
基于量子遗传算法的雷达组网布站分析
2020-01-10 01:10宫志华田家磊陈春江王佳宋
弹道学报 2019年4期
刘 洋,宫志华,田家磊,陈春江,王佳宋
(中国人民解放军63850部队,吉林 白城 137001)
在武器系统试验靶场,获取高精度弹道参数是评定和分析武器打击精度的重要内容。在对新研武器装备性能进行试验鉴定中,雷达系统作为靶场重要测试设备,采用雷达组网测试方式,通过构建合理的设备布站方案,可以对弹道目标进行高精度跟踪测量,使弹道参数测量精度达到最优。
雷达组网布站问题是典型的高维度非线性目标函数求解问题,一般的数学解析法或传统优化方法无法求解,必须借助智能优化算法进行分析和求解,如人工神经网络[1]、遗传算法[2-3]、量子遗传算法[4-6]、蚁群算法[7]、模拟退火[8]、粒子群算法[9]以及多种混合算法[10-11]等,这些以模拟自然生态机制求解复杂优化问题的仿生人工智能优化算法,为解决复杂问题提供了新的思路和手段。
其中,量子遗传算法(quantum genetic algorithm,QGA)结合量子计算与进化算法优势,以量子态特性为基础,采用量子位概率编码来表示染色体,通过不断更新的量子旋转门的作用来更新和优化种群,达到对目标函数寻优的目的,具有较高的全局搜索效率和种群多样性。
本文设计量子遗传算法,对雷达组网最优布站方案进行高效搜索,着重对量子遗传算法中2种旋转角策略的影响进行比较分析,为该工程领域应用量子遗传算法提供参考借鉴。
1 优化算法设计
目标函数是各种优化算法需要解决的以数学模型体现的问题。针对雷达组网优化布站所要达到的目的,构建目标函数。优化目的可以包括很多,如测量精度、跟踪能力、作用时间等,为实现这些目的需要对设备的布站情况进行最优化设计。另外,雷达设备布站还需要面临一些相关的约束条件,如试验区域范围、测量弹道段、跟踪角度限制和避开火焰干扰等。因此,优化布站问题是通过构建一个或多个目标函数及相应约束条件函数(罚函数)来描述的,是一个非常复杂的多参数、多峰值寻优问题。本文采用量子遗传算法解决该领域问题。
1.1 量子编码

(1)
从遗传学的角度看,这也是所求解优化问题的解空间中的一个染色体或一个种群个体。
1.2 量子旋转角策略
量子旋转门是量子遗传算法增加群体的多样性具体措施,更新过程为
(2)
式中:(αiβi)T和(α′iβ′i)T为染色体第i个量子比特旋转门更新前后的概率幅;Δθi为旋转角。旋转角Δθi操作策略直接影响量子遗传算法效果,文中确定采用表1旋转角Δθi调整策略[6]。表中,Xi为当前某二进制编码个体的第i位;Xbest,i为当前二进制编码最优个体的第i位;f(X)为适应度函数;s(αi,βi)为旋转角方向;Δθi为旋转角。根据表1所列的选择策略,将当前某个体的适应度f(X)与该当前最优个体的适应度值f(Xbest)进行比较,如果f(X)>f(Xbest),则调整当前个体相应量子比特,使得几率幅对(αi,βi)向着有利于Xi出现的方向演化;反之,则调整当前个体相应量子比特,使得几率幅对(αi,βi)向着有利于Xbest出现的方向演化。
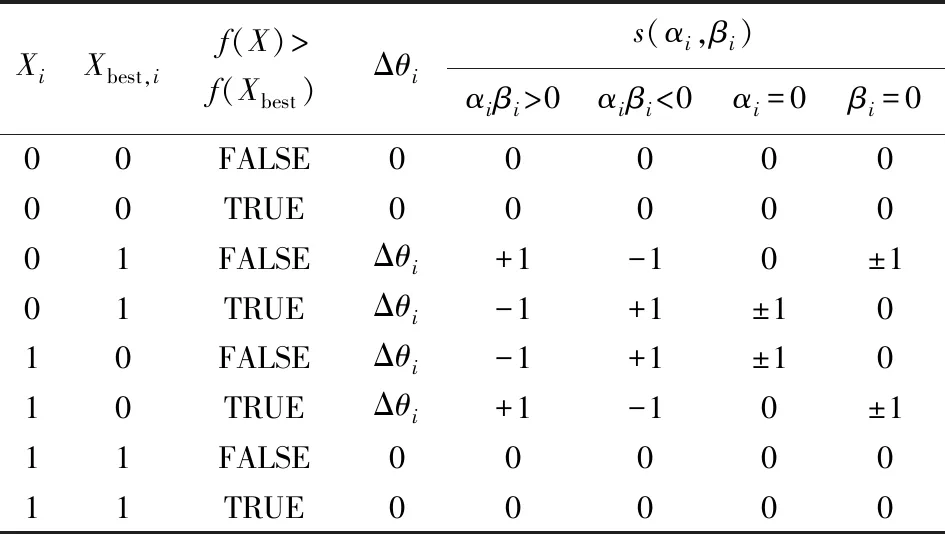
表1 旋转角选择策略
1.3 算法设计
应用量子遗传算法,结合实际问题特点,设计了具体的计算流程,如图1所示。
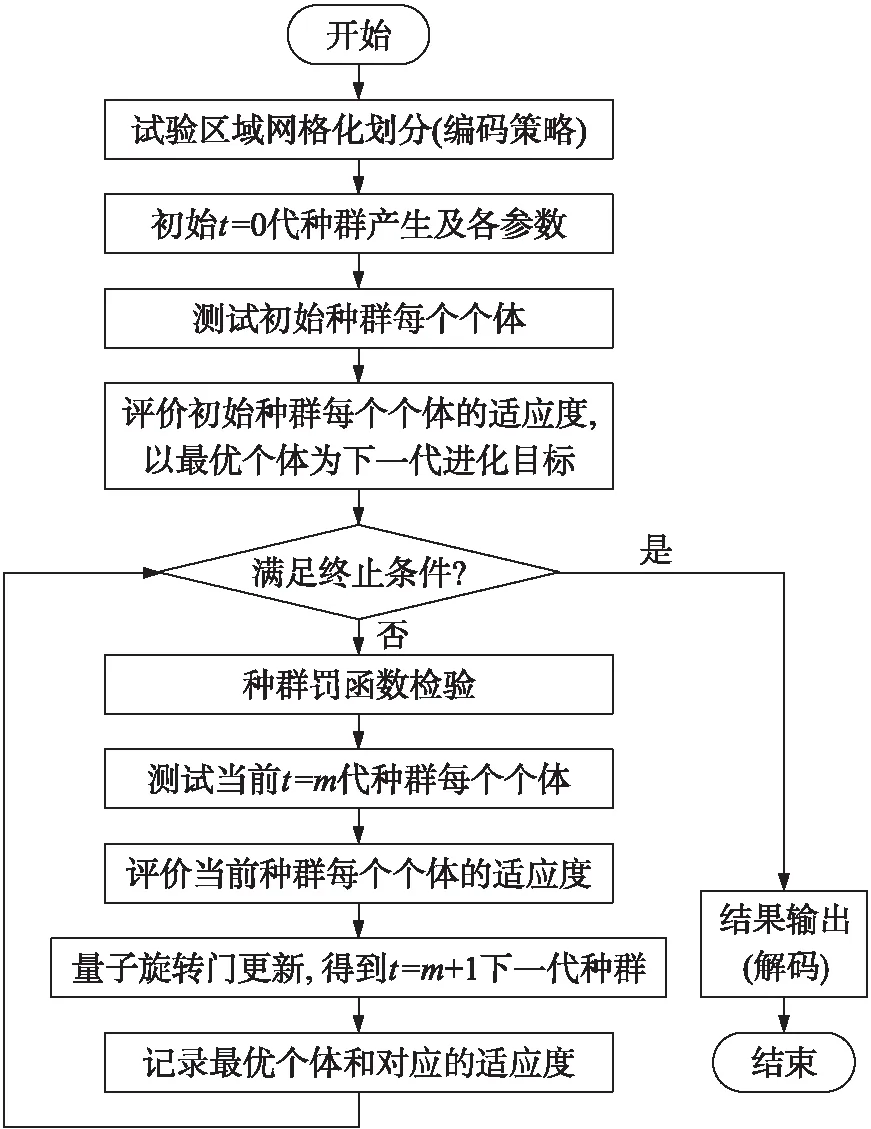
图1 量子遗传算法计算过程流程图
1)编码策略。
首先以试验区域范围和搜索精度为基准,对试验区域进行二进制网格化划分。
2mO-1≤(UO-LO)/k≤2mO
(3)
式中:O代表测试设备站址空间三维坐标(x,y,z),x为纵向,y为高程,z为横向。UO、LO分别为设备站址在试验区域三维坐标(x,y,z)的上限值和下限值,kO为网格划分尺度,也体现了搜索精度,mO为二进制位数。基于此原则,测试设备站址坐标是以二进制编码表示,假设n台雷达设备组网测量,则位数为n×(Mx+My+Mz)构成了解空间中的一个染色体。
相反,通过解码可以确定测试设备站址坐标的真实值PO:
(4)
式中:gO为搜索得到的测试设备站址坐标最优染色体。
2)初始种群。
为满足种群的多样性,在确定初始群体规模数量后,可随机产生初始种群的个体。在有罚函数的情况下,对于随机产生的初始种群,进行了条件判断,若不满足罚函数的种群个体数大于群体规模的1/3,则重新生成,直到获得合适的遗传种群为止[10]。
3)种群编码。

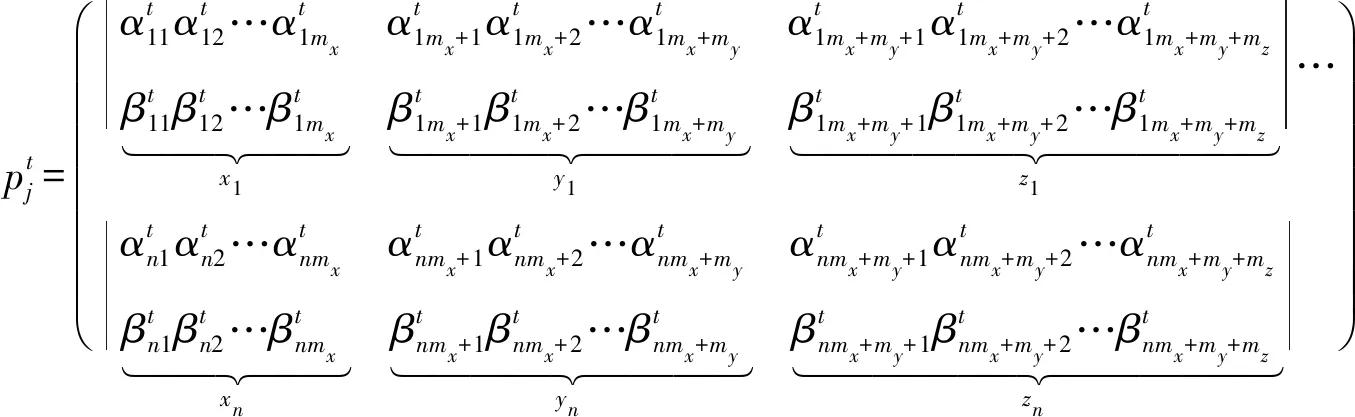
(5)
式中:t为遗传代数。
4)适应度函数设计。
组网测量模式下,弹道参数解算模型多为联合解算模型,包括逐点最小二乘估计、递推最小二乘、扩展卡尔曼滤波、无迹卡尔曼滤波和基于样条函数约束的EMBET融合解算方法[12]等,这些方法都对设备优化布站有具体要求。

(6)
(7)
显然,某个染色体的适应度函数最小,说明测试设备按照这样的站址坐标数据进行布站可以确定弹道参数测量精度达到最优。
5)量子旋转门更新策略。
根据进化进程设计动态调整量子门的旋转角大小。采用了一种通用的旋转角调整策略来实现量子变异:
θ=Δθ·s(αi,βi)
(8)
式中:Δθ为旋转角的大小,s(αi,βi)为搜索方向函数,按照表1取值。
本文为了比较说明量子旋转门更新策略对最终搜索效果的影响,Δθ取值设定为2种策略,分别为Δθ=0.1π·e-t/tmax,Δθ=0.1π·et/tmax,t和tmax分别为迭代次数和最大迭代次数,即策略1在算法运行过程中随着进化代数的增加逐渐减小旋转角;策略2在算法运行过程中随着进化代数的增加逐渐增大旋转角。
6)算法终止条件。
如果在t=l次迭代之后,适应度函数的取值不再明显减小,那么l代之后的个体即为可获得的最优个体。本文结合试验经验,规定一个大于l的常数值tmax作为最大迭代次数,即终止条件。
2 实例分析
2.1 问题设计


为接近实际情况,考虑测试设备实际测量水平,在基于理论弹道反算获得的各设备原始测元的基础上加入了相应的误差数值,如表2所示。表中,R为距离,A为方位角,E为俯仰角,v为径向速度。
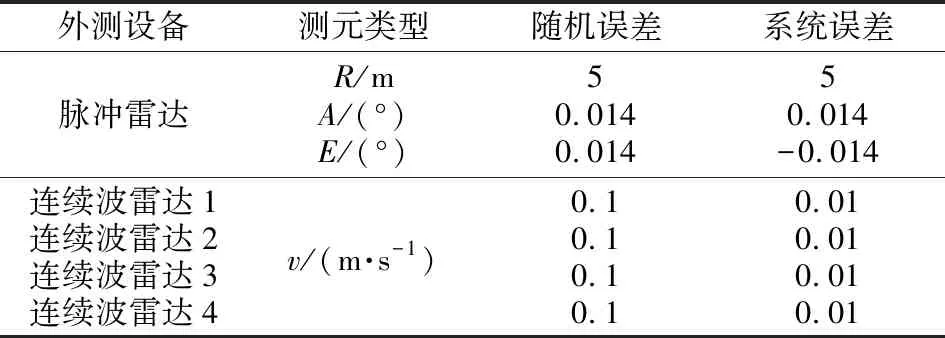
表2 组网测试设备误差值设定
2.2 计算分析
基于上述量子遗传算法设计流程,首先对试验区域进行网格化划分,设定设备站址坐标(x1,z1,x2,z2,x3,z3,x4,z4)的实数值用二进制表示,位数均为12,则x坐标方向的搜索精度为11.2 m,z坐标方向的搜索精度为2.0 m。
只考虑弹道速度测量精度,即适应度函数为式(6)。按照量子旋转门更新策略1和策略2原则进行目标函数的优化搜索,解算获得的设备最优站址坐标数值如表3所示,设备站址和弹道的最优布站平面几何关系如图2所示。
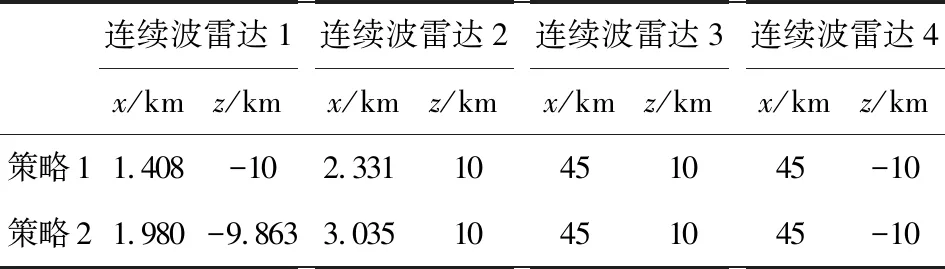
表3 最优设备布站点位坐标
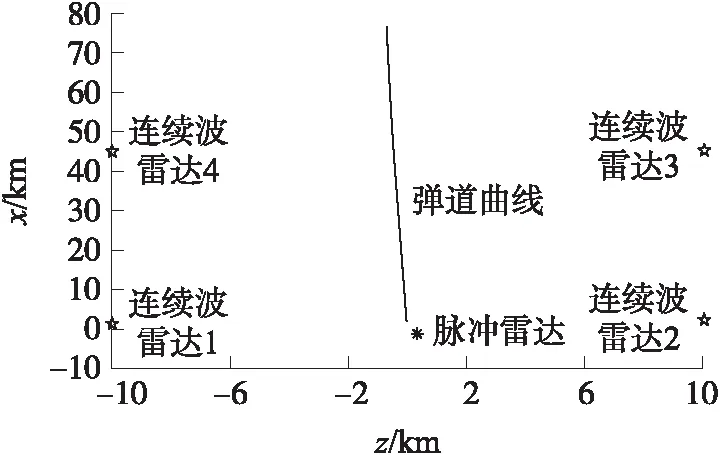
图2 优化布站和弹道平面几何关系
从表3中可以看到,基于量子遗传算法原理,采用2种旋转角策略,搜索到的设备最优布站结果基本一致,弹道速度测量误差(Δvx,Δvy,Δvz)也基本一致,如图3所示。
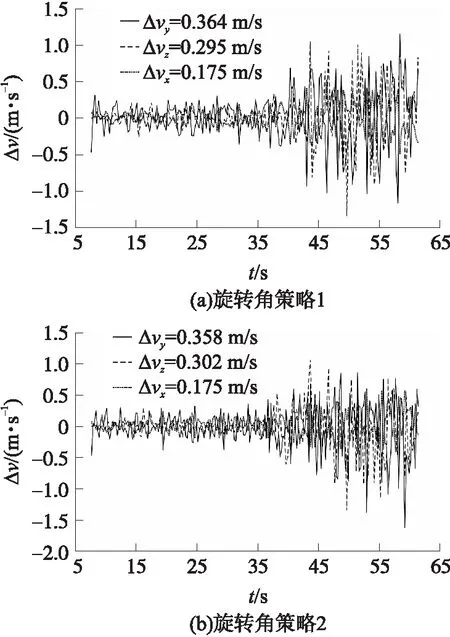
图3 2种布站方法测量误差分析
图4是采用2种旋转角策略进行量子遗传解算的200次迭代过程曲线。从图中可以看到,旋转角逐渐变小策略的优化搜索迭代过程很快收敛到最优解,但旋转角逐渐变大策略的优化搜索迭代过程收敛到最优解比较慢。
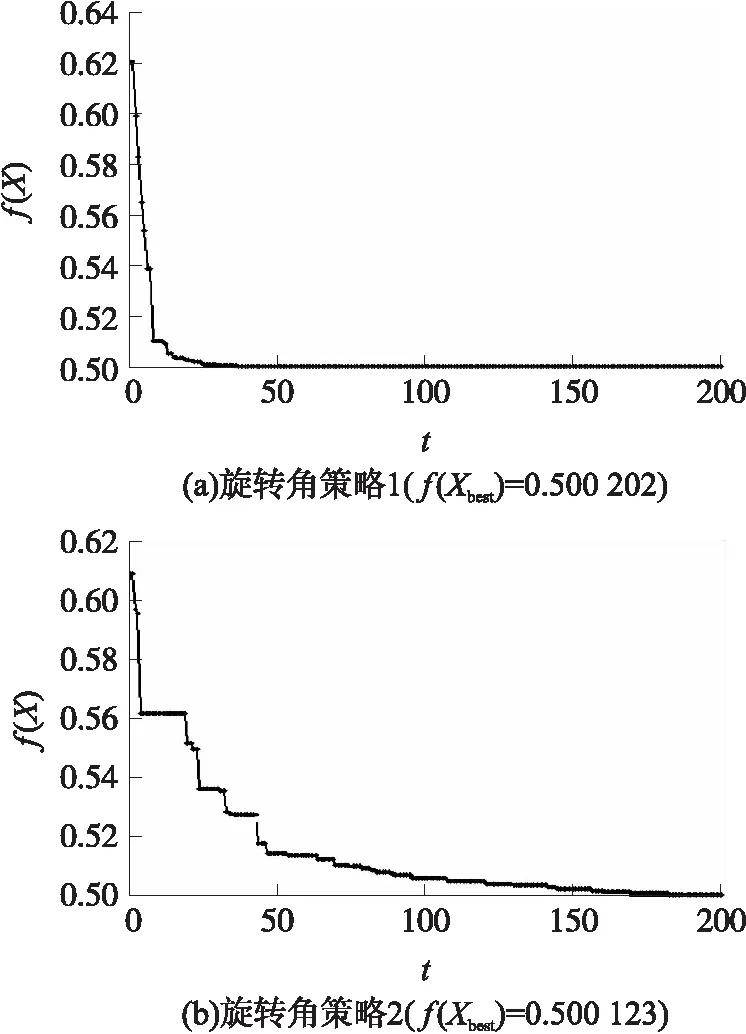
图4 量子遗传算法过程
3 结束语
采用量子遗传算法搜索雷达组网测试最优布站方案,为武器试验鉴定高精度弹道参数的获取提供了保证,对评估武器性能意义重大。到目前为止,在采用量子遗传算法的工程应用实例中,多采用旋转角变小的更新策略,目的是使搜索最优解的过程可以快速收敛,提高运算效率,但是这样带来的不利影响是使最优解陷入局部最优的概率加大,为此又有量子交叉、量子变异和量子灾变等操作[13],以摆脱局部最优解的可能。
采用旋转角变大的更新策略,是一种摆脱局部最优解的有效方法,只要适当延长进化代数,在保留当前最优解的条件下,通过不断地打乱某个个体当前的进化方向,恰恰丰富了种群的多样性,使获得全局最优解的概率增大,也不失为一种可信的搜索策略。
量子遗传算法具有概率搜索特性,针对具有多参数、多峰值的目标函数,由于初始种群的选择、旋转角策略和进化代数等遗传参数的概率性设计因素,搜索到局部最优解的概率是必然的。因此,为大概率、可靠地获得全局最优解,建议在实际应用过程中适当进行蒙特卡罗试验。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
北京航空航天大学学报(2021年7期)2021-08-13
汽车工程(2021年12期)2021-03-08
数字海洋与水下攻防(2020年5期)2021-01-04
空气动力学学报(2019年5期)2019-12-31
电子制作(2019年16期)2019-09-27
电子制作(2019年7期)2019-04-25
电子制作(2019年24期)2019-02-23
科技资讯(2017年7期)2017-05-06
中国新通信(2016年17期)2016-11-17
