基于PSO-SVM的仿生肌电假手反馈控制系统设计*
2020-01-02 06:21隋修武刘乃嘉乔明敏李昊天
传感技术学报 2019年12期
隋修武,刘乃嘉,乔明敏,李昊天
(1.天津工业大学机械工程学院,天津 300387;2.天津工业大学天津市现代机电装备技术重点实验室,天津 300387)
通过有效的肌肉电信号控制智能假肢已成为了目前的研究热点,肌电假肢直接由大脑控制,控制灵活,直观性强,是现代假肢的一个重要的研究发展方向[1-3]。英国Touch Bionics、德国Ottobock等假肢生产公司仅使用简单的阈值控制实现对多自由度肌电假肢的控制,其控制简单,使用不灵活,自由度之间需要切换,极大的影响了使用者的体验。目前,很多学者对肌电信号的模式识别控制进行了深入的研究。Benatti[4]等人利用支持向量机和自定义控制策略融合的方法实现对假手五种动作的控制。Chowdhury[5]、Sridhar[6]与Ryu Jaehwan[7]等人利用多种去噪及特征提取优化算法提高分类器的识别率。上述方法虽可在上位机中达到较高的识别精度,但对高运算能力依赖强,不利于实现假手的实时控制。且目前带有模式识别功能的肌电假手仅能完成简单的动作,缺少对外界物体的感知功能,抓握完全靠使用者的视觉反馈,使用安全性能低。少数拥有闭环反馈的肌电假手多为阈值控制,造价高,适应性差,普通消费者无法承担。研究带有反馈控制的仿生肌电假手是现代上肢假肢发展的重点方向[8-10]。刘畅等[11]提出一种基于触滑觉传感器的模糊逻辑控制方法。章华涛[12]等使用带有触觉和肌电信号控制功能的肌电假手,引入神经网络分析方法和模糊控制方法,调节肌电假手的开合速度和握力大小。但上述反馈控制仅考虑到滑觉信号的影响,滑觉信号判别方式也仅从时域或频域进行特征提取,对不同程度的滑动识别效果较差,且应用对象多为阈值控制的肌电假手,缺少在模式识别假手上的实际应用。
针对上述问题,本文提出一种集模式识别与多感知功能一体化的肌电假手控制方案。利用基于粒子群优化后的支持向量机进行手部动作分类,实现假手的在线模式识别控制。出现抓握意图时,根据物体硬度、滑动程度的不同,加载合适的握力,实现PSO-SVM假手的‘软抓取’。
1 系统总体方案
总体方案如图1所示,该系统主要包括信号的采集模块、上位机离线分析系统和假手控制模块三部分组成。对手部握拳、张开动作的肌电信号进行特征提取,利用基于粒子群优化的支持向量机(Particle Swarm Optimization Support Vector Machine,PSO-SVM)算法对手部动作进行识别并实现对肌电假手的动作在线控制。当假手抓握物体时,通过手指上的传感器组采集物体的滑觉与硬度信息,对滑觉信号进行经验模态分解(Empirical Mode Decomposition,EMD),引入模糊逻辑控制,对滑度、硬度不同的物体实现握力的自适应调节,实现在模式识别假手上的多感知反馈控制。
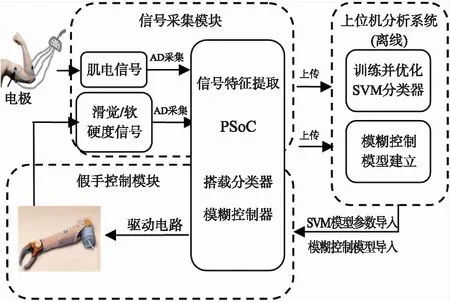
图1 系统总体方案框图
2 模式识别算法
2.1 支持向量机算法原理简介
支持向量机的基本理论是通过寻找最优分类面来实现对未知样本数据的分类。即在特征空间中寻找一个最优分类超平面,使两类样本特征的几何间隔最大。在线性可分的情况下,将最优分类超平面ωxi+b=0归一化后,对样本集数据(xi,yi),i=1,2,…,n,x∈Rd,y∈{+1,-1}进行分类,2/‖ω‖为两样本数据到超平面的几何距离。分类间隔最大就等价于最小化‖ω‖,因此得到一个带约束的优化问题:
(1)
式中:ω为最优超平面的法向量,b为阈值,b∈Rd。
对于支持向量机的线性不可分问题,应当引入松弛变量ξi≥0(i=1,2,…,n)和惩罚参数C,则超平面的求解公式为:
(2)

映射核函数选用高斯径向基核函数:
(3)
式中:σ为核函数参数。
2.2 粒子群优化算法
在支持向量机中,惩罚参数C与核函数参数σ影响着分类器的分类精度,参数的变化极大的影响了分类器的稳定性。通过粒子群优化算法寻找最优参数,提高模型分类的准确性和抗干扰能力。
粒子群优化算法(PSO)由Kennedy和Eberhart等人于1995年提出的一种全局搜索进化算法。算法结构简单,涉及的参数少,计算复杂程度低且容易实现。经过粒子群优化的SVM分类器,在新的特征空间中分类更精确,训练时间更短。PSO-SVM算法流程如图2所示。
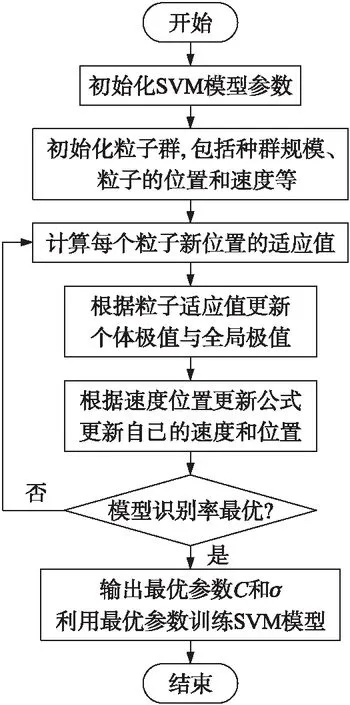
图2 PSO-SVM算法流程图
PSO-SVM算法的基本步骤:
Step 1 首先载入训练集与测试集样本数据并初始化SVM模型参数;
Step 2 利用粒子群优化算法对SVM模型参数中的惩罚参数C与核函数参数σ进行优化,首先初始化粒子群,包括惯性权重ω,加速因子c1、c2,确定粒子初始位置个体极值pBest和粒子群最优位置gBest;
Step 3 计算粒子群中每个粒子的适应度;
Step 4 将每个粒子当前最优位置pBest与粒子群最优位置gBest比较,将最优解设置为当前最好位置gBest。
Step 5 更新粒子的速度和位置,速度和位置的更新方程为:
vij(t+1)=ω(t)×vij(t)+c1×rand()×[pbj(t)-xij(t)]+
c2×rand()×[gbj-xij(t)]
xij(t+1)=xij(t)+vij(t+1)
(4)
式中:pbj(t)为该粒子飞过最好位置,gbj为该种群最好位置,rand()为[0,1]之间的随机数。
Step 6 将优化后的惩罚参数C与核函数参数σ写入SVM分类器模型,用训练集训练模型,判断模型识别率是否为最优,若满足,则输出该最优模型下的惩罚参数C和核函数参数σ;若不满足,返回Step 4重新计算粒子适应度。
3 肌电假手控制策略
图3为该系统的控制方案流程图,分为动作识别、触觉判别、硬度感知、滑觉感知、加载力估算五个阶段。通过控制电机运转达到最适合的握力值,保证物体的稳定抓握。
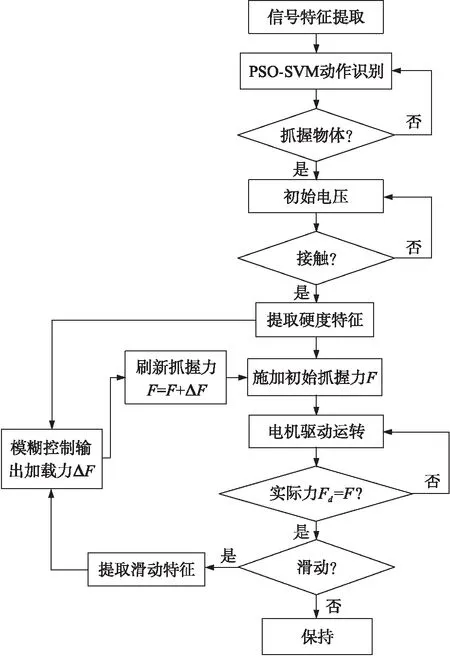
图3 控制系统软件设计流程图
3.1 传感器的选择
为实现肌电假手的‘软抓取’功能,综合考虑肌电假手的抓握要求,选择动态范围宽,过载能力强,静态滑动信号响应快的压阻式传感器RFP602为滑觉传感器;选择质地柔软重量轻,耐冲击,拥有较高的压电系数,测量灵敏度更高的有机压电材料聚偏氟乙(PVDF)为软硬度传感器。均将其贴装于肌电假手的手指内侧。
3.2 触觉信号判断原理
肌电假手与物体接触时,PVDF压电传感器受力变形产生电荷,经电荷放大后产生一个幅值较大的电压脉冲信号。通过对不同物体进行抓握接触对比后,选取合适的触觉阈值进行触觉判断。当PVDF压电传感器信号大于触觉阈值xa时,即判断假手与物体接触。
3.3 软硬度信号判断原理
物体的软硬度是物体属性中的一个重要方面,软硬度实则为物体抵抗变形的能力。以同样的速度抓握不同物体时,形变大的较软,反之则较硬。同时,PVDF传感器产生的压电信号是一个正比于接触压力的值,与较硬物体接触时压电信号上升快。将触觉阈值xa后固定时刻内的传感器电压的累加值作为物体软硬度的度量。
(5)
式中:xa为触觉阈值,xi为信号采样值,i为接触时刻,n为采样长度。
3.4 滑觉信号判断原理
物体滑动时,压阻传感器会产生幅值较小的高频摩擦振动信号。仅从时域中对滑动信号进行特征提取,通过阈值选择的方法会出现严重的误判问题。利用经验模态分解法对滑觉信号在时频域上进行特征提取,与其他特征提取方法相比,经验模态分解法更加直观、直接、自适应[13-15]。
经验模态分解(EMD)是Norden E Huang等人提出的一种新的信号处理方法,将信号中存在的不同尺度下的波动或变化趋势逐级分解开来,产生一系列具有不同特征尺度的特征模态函数(Intrinsic Mode Function,IMF)。对于非平稳的滑动信号,经过EMD方法得到的各阶IMF分量都是平稳的,是从滑动信号本身的特征时间尺度出发对信号进行分解,没有固定的基函数,自适应强,得到的每个IMF分量具有明显的物理意义,体现了滑动的真实过程,如图4所示。
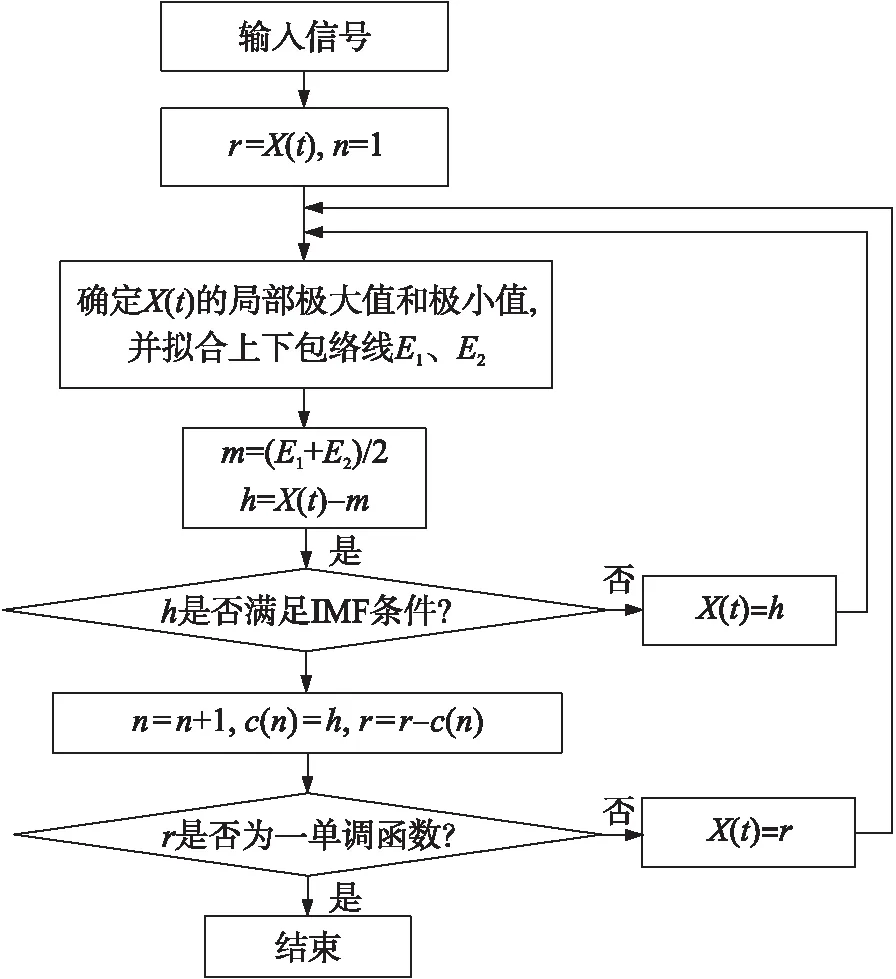
图4 经验模态分解算法流程图
EMD具体步骤如下:
①对于给定任意滑觉信号X(t),首先确定滑觉信号X(t)上的所有极值点,用三次样条曲线分别连接所有极大值点和极小值点形成上、下包络线。X(t)与上下包络线的均值m1的差记为h1。
h1=X(t)-m1
(6)
若h1存在负的局部极大值和正的局部极小值,则将其视为新的滑觉信号X(t),重复上述步骤直至满足上述两个条件时,将其记为第一阶IMF,记为IMF1。
②将IMF1从滑觉信号X(t)中分离构成新的信号r1,重复①的筛选步骤,直至残余信号成为单调函数,不能再筛分出IMF分量。
r1=X(t)-IMF1
rn=rn-1-IMFn
(7)
③当满足终止条件时,循环结束。滑觉信号X(t)可表示为n个IMF分量和一个残余项的和,即:
(8)
式中:rn(t)表示残量,代表信号中的平均趋势,IMFj(t)则分别代表信号从高到低不同频率段的成分。
3.5 假手握力的模糊控制方法设计
正常人手抓握物体时,为保持抓握稳定,对刚度较强的物体会施加更大的握力,而对较软物体施加较小握力。肌电假手模拟人手的抓握过程,建立人手握力的反射加载力的二输入单输出的模糊控制器。握力模糊控制器如图5所示,模糊控制器输入端引入两个输入分量:滑动程度量Q和物体硬度量K。输出变量为所需加载的握力F。加载力F变化时,通过控制电机转动到达合适的抓握力。
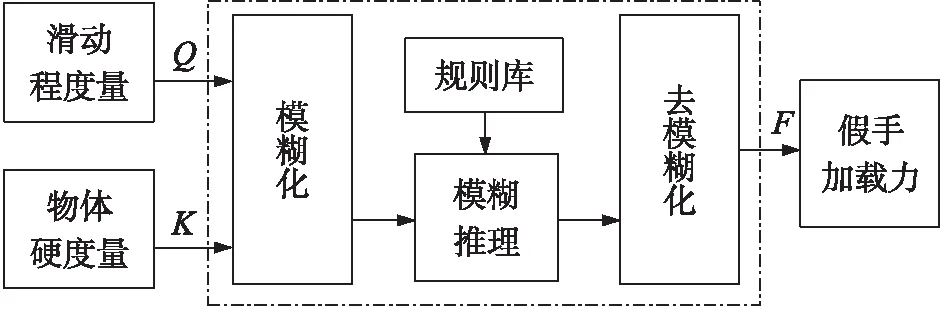
图5 加载力模糊控制模型
将输入变量和输出变量模糊化,对输入变量进行模糊语言的设定,根据输入输出变量的分级组合定义假手加载力的模糊规则,得到模糊控制器的规则库,推理结果采用重心法反模糊化,控制器的输入输出关系图如图6所示。图中坐标分别为物体硬度量K、滑动程度量Q和加载力F。
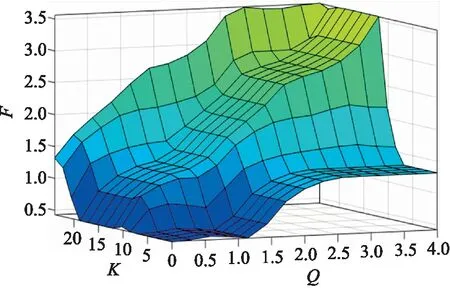
图6 模糊控制输入输出关系图
4 实验及结果
为验证PSO-SVM及反馈控制在假手上的控制效果,设计了PSO-SVM动作模式识别实验、硬度特征分析实验、滑觉特征分析实验、和基于PSO-SVM的多感知反馈控制实验。实验中采用丹阳假肢厂生产的三自由度肌电假手为控制对象。
4.1 PSO-SVM动作模式识别实验
将电极贴合在尺侧腕伸肌、尺侧腕屈肌表面,经过信号调理后,完成对两种动作肌电信号的采集。将每名受试者150组特征向量作为训练集,构建标准粒子群支持向量机(PSO-SVM)后将其植入至PSoC片上系统中,控制肌电假肢实现在线动作。每名受试者每个动作做50次并观察假手的实时动作,在线控制识别结果如下:

表1 肌电假手在线识别正确率
从表1中的识别结果可以得到,三名受试者握拳、张开动作的在线识别正确率高达93.3%、94%。总体识别率高达93.6%,假手控制效果稳定,控制实时性高,其中一名受试者控制假手的效果如图7。

图7 假肢两种动作控制效果图

图8 抓握实验
4.2 硬度特征分析实验
以固定初始握力抓握不同物体,实验现场如图8。通过多次抓握,选择合适的触觉阈值xa,对触觉阈值xa后的128个点的求和即为软硬度特征值,如图9所示,本文触觉阈值设置为2.35 V。
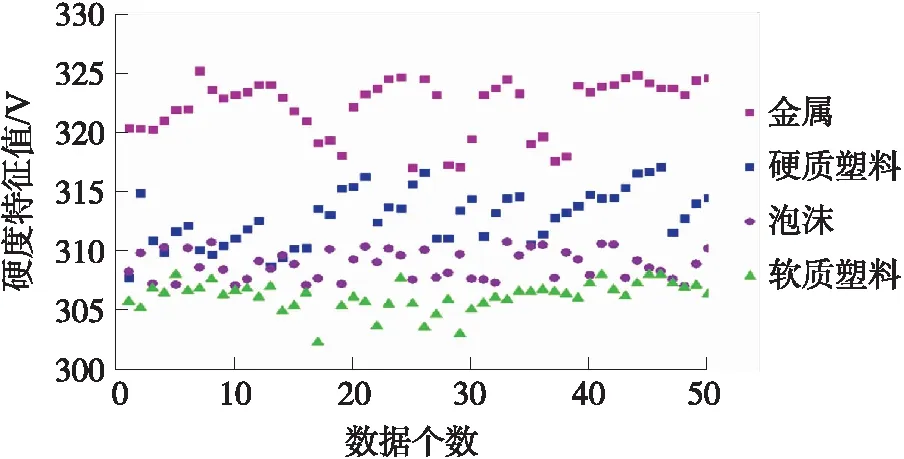
图9 软硬度特征值
由图9可见,假手对硬度不同的物体识别程度高,随着物体硬度的增大特征值越来越明显,硬度差异大的物体分类效果明显,硬度相近的物体也具有着较好区分特性。
4.3 滑觉特征分析实验
以同样的固定初始力抓握物体,抓握稳定后,在其上分别加载50 g、100 g、150 g砝码使其滑动。对采集的滑觉信号进行经验模态分解后发现,IMF2分量可以有效的对滑动程度进行区分,为使效果明显,以每216点abs(IMF2)的和为滑觉特征值。如图10所示为40组在不同滑动程度下的滑觉特征值。实验结果显示,经EMD分解后的滑觉特征在不同滑觉状态下的分布较为集中,可以明显的对滑觉状态进行区分。
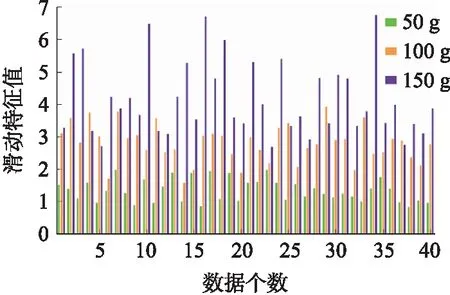
图10 滑觉特征值分布图
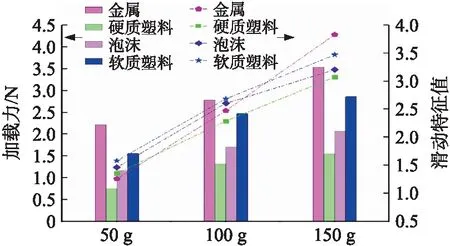
图11 实验结果
4.4 基于PSO-SVM肌电假手的多感知反馈控制实验
为了测试整个肌电假手的控制性能,将编写的控制程序植入硬件系统中。建立基于PSO-SVM的多感知反馈控制实验。受试者通过肌肉控制假手抓握不同物体,进入抓握稳定状态后,加载重量不等的砝码以测试整体控制性能,实验结果如图11所示。
实验结果显示同种物体在不同重量砝码的作用力下滑觉特征、加载力特征差异较大,且随着作用力的增加呈上升趋势;硬度不同的物体在相同重量砝码作用力下的滑觉特征差异不大,但加载力差异较大且随着滑动程度的增加差异越来越明显。同时,在PSoC Creator编译环境中对该系统进行在线仿真测试,系统从AD采集开始到控制结果需要226 ms,小于300 ms,符合假肢控制的实时性要求。
5 结论
本文提出了一种基于PSO-SVM的仿生肌电假手反馈控制系统,利用PSO-SVM算法对手部2种动作进行识别,将其植入本系统后识别率达到93.6%;有抓握意图时,利用手部传感器组感知物体滑觉与硬度信息,引入EMD分解滑觉信号,建立模糊逻辑控制,对硬度、滑动程度不同的物体实现握力的自适应调节。该方法模仿人的抓握方式,具有很强的适应性并给残疾人提供更好的本体感受,实现了假肢在抓握目标过程中及时、精确的响应控制。能够可靠的完成抓握控制任务,具有较高的稳定性,实现了滑觉、硬度反馈在模式识别假肢上的实际应用。
猜你喜欢
养生月刊(2022年5期)2022-11-26
现代临床医学(2022年5期)2022-09-28
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
家庭医药·快乐养生(2019年2期)2019-03-04
制造技术与机床(2018年11期)2018-11-23
意林(绘英语)(2018年1期)2018-04-28
现代电生理学杂志(2016年4期)2016-07-10
文体用品与科技(2016年5期)2016-04-08
体育科学研究(2015年4期)2015-02-28