在工业、建筑行业、消防等领域可以广泛的应用,在需要人力进行作业的地方使用机器人代替,下面针对壁面自动爬行机器人的具体设计内容进行相关研究,为机器人领域的发展积累经验。
2 国内外研究现状
国外研究爬行机器人早在19世纪都有涉及,日本、美国先后研究双足爬行机器人、四足爬行机器人、六足爬行机器人。日本在加拿大驻日大使馆研制出了顶棚玻璃清洗爬壁机器人,它是由纵向直线气缸和左右气缸组成,能够完成纵向、横向直线运动,但不能跨越障碍和转向。英国在壁面移动机器人吸附装置研究中,研制成功用螺旋桨驱动的飞行壁面移动机器人,这是壁面自动爬行机器人设计上的一个飞跃,主要是采用发动机驱动两个螺旋桨产生向上推动及推向壁面的压力达到吸附功能。
国内大多数企业与院校在研究爬行机器人时,针对机器人的实现功能做深入研究,先后有擦窗机器人的研究、玻璃幕墙的清洗、高空检查、管道爬行等等结合壁面自动爬行机器人进行功能的实现。
3 壁面自动爬行机器人内容设计
根据相关调查统计,壁面自动爬行机器人要完成作业,必须具备两个功能,吸附装置与移动装置,而实现这两种基本功能又能以多种方式呈现,目前移动装置的实现有车轮履带式、足状式。吸附装置有真空吸附、磁性吸附、反向推力吸附。吸附功能是壁面自动爬行的特殊功能,在运动学与力学中,吸附力与移动的推力又存在着相互影响,要想在吸附过程中又进行移动,必须找到机器人与壁面之间产生的一个正压力,保证机器人能够在吸附壁面的同时可以有效的移动。
3.1 吸附装置
利用大气压强原理,驱动电机带动扇叶转动产生风力使机器人与壁面接触产生气压差,达到真空吸附壁面,其中需要注意的是吸力与机器本身的重力,也涉及到壁面的角度、坡度以及壁面的粗糙程度也会影响机器人的吸附。由此,可以知道要实现壁面自动爬行机器人的设计,吸附装置尤为重要,吸附功能的设计必须满足作业功能带来的影响,从多个方面的影响考虑,实现机器人的需求。
3.2 移动装置
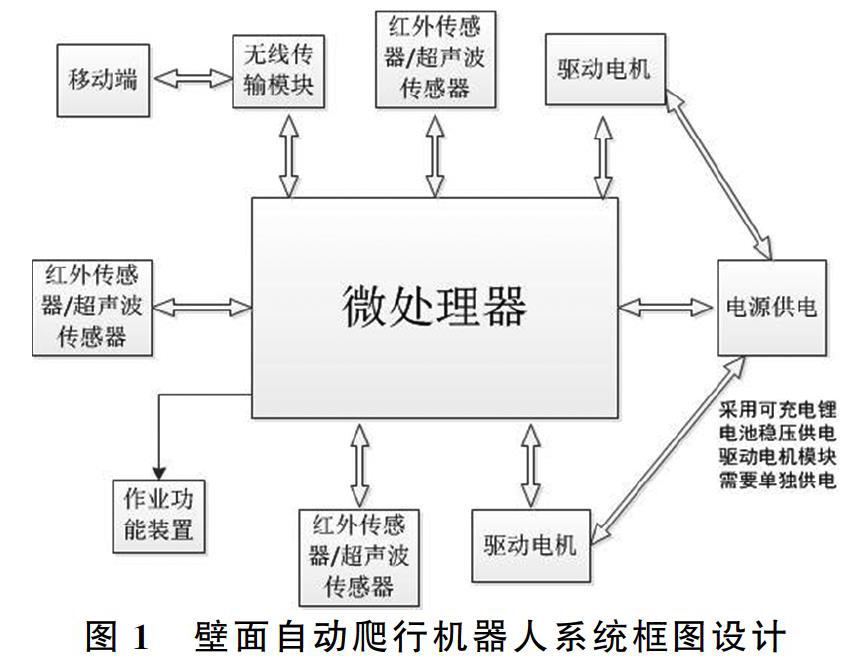
驱动电机带动履带转动,完成爬行功能,可以有效的实现跨越障碍、不同角度、坡地、粗糙程度的壁面进行爬行。自动爬行功能需要在机器人自身安装传感器检测障碍物,通过微处理器完成信号的检测与处理。针对壁面自动爬行机器人的设计方案中,吸附装置与移动装置是需要同时进行的,相应的系统处理都是为了机器人能够在壁面进行作业的目的,达到工作效率的提高,或是代替人工作业,实践中还需要对机器人进行详细的内部设计,根据作业功能完成整体机器人的设计,从而更好的推动壁面自动爬行机器人的研究与实现。系统框图如图1所示。
4 结论
壁面自动爬行机器人从国内外现状分析,到功能的设计,必须针机器人的作业功能、作业环境、作业性质,提出开展壁面自动爬行机器人的功能要求,并针对这些性能要求进行设计,实现机器人在壁面上稳定吸附、自动爬行、可靠作业。
参考文献
[1]范增良.刚性真空吸盘拾取性能的研究[D].江南大学,2012.
[2]王荣华.爬壁机器人设计及动力性能研究[D].沈阳工业大学,2007.
[3]倪健康.爬壁机器人设计及其吸附装置优化[D].大连海事大学,2013.
[4]张兴悟,章永华,杨杰.高机动性小型清洁爬壁机器人的研究[J].机械研究与应用,2007,(02).
[5]石先杰,史冬岩,邓波,陆玉婷.基于TRIZ理论的攀爬机器人创新设计[J].应用科技,2011,(03).
猜你喜欢
小哥白尼(趣味科学)(2022年4期)2022-06-30
娃娃乐园·综合智能(2022年6期)2022-06-17
趣味(数学)(2021年6期)2021-11-06
疯狂英语·新读写(2021年8期)2021-11-05
少先队活动(2021年5期)2021-07-22
金桥(2019年10期)2019-08-13
大社会(2016年3期)2016-05-04
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07