
复杂海洋环境噪声下甚低频声信号检测方法
2020-02-06 00:35马石磊王海燕申晓红何轲董海涛
兵工学报 2020年12期
马石磊, 王海燕, 申晓红, 何轲, 董海涛
(1.西北工业大学 航海学院, 陕西 西安 710072; 2.海洋声学信息感知重点实验室(西北工业大学), 陕西 西安 710072;3.陕西科技大学 电子信息与人工智能学院, 陕西 西安 710021)
0 引言
随着潜艇消磁降噪等措施的不断完善,其本身的自防护能力不断提高,尤其是安静型潜艇、无人潜航器等水下移动目标,其中高频声学特性被不断削弱,导致其探测难度增大。潜艇甚低频信号是指由潜艇航行时所产生的无法被抑制的甚低频段辐射噪声[1-2]。因此利用潜艇辐射的甚低频信号进行探测,是实现对潜艇远程探测的有效技术手段,是潜艇被动探测系统远距离感知目标的重点发展方向之一。潜艇产生的甚低频辐射噪声信号频率在100 Hz以内[3-5],但是海洋环境低频噪声复杂多变且噪声级很高,因此研究复杂海洋环境噪声下的甚低频声信号检测是很有必要的。
要在复杂的海洋环境噪声中检测潜艇辐射的甚低频信号,目前存在两个亟需解决的问题,一个是海洋低频环境噪声复杂多变,难以用理想的高斯噪声模型描述;另一个是弱信号远距离传播时的低信噪比检测难度大。
海洋低频环境噪声极其复杂,其来源主要有湍流压力起伏噪声、海洋哺乳动物叫声、行船低频噪声、地震和爆炸声等,具有一些很强的脉冲噪声,传统的高斯分布显然已经不能准确地描述此类噪声[6]。特别是最近的研究发现,海洋低频噪声极其复杂[7-9],因此需要建立更加广义的列维噪声模型来描述复杂的海洋低频环境噪声。
对于低信噪比检测难问题,需要研究基于随机共振的弱信号检测方法。随机共振方法是随着非线性动力学而发展起来的一种用于微弱特征信号增强检测的新方法。它通过一个非线性系统,利用将噪声的部分能量转化为信号能量的机制来提高输出信噪比,提升系统的检测性能[10-12]。近年来,随机共振在微弱信号检测领域已经得到了长足发展,但是大部分研究都局限在高斯背景噪声条件下,并已经证明在特定的噪声强度及系统参数等条件下,随机共振系统理论和实验上的有效性[13-16]。然而在列维噪声背景下的随机共振,目前的研究只是分析单个系统参数的变化对输出信噪比的影响,没有针对列维噪声进行随机共振系统的全部参数最优化处理[17-19]。
本文用更加广义且符合实际的列维噪声模型描述复杂海洋低频环境噪声,并用易于实现的对数矩法估计相应列维分布参数;研究列维噪声下的2阶双稳态随机共振,建立2阶双稳态匹配随机共振系统,实现在强背景噪声下检测甚低频弱信号;进行计算机仿真实验和外场湖试,验证系统在复杂海洋环境下检测水下航行器辐射甚低频声信号的可行性和有效性。
1 复杂低频环境噪声建模及参数估计
列维分布是列维在研究广义中心极限定理时提出的,列维分布是一种广义的高斯分布,其最重要的特征是概率分布上的稳定性和统计密度函数的代数拖尾。因此列维分布具有比高斯分布更广泛的适用性,甚至可以描述许多不满足中心极限定理的数据。但是列维分布不存在封闭的概率密度函数,一般用特征函数来表示,若变量X服从列维分布,则记为X~L(α,β,σ,μ),其特征函数为

(1)
式中:k为列维分布的特征函数自变量;σ为尺度参数,σ∈(0,∞),它是关于分布样本偏离均值的度量;α为特征指数,α∈(0,2],它决定了列维分布的拖尾厚度,α的值越小,分布的拖尾越厚,当α=2时变为高斯分布;β为偏斜参数,β∈[-1,1],它决定了分布的对称程度;μ为位置参数,μ∈R,R为实数集。列维噪声的噪声强度D可通过公式D=σα计算得到。
为了用列维分布描述海洋环境噪声,必须估计出上述列维分布的4个参数。由于列维分布不存在概率密度函数,描述传统的基于显式密度函数的统计方法无法使用,其高阶甚至2阶统计量都是不存在的。因此引入分数低阶矩的概念[20],分数低阶矩与特征函数中的特征指数α和尺度参数σ的关系为
E(|X|p)=C(p,α)σp/α,
(2)

令Y=lg |X|,若随机变量X满足E(Y)=E(lg |X|)<∞,则X称为对数阶随机变量,其矩生成函数为
(3)
因此列维分布具有有限的对数矩,以下分别列出其前3阶对数矩:
(4)

由以上结果可以看出,Y的2阶矩以及高阶矩都只与特征指数有关。由于高阶矩估计精度不够,用1阶矩和2阶矩来估计所需要的列维分布参数。一般认为水下环境噪声是无偏的且位置参数为0,且最关心的就是环境噪声的噪声强度,列维噪声的噪声强度由特征指数和尺度参数决定,因此主要估计列维分布的特征指数α和尺度参数σ,其估计值分别由(5)式和(6)式计算如下,
(5)
=cosexp((L1-ψ0)+1),
(6)
式中:
(7)
为了检验估计方法的有效性,用Janicki-Weron算法产生α=1.5、σ=1的列维噪声[21],并用上述方法进行相应参数估计。图1和图2所示分别为特征指数α和尺度参数σ的估计结果,可见其估计均值分别为1.501 4和1.108 0,估计方差分别为0.003 4和0.009 4,检验了对数矩方法估计列维噪声参数的有效性,表明可以用本文方法来估计实测复杂环境噪声参数。

图1 列维噪声特征指数估计Fig.1 Estimation of Lévy noise characteristic index

图2 列维噪声尺度参数估计Fig.2 Estimation of Lévy noise scale parameter
2 匹配随机共振系统
2.1 列维噪声下的2阶随机共振
随机共振方法是随着非线性动力学而发展起来的一种用于微弱特征信号增强检测的新方法。不同于传统微弱信号检测方法的抑制噪声,它通过一个非线性系统使信号和噪声达到共振,利用将噪声的部分能量转化为信号能量的机制来提高输出信噪比,提升检测性能。
2阶双稳态随机共振系统可以由非线性方程[11,16]描述为
(8)
式中:γ为2阶系统阻尼参数;s(t)表示系统输入信号,s(t)=Asin (2πf0t),A为输入信号幅值,f0为输入信号频率,t为时间变量;η(t)为列维噪声;V(x)为随机共振系统势函数,
(9)

图3 系统势函数Fig.3 System potential function
在列维噪声背景下,求解2阶非线性方程(8)式是很困难的,因此采用数值解法求解。首先,将2阶方程化简为2个1阶方程:
(10)
然后用列维噪声下改进的4阶龙格·库塔法求解(10)式,得
(11)

则通过数值解法可以得到列维噪声下的随机共振系统输出序列x(n),n为输出序列的点数。
2.2 匹配随机共振系统参数
在双稳态系统没有产生共振时,系统输出将在某一势阱内进行局部运动,只有当信号、噪声和系统达到随机共振时,系统输出才会形成2个势阱间的大范围跃迁运动。因此通过考虑产生随机共振的条件和系统输出的稳定性两个因素,确定2阶双稳态随机共振系统的匹配参数范围[22]。
(12)
另一个需要考虑的是频率条件,克莱美逃逸率是信号在纯噪声条件下双稳态系统在2个稳态间发生跃迁的速度,当其等于2倍信号频率时产生共振,即
(13)
式中:rk为克莱美逃逸率。
为了简化匹配参数分析,建立判别函数如下:
(14)
当判别函数F=1时,双稳态系统达到随机共振状态,分析判别函数可以发现,其受到信号频率、噪声强度、系统参数影响,为了使系统达到匹配共振,根据信号频率和噪声强度来确定匹配的系统参数。根据绝热近似理论及线性响应理论,在弱信号输入2阶双稳态随机共振系统时,输出信号比近似表达式为
(15)
式中:ΔV为随机共振系统的势垒。
(15)式求关于ΔV的1阶导数,可以得到最优势垒高度为
(16)
从而得到a、b和D的匹配关系为
(17)
(17)式代入(14)式并令其等于1,可以得到阻尼参数的匹配值为
(18)
针对微弱信号检测,信号幅度远小于噪声强度(A≪D),(16)式和(17)式代入(12)式,可得
(19)
即得到系统参数a的匹配值为
(20)
综上所述,可以得到2阶双稳态随机共振系统的匹配参数分别为
(21)
式中:信号频率f0和噪声强度D可由先验估计得到。由此,通过选取系统匹配参数,可以建立2阶双稳态匹配随机共振系统。
2.3 匹配随机共振信号检测器
对于在列维噪声激励下的弱信号检测问题,采用二元假设检验的方式进行分析。H0为零假设,即只有噪声、没有目标信号;H1为备选假设,即有目标信号;s为需要检测的弱信号;η为列维背景噪声。两个假设的判断公式如下:

(22)
式中:f(·)为匹配随机共振系统增益,则弱信号检测问题变为判断(22)式的2个假设哪个成立,要选取一个检验统计量函数T(x)来与相应的门限进行比较,判断是否存在待检测的微弱信号,其中检验门限由给定的虚警概率得到,在只有噪声输入随机共振系统时,根据指定的检测概率确定检验统计量的检测门限值。检测器结构框图如图4所示。

图4 随机共振检测器结构框图Fig.4 Structural diagram of matched stochastic resonance detector
建立检验统计量T(x),首先对匹配随机共振系统输出x(n)做快速傅里叶变换(FFT),设采样点数为N,有

(23)
然后取已知信号频点处的频谱幅度值为检验统计量,即
T(x)=Y(Nf0/fs),
(24)
式中:fs为系统采样频率。
最后通过比较检验统计量和检验门限值来判断目标信号的有无。
2.4 2阶双稳态匹配随机共振系统
设计2阶双稳态匹配随机共振检测系统,系统框图如图5所示。首先,用地震波传感器采集复杂海洋环境噪声,用第1节中的对数矩法估计列维分布的相关参数,然后数字信号处理器(DSP2812)利用估计的噪声参数和已知的目标信号频率,通过2.2节的匹配随机共振系统参数选取方法确定相应系统参数,建立2阶双稳态随机共振系统,检测复杂环境下的甚低频声信号。

图5 系统总体框图Fig.5 General system diagram
图6所示为系统总体框图中的匹配随机共振系统原理框图,主要由积分电路、反相电路、求立方电路和倍数可调的放大器组成。图5中的DSP2812通过控制图6中的数字电位器来调节放大器的电阻,进而调节运算放大器的增益,实现对随机共振系统参数的调节。

图6 匹配随机共振系统原理框图Fig.6 Schematic diagram of matching stochastic resonance system
3 实验验证
3.1 仿真实验验证
为了验证2阶双稳态匹配随机共振在列维噪声下检测信号的可行性,首先进行计算机仿真实验,微弱周期信号为正弦信号,其幅值为0.1,由于甚低频信号频段基本在100 Hz以内,因此输入信号频率f0选用甚低频段内的20 Hz和80 Hz. 用Janicki-Weron算法产生α=1.5、β=0、σ=1、μ=0的列维噪声,其噪声强度为1. 采样频率fs=100f0,采样点数N=4 000,系统输出序列做10次平均。根据(21)式确定2阶双稳态匹配随机共振系统参数,分别对输入混合加噪信号和系统输出信号进行频谱分析。图7所示为输入加噪信号及频谱分析,图8所示为2阶双稳态匹配随机共振系统输出信号及频谱分析。

图7 不同输入信号频率输入加噪信号及频谱分析Fig.7 Input-plus-noise signal and spectral analysis atdifferent input signal frequencies

图8 不同输入信号频率下输出信号及频谱分析Fig.8 Output signal and spectral analysis at differentinput signal frequencies
通过对比图7和图8可以看出:在输入系统之前,弱周期信号已经完全被复杂的背景噪声所淹没;在经过2阶双稳态匹配随机共振系统之后,甚低频弱周期信号有明显的增强,并且高频信号被抑制,有利于进行下一步检测。
3.2 检测性能仿真

图9所示为不同虚警概率条件下两种检测器的检测概率- 信噪比曲线。取f0=80 Hz,N=4 000,根据3.1节的匹配参数选取方法,分别选取2阶双稳态匹配随机共振系统参数。图9中,Pf为虚警概率,Pd为检测概率。

图9 不同虚警概率下的检测曲线Fig.9 Detection curves of noise intensity and weak signal under different false alarm probabilities
从图9中可以看出:列维噪声背景下进行微弱信号检测时,在相同虚警概率情况下,相比于传统相关检测器,2阶匹配随机共振检测器可以有效地提高系统的检测性能;在虚警概率为0.01条件下,要使得检测概率达到0.9,2阶匹配随机共振检测器相比于相关检测器所需输入信噪比可以降低10 dB;特别是在输入信噪比为0 dB以下列维背景噪声情况下,传统相关检测器已无法进行有效检测,而2阶匹配随机共振检测器仍然有较高的检测性能。另外,通过对比图9中两种检测器检测曲线的斜率可以发现,当环境噪声强度或目标信号幅度在小范围变化时,本文2阶匹配随机共振检测器要比相关检测器平稳,对检测结果的影响相对较小。因此2阶匹配随机共振检测器可以在强列维背景噪声中检测甚低频弱周期信号。
3.3 湖中试验验证
为了验证2阶双稳态匹配随机共振系统在复杂海洋环境噪声下水下航行器甚低频声信号检测的有效性,在外场水域进行该系统的湖中试验。试验条件如下:下雨天湖北某水库,水域平均水深为30 m,水下航行器长5 m,航行速度3~5 kn,航行器入水深度为10 m;用甚低频传感器采集复杂环境下的低频环境噪声及航行器航行时产生的甚低频辐射噪声。
图10所示为采集到的降雨天气情况水下低频复杂环境噪声时域图及时频图。从图10(a)中可以发现有很多冲击噪声,从图10(b)可以看出很多时刻有很强的宽频干扰噪声,与模拟仿真产生的列维噪声较为一致,表明用更加符合实际情况的列维噪声来描述复杂环境下的海洋低频环境噪声是合理的。
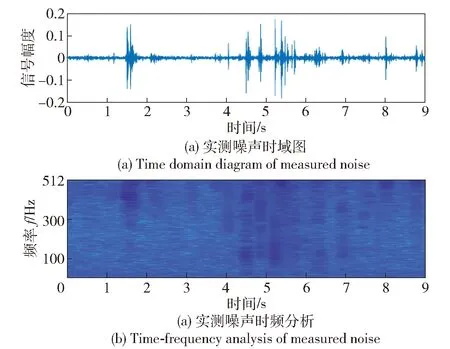
图10 实测复杂水下环境噪声Fig.10 Measured noise in complex underwater environment
用第2节建立的2阶双稳态匹配随机共振系统进行实测数据分析,时频图中的频率分辨率为2 Hz,强度信息为信号的能量谱密度。图11所示为实测带噪甚低频信号及时频分析图,可见100 Hz以内的低频信号都被淹没在强背景噪声中,无明显的甚低频信号线谱。图12所示为经过2阶双稳态匹配随机共振系统的输出信号及时频分析图。由图12(a)可见:输出信号中环境噪声的时变冲击噪声部分都得到了有效抑制,并且弱周期甚低频信号得到了有效增强,输出信号时域图中信号有偏移,可能是双稳态随机共振检测系统产生的固定偏移,需要在后续进一步改进硬件系统,但系统输出已明显产生共振现象。由图12(b)可以看到:高频部分的环境噪声强度明显变弱且具有非常明显的甚低频线谱,与该型号水下航行器80 Hz附近甚低频固定线谱一致。由于在航行器移动过程中传感系统位置固定不变,目标信号会产生小范围幅度起伏。另外,航行器移动也会产生多普勒频移,但是系统时频分析结果还是能看到连续明显的线谱,因此目标移动产生的小范围信号幅度起伏和频率偏移对系统检测性能的影响较小。本次湖中试验验证了用2阶双稳态随机共振系统进行复杂海洋环境噪声下水下航行器甚低频辐射信号检测的有效性。
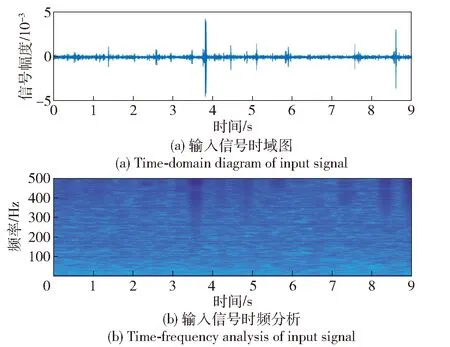
图11 实测带噪甚低频信号及时频分析Fig.11 Time-frequency analysis of measured VLF signals with noise

图12 系统输出信号及时频分析Fig.12 System output signal and time-frequency analysis
4 结论
针对在复杂海洋环境噪声下潜艇探测问题,本文采用列维分布来描述复杂海洋低频环境噪声并估计实测噪声的列维分布参数;提出随机共振来检测复杂海洋环境噪声下甚低频信号,推导列维噪声下随机共振系统的匹配参数,建立了2阶双稳态匹配随机共振信号检测系统;最后进行了计算机仿真实验和外场湖中试验。研究结果表明:2阶双稳态匹配随机共振系统可以增强甚低频弱周期信号;2阶匹配随机共振检测器可以有效地提高系统的检测性能,在虚警概率为0.01条件下,要使得检测概率达到0.9,2阶匹配随机共振检测器相比于相关检测器所需输入信噪比可以降低10 dB.
本文完成了所提方法的理论仿真及试验验证,但仍有不足之处,包括没有对未知水下目标进行研究以及没有进行海上试验验证。下一步计划进行未知目标的探测研究并进行相关海上试验,为复杂海洋环境噪声下敌方潜艇的远程探测提供技术基础。
猜你喜欢
测控技术(2022年4期)2022-04-27
金桥(2022年1期)2022-02-12
雷达科学与技术(2021年5期)2021-11-29
皮革制作与环保科技(2021年5期)2021-11-27
西安电子科技大学学报(2021年2期)2021-04-30
意林(绘英语)(2018年2期)2018-11-29
当代陕西(2018年12期)2018-08-04
科技风(2018年15期)2018-05-14
人大建设(2017年6期)2017-09-26
科学与财富(2017年2期)2017-03-15
