小型空间对接机构设计与仿真分析
2019-12-24 07:33马如奇高翔宇姜水清王友渔
载人航天 2019年6期
马如奇,高翔宇,姜水清,白 美,王友渔,侯 亮
(北京空间飞行器总体设计部空间智能机器人系统技术与应用北京市重点实验室,北京100094)
1 引言
人类对航天器性能、效率、寿命、成本提出越来越高的需求,目前有效的解决途径是在轨服务技术。美国先后开展了轨道快车计划[1]、凤凰计划[2]等项目,在该领域处于领先地位;欧洲各国在欧空局主导下开展了ROGER、ROTEX、TECSAS等在轨服务验证项目[3-6];日本也开展了与在轨服务相关的ETS-VII项目[7-8]。
开展在轨服务首先需要实现服务航天器对受服务航天器的在轨捕获对接,小型对接机构作为在轨服务中建立航天器间刚性连接的重要执行系统,是决定在轨服务任务是否能够顺利开展的关键设备。早期对接机构的研究主要针对应用于载人航天的大型航天器,该类对接机构的主要特点是对接过程有人参与,典型形式为异体周边式与中心式[9],机构中间需设计航天员通道。随着在轨服务技术的发展,针对在轨服务的小型对接机构成为领域内的研究热点,其主要特点是对接过程无人参与,能够重复多次使用,并需要保证服务航天器与受服务航天器间的可靠对接与分离[10-12]。
本文在借鉴现有小型对接机构设计基础上,针对某型号任务对在轨无人对接捕获的实际需求,提出一种三爪式小型无人对接机构方案,该对接机构由主动捕获机构与被动适配器组成,通过主动捕获机构上圆周均布的3个捕获手抓与3个线性缓冲阻尼单元,实现航天器间的大容差与弱冲击捕获对接;根据任务需求在对接机构对接平面上设计用于工质传输的机电液接口,以实现航天器间的机、电、液、信息一体化对接。
2 任程分析
小型空间对接机构的主要任务是辅助建立航天器间的刚性连接,并在此基础上为在轨服务提供接口联通与工质传输通道。为确保对接机构满足在轨服务的应用需求,需要对在轨服务任务流程进行分析,以明确不同任务段对对接机构设计的约束与要求。一次完整的在轨服务可概括为5个阶段:
1)捕获条件建立。通过服务航天器相对于受服务航天器的在轨机动,使受服务航天器中的对接部分逐步处于服务航天器对接机构的有效捕获容差范围内,并保持两航天器间的相对位姿,为航天器间的捕获对接提供初始条件。
2)目标捕获与位姿校正。服务航天器利用对接机构实现对受服务航天器的在轨捕获,并通过对接机构实现两航天器间的位姿校正,为航天器间的工质传输通道建立提供便捷条件。
3)弱碰撞刚性对接。在航天器相对位姿偏差校正完成后,两航天器在对接机构的牵引下相互靠拢,同步实现机电接口对接与工质通道对接建立;为避免对服务界面造成破坏,要求对接过程尽量在弱碰撞冲击条件下完成。
4)在轨服务。利用对接机构建立的刚性连接条件、机电接口及工质通道,即可有效开展航天器间的在轨服务任务。
5)解锁分离。在轨服务任务完成后,对接机构需根据任务指令完成工质传输通道封闭、电气断路、机械解锁及航天器间的在轨分离,整个分离过程要求在无冲击条件下完成。
3 对接机构设计
3.1 总体方案
本文设计的小型空间对接机构主要包括主动抓捕机构与被动适配器,如图1所示。主动抓捕机构与被动适配器分别安装于服务航天器和受服务航天器上,在主动机构对被动适配器抓捕对接时,同步实现航天器间的机电、液、气、信息传输通道建立。对接机构主要设计参数如表1所示。
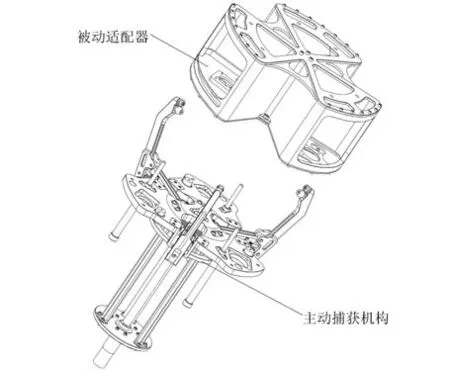
图1 空间小型对接机构Fig.1 Small-sized space docking mechanism
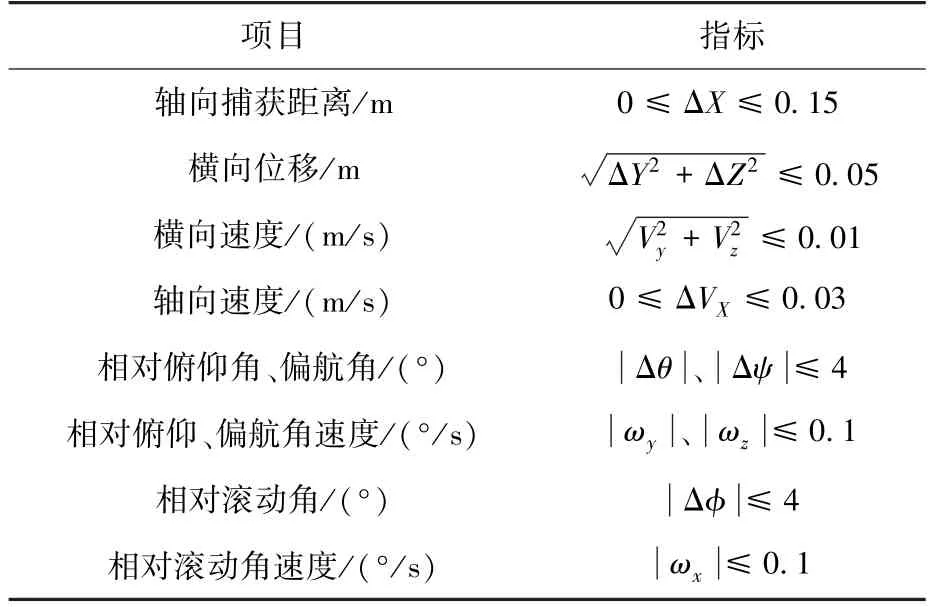
表1 对接机构主要设计参数及指标Table 1 Design parameters and indexes of the docking mechanism
对接机构的工作流程设计如下:
1)服务航天器在轨机动,使受服务航天器上的被动适配器位于主动抓捕机构的位姿容差内;
2)主动抓捕机构中圆周均布的3套捕获手指在驱动系统的驱动下逐步收拢,并与被动机构上的3个V型锥面凹槽配合,实现航天器间的初始位姿校正;
3)驱动系统通过捕获手指带动被动适配器向机构对接平面靠拢,在缓冲阻尼器的配合下完成航天器间的机械对接;
4)在机械对接的过程中,同步完成电气接口及工质传输通道的建立;
5)开展在轨服务后,电气及工质传输通道自动关闭,在缓冲阻尼器的作用下实现航天器间的无冲击分离。
从对接机构的工作过程可以看出,其工作过程与前文分析的在轨服务流程一致,能够覆盖在轨服务各任务段功能需求。
3.2 主动机构
主动抓捕机构设计为3部分:主体支撑结构、四杆式三指抓捕机构及其驱动机构。主体支撑结构上设计有用于对接缓冲的线性阻尼器、判定锁紧力的压力传感器及气/液/电路连接器和断接器及控制器。抓捕机构如图2所示,为实现对被动适配器的位姿校正及可靠抓捕,采用三指圆周均匀布局,3个手指安装于由丝杠伺服系统驱动的移动基座上,通过移动基座平动及各捕获手指背部导向机构的约束来实现3个捕获手指的联动,进而完成对接过程中的三指展开和收拢。整个对接机构只具有一个主动自由度,这种机构设计形式既能通过控制丝杠拉力控制整个系统的连接刚度,又可保证整个抓捕机构的结构紧凑。
小型空间对接机构中的3套捕获手共同集成在统一的圆形基座平台上,并随着基座平台实现整体平动。对接机构中的每个捕获手均由上臂、外臂、内杆、机架等组成,其中上臂和外臂为主承力构件,内杆主要用于运动约束,4个杆件通过运动铰链形成四连杆机构。对接机构单个手指的整体机构如图3所示。

图2 主动抓捕机构Fig.2 Active capture mechanism
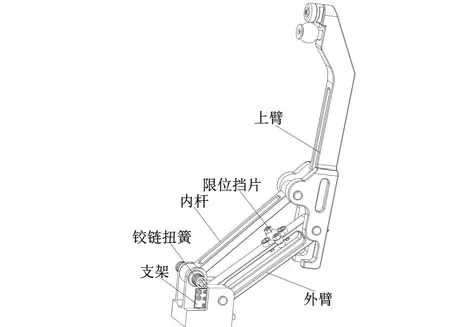
图3 四连杆式捕获手Fig.3 4-link capture claw
单个手指运动包括:①手指张开。对接初始阶段,上臂的滚轮导向槽受导向滚轮约束,四连杆机构在基座平台的带动下沿移动导向支承实现伸长运动;当上臂的滚轮导向槽脱离导向滚轮约束时,四连杆机构在铰链扭簧的作用下展开,张开角度范围由限位挡片确定。②手指收拢。四连杆机构在基座平台的带动下沿移动导向支承实现收缩运动,使上臂的滚轮导向槽进入导向滚轮的约束范围,并随着基座平台的运动逐渐收拢,基座平台运动行程由对接平面的压力传感器阈值确定。
为使整个机构具有较大捕获容差,手指采用非平行四杆机构,设计以捕获包络半径为依据,根据运动关系可得出捕获半径R可近似计算如式(1):

其中:Rd为基座半径(mm);Rb为外臂长度(mm);α为外臂张开角度(°)。为防止四连杆机构收拢时产生运动过盈而导致整个机构受到破坏,在上臂下部增加限位触动开关及机械运动限位。
3.3 被动适配器
被动调整机构包括辅助定位的三瓣壳体以及与主动抓捕机构相对应的机电液接口连接器。被动适配器随受服务航天器发射,集成在航天器的主结构设计中,并在适配器上预先设计有开展在轨服务所需的机电液气接口通路。为配合三指式主动抓捕机构完成受服务航天器的捕获及相对位姿偏差校正,对接机构被动适配器部分采用V型三瓣式结构,在提供较大滚动向姿态容差的同时,通过三点接触方式消除滚动姿态偏差及横向位置偏差。为了保证主动捕获机构捕获手指对被动适配器的可靠抓捕拖动,在被动适配器的V型槽底部设计有与捕获手指配合的手指扣,被动适配器整体结构如图4所示。为消除对接过程中的对接冲击并实现对接面预紧力的动态监测,对接机构被动适配器对接面上设计有与线性阻尼缓冲器相配合的倒锥孔及与压力传感器相配合的结构凸台;此外,被动适配器对接面上还设计有用于支持在轨服务的电气接口及工质传输通道接口。
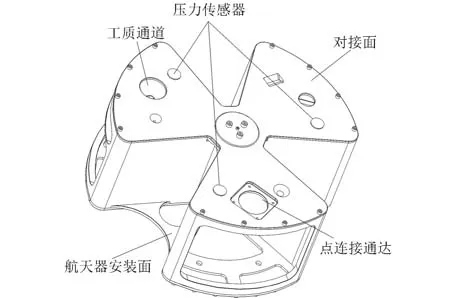
图4 被动适配器结构Fig.4 Structure of the passive adapter
3.4 阻尼缓冲器
为避免航天器对接过程中发生器间刚性碰撞冲击,同时在航天器分离时提供器间分离力,在主动机构的对接面上设计了用于能量耗散的阻尼缓冲器。阻尼缓冲器主要由顶杆、弹簧、壳体等组成,3套阻尼缓冲器呈三角形分布在主动机构的对接面上,相互间协调工作,其结构形式如图5所示。

图5 阻尼缓冲器结构Fig.5 Structure of the damp bumper
4 仿真验证
4.1 仿真设置
为验证设计的空间小型对接机构捕获容差是否符合指标及该机构对接过程中是否存在碰撞、冲击、回弹现象,本文利用Adams多体动力学仿真软件建立对接机构动力学仿真模型,如图6所示。仿真模型的初始对接容差按表1所示,按对接机构设计的最大允许容差指标设定,模型中对接航天器的质量特性参照某任务中航天器质量特性设定(表2)。
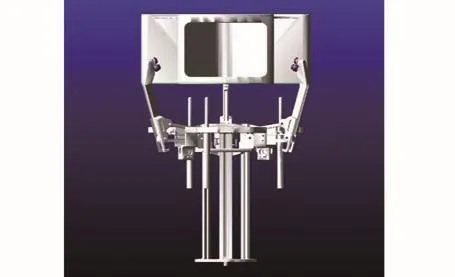
图6 对接机构仿真模型Fig.6 Simulation model of the docking mechanism

表2 航天器质量参数Table 2 Quality parameters of the spacecraft
为真实反映机构对接过程中的动力学特性,在建立对接机构几何特征、对接约束条件等的基础上,定义对接机构接触、摩擦等非线性特性。其中,捕获爪与对接机构被动部分之间根据真实材料特性设置摩擦参数,建立接触约束;缓冲杆与对接机构被动部分在对接过程中的接触碰撞采用式(2)所示Hertz冲击函数模型描述:

其中:F为法向接触力,K为接触刚度系数,C为阻尼系数,δ、δ˙分别表示接触法向嵌入量和穿透速度,e为刚度项的贡献因子。
4.2 对接过程仿真
根据建立的仿真模型,仿真过程(50 s)中所得主动服务航天器与被动受服务航天器间的相对距离随时间变化曲线如图7中所示,主被动航天器相对姿态变化曲线如图8所示。
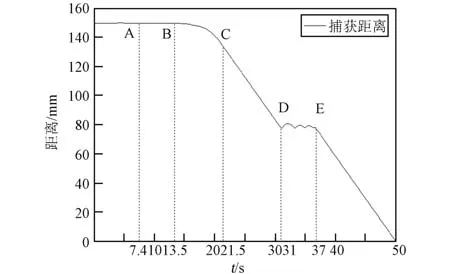
图7 捕获距离变化曲线Fig.7 Curve of the capture distance

图8 航天器相对姿态曲线Fig.8 Relative pose curves of the spacecraft
4.3 对接过程分析
从图8可以看出,在给定的初始捕获容差下,主动机构可以实现对被动适配器的捕获对接,表明对接机构主要设计参数及指标满足设计要求。为便于对机构进行优化设计,进一步对对接机构仿真过程中的力学特性进行分析。从图7中可看出,对接机构的整个对接过程可划分为5个阶段:
1)自由对接阶段(AB段)。主动机构的捕获爪开始合拢,两器无直接力相互作用,两器间的距离不发生变化。
2)加速接近阶段(BC段)。捕获爪夹紧被动适配器花瓣后建立器间软连接,捕获爪在丝杠驱动下以恒定速度收拢,捕获爪与瓣壳间的受力以滑动摩擦力为主,如图9、10所示。
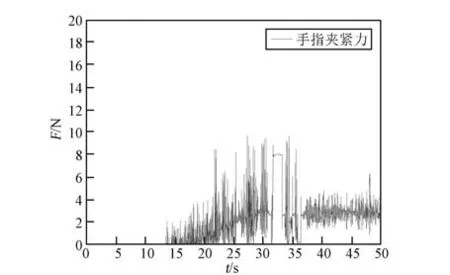
图9 捕获爪夹紧力曲线Fig.9 Clamp force curves of the claw

图10 手指摩擦力曲线Fig.10 Friction force curves of the claw
3)稳定接近阶段(CD段)。到达C点时器间相对接近速度与捕获爪收拢速度一致,被动航天器与捕获爪相对静止,并以恒定速度靠近,滑动摩擦力为0,如图10所示。
4)波动调整阶段(DE段)。瓣壳接触到缓冲器顶端,受到缓冲器中弹簧支撑作用反弹;而捕获爪仍以恒定速度收拢,捕获爪与被动航天器间的相对滑动产生滑动摩擦力并导致被动航天器反复压缩缓冲器,主被动航天器相对距离出现振荡,如图10、11所示。
5)刚性连接阶段(从E点到距离为0处)。捕获爪运动至手指槽,器间刚性连接建立;被动飞行器在缓冲器与捕获爪的合力作用下以恒定速度接近主动飞行器直至对接结束。
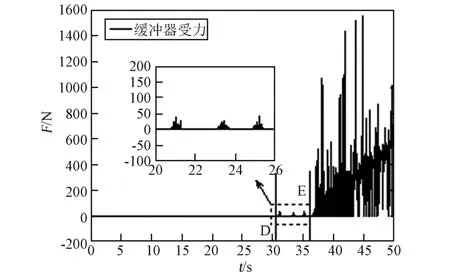
图11 缓冲器缓冲力曲线Fig.11 Buffering force curves of the damp bumper
从对接仿真过程中可以看出,航天器间相对位置振荡主要发生在波动调整段,振荡反映的是阻尼缓冲器能量耗散的主要过程。在这段过程中对接机构被动部分对接面与缓冲杆开始作用,但是捕获爪指并未收回到对接机构被动部分的配合卡槽处,被动航天器在受到缓冲器作用下不断地小幅反弹,通过捕获爪与瓣壳间的滑动摩擦不断耗能,对接过程中的能量耗散曲线如图12所示,耗散能量约占电机输入能力的0.5%,超过99%的电机输入能量被缓冲器以弹簧势能形式吸收。
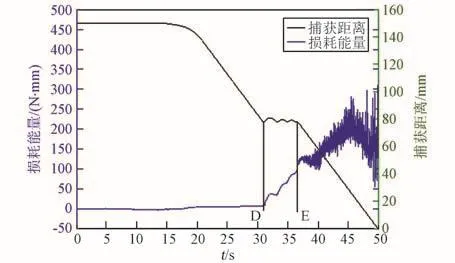
图12 对接机构能量耗散曲线Fig.12 Energy dissipation curves of docking mechanism
忽略对接过程结束时仿真软件计算结果发散,从仿真结果中可以明确看出,单个缓冲阻尼器的最大缓冲行程为80 mm,未达到杆可用缓冲行程的最大范围,具备一定的缓冲行程余量,单个缓冲阻尼器的最大缓冲吸能约为23 J,整个对接仿真过程运动平稳,未出现冲击碰撞与回弹现象。
5 结论
1)设计了可用于在轨服务的三爪式轻小型无人对接机构,可在对接过程中同步建立航天器间的机、电、气、液传输通道,对接机构工作过程与在轨服务任务流程保持一致。
2)经仿真验证对接机构轴向位置捕获容差达150 mm,线速度容差为30 mm/s;径向位置捕获容差为50 mm,线速度容差为10 mm/s;三向姿态容差为4°,角速度容差为0.1°/s。
3)经仿真验证对接机构中设计的阻尼缓冲器能够有效消除对接过程中可能出现的冲击与回弹现象,并可储存超过99%的系统能量,整个对接机构具有较好的能量耗散特性。
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
城市轨道交通研究(2022年6期)2022-07-15
轻兵器(2022年3期)2022-03-21
军民两用技术与产品(2021年6期)2021-10-14
装备维修技术(2021年44期)2021-02-17
宇航材料工艺(2020年6期)2021-01-28
河南科技(2019年11期)2019-09-10
科学与财富(2017年24期)2017-09-06
电脑爱好者(2016年22期)2016-12-16
CHIP新电脑(2015年2期)2015-12-22