
悬浮式深水炸弹综合防御鱼雷作战仿真系统确认方法
2020-02-06 00:37孙慧玲胡伟文宋业新张磊潇刘彩霞
兵工学报 2020年12期
孙慧玲, 胡伟文, 宋业新, 张磊潇, 刘彩霞
(1.海军工程大学 基础部, 湖北 武汉 430033; 2.海军工程大学 兵器工程学院, 湖北 武汉 430033;3.92730部队, 海南 三亚 572000;4.空军预警学院 基础部, 湖北 武汉 430019)
0 引言
目前,利用悬浮式深水炸弹(简称深弹)拦截鱼雷是水面舰艇防御鱼雷来袭的作战方式之一,该作战方式可以有效弥补声纳告警信息不精准的缺陷,对鱼雷直接起爆杀伤。对该作战方式的研究可有效提升水面舰艇的水下防护能力,将防御鱼雷作战从被动转化为主动,从而满足舰艇装备性能发展的需求。作战数字仿真结合实际技术战术参数、利用计算机虚拟构造仿真战场环境,可以最大程度地模拟作战态势。利用仿真优势预测将来的战略、战术发展趋势,可使研究工作更加生动凸显现代战争的特点和规律,为实训和实战提供更加科学的方法[1-3]。仿真确认问题是仿真研究中的决策问题[4-7],为降低主观因素影响,需要在相关依据的基础上,围绕建模与仿真(M&S)开发周期制定确认需求、确认计划并执行确认计划,做出可接受性评估,最后得出结论。对作战仿真系统的确认一般是交由用户方确认或者委托第三方进行专家评审确认。确认结果建立在客观依据的基础上,针对特定目的对建模仿真的可信性进行准确、客观的评价或验收,可以为所研制的仿真系统是否可被用户方接受提供参考。
截止目前,深弹拦截鱼雷作战方法及战术应用已取得了一定的成果。文献[8]介绍了悬浮式拦截弹作战仿真平台的主要功能、总体设计和实现方法,运用多线程技术解决了数据收发与操作的同步问题,为悬浮式拦截弹的作战使用研究提供了重要的辅助手段。文献[9]利用模糊数学知识将鱼雷报警距离分为近、中、远3个模糊区域,给出了鱼雷报警距离隶属函数关系,建立了悬浮式深弹拦截不确定型鱼雷作战模型,并对作战模型进行了计算机仿真。文献[1]详细介绍了悬浮式深弹拦截鱼雷的作战方法。文献[2]针对悬浮式深弹武器系统对鱼雷拦截能力的考核要求,提出武器实际发射与模拟发射相结合的试验模式,给出具体的试验方案,成功解决了试验子样数不足、武器弹药不充分的难题。文献[3]提出了同时使用深弹、声干扰协同防御线导鱼雷的作战样式,建立了协同对抗线导鱼雷的数学模型,并进行了Monte Carlo仿真验证。文献[5-7,10]利用所开发的悬浮式深弹拦截鱼雷作战数字仿真系统进行模拟仿真,对拦截概率受主要技术战术指标的影响规律进行了量化分析,并对该系统进行了模型校核与程序验证,但对真实防御过程的可信性尚未进行过确认,应用效果尚待检验。
为解决悬浮式深弹综合防御鱼雷作战仿真评估确认问题,本文基于仿真作战的历程建立舰艇生存概率的数学模型,针对生存概率样本的高维、海量等特性,提出将多重假设检验应用于作战仿真系统确认的思路,建立评估多重假设检验功效的模型以及计算生存概率样本p-值的模型,根据模型求解得到该仿真系统的各项重要评估指标值,采用多重假设检验方法对系统的仿真作战输出样本进行检验,对其模拟作战过程的可信性进行确认。
1 仿真系统参数设定及生存概率计算模型
1.1 仿真系统参数设定
为充分展现出深弹布设数量与拦截概率的变化规律,本文仿真条件参数设定如下:每次试验深弹数量增加6发,将深弹布设总量的取值范围从6发取到48发,即布设深弹的组数N分别取1~8,置信水平为0.95. 表1所示为舰艇拦截概率及置信区间。根据表1可知,深弹发射组数为2组或者4组时拦截概率的点估计值最大,因此舰艇的生存概率较高,在以后的仿真试验中,取深弹发射组数为2组比较合适。
仿真参数主要包括环境因素、舰艇平台、深弹系统、作战目标等参数,假设鱼雷制导方式为主动声自导,海况2~3级、海深100~150 m、实验条件为中等水文条件,其他参数想定值分别为:舰艇航速v=18 kn,最大航速vmax=30 kn,旋回角速度ω=1.7°/s,最大加速度a=0.2 m/s2;鱼雷设定航速vT=45 kn,最大航程L=20 km,鱼雷旋回角速度ωT=6°/s;深弹毁伤半径r=26 m.
仿真参数取值如表2所示,以舰艇右舷鱼雷报警为例,舰艇对鱼雷的报警范围为右舷30°~150°、距离3 000~6 000 m的扇形区域。其中报警距离d的历程为3 000~6 000 m,报警舷角θ的历程为30°~150°,选择距离步长100 m、舷角步长5°来分割报警区域,将扇形区域离散成31×25=775个点位。在每个点位单独运行仿真系统若干次,根据生存概率计算模型即可得到舰艇的生存概率值。

表2 仿真参数取值
1.2 生存概率计算模型
拦截概率[5]是指在来袭鱼雷预计航路上布设一定数量深弹形成深弹阵时,鱼雷进入深弹阵有效毁伤范围内的概率。若仅考虑用深弹拦截的方式防御鱼雷作战,则某位置拦截概率估计值越低,表明该位置越不容易防守来袭鱼雷,其防御的重要性程度越高。舰艇机动规避鱼雷成功的概率是指根据不同战场态势,舰艇通过机动规避的方式躲避来袭鱼雷,从而顺利逃脱鱼雷袭击的概率;生存概率是指舰艇根据不同战场态势,同时预备采取布设深弹拦截、机动规避或者其他防御手段,使舰艇成功避免鱼雷攻击的概率[11-15]。
假设当鱼雷来袭时,舰艇采用深弹拦截鱼雷防御方式成功拦截的概率为P1,采用纯机动规避防御方式规避成功的概率为P2,从而舰艇防御鱼雷作战的生存概率P可表示为
P=1-(1-P1)(1-P2).
(1)
利用数字仿真系统进行n次仿真实验,其中,深弹拦截鱼雷成功的次数为n1,舰艇机动规避成功的次数为n2,根据大数定律,深弹拦截鱼雷成功的概率估计值1为
(2)
(3)
(2)式、(3)式代入(1)式,可得舰艇生存概率的估计值为
(4)
2 仿真系统确认方法
2.1 问题分析
仿真系统在交付使用之前,开发方需要在用户手册列表中汇总出报警区域内位置Mi(θi,di)处舰艇的生存概率值qi及误差εi,i为每个具体点位的标号。用户方可使用该仿真系统进行数字模拟仿真实验,在指定位置Mi(θi,di)处得到n个生存概率的观察值qi1,qi2,…,qin,在给定显著性水平α下,利用假设检验可以判断该位置的实际生存概率i是否满足用户方标准i∈[qi(1-εi),qi(1+εi)];若满足,则接受该点位的概率估计值。
实际应用中,由于现场试验数据不充足,确认标准中的区间左、右端点值需用小样本参数估计获得并反馈给仿真系统开发方。为了使确认结论更精确,通常距离和舷角的步长取得更小一些,对应得到的拦截成功概率和规避成功概率就是海量数据集合;根据这些数据来推断仿真系统的效能,则是高维推断问题。针对此问题,传统单个假设检验方法可能因一些不准确的检验结论造成确认失准[16-18]。因此,本文拟采用多重假设检验法对仿真系统进行确认。
多重假设检验是一个假设检验族,该检验族有n个假设,分别记为H1,H2,…,Hn. 假设n0为真实原假设的个数,n-n0即为原假设为假的个数,拒绝原假设的个数为R,根据是否接受原假设或备择假设的情况,可将多重假设检数目分类如表3所示。表3中:U为H0为真、接受H0的数目,H0为零假设,V、T分别表示犯第1类、第2类错误的假设检验数目;S为H0为假、拒绝H0的数目,n为已知量;
R为可观测的随机变量;U、V、T、S均不可观测,V可用建模计算获取;n0不可观测,可以通过建模计算手段获取。
类似单个检验,多重假设检验同样需要选择一种检验标准,使得犯第1类错误的概率控制在合适范围内,且可以度量“弃真”的概率,同时希望功效(R-V)/(n-n0)尽可能大[16-21]。传统的多重假设检验方法是控制总错误率(FWER),但这种方法会导致整个多重检验的功效很低[21-23]。Benjamini等[17]提出了假发现错误率(FDR)这种新的测度,即多重检验中被错误拒绝的检验个数占被拒绝检验总数的比例。目前FDR已经作为处理基因阵列假阳性指标问题的一个常用方法。但是,该方法估计出的真实原假设数目过大,在作战仿真系统确认方面略显宽松。本文基于对实训、实战风险的考虑,结合Benjamini等的理论,给出计算仿真系统生存概率p-值的p-value模型和基于控制FDR假设检验的Power模型,根据控制的检验方法可知,应用该方法做检验最关键的一步是需计算出各单个假设检验的p-值。
2.2 p-value模型
仍以舰艇右舷鱼雷报警为例,由于生存概率的影响因素众多,很难将生存概率准确表示成该鱼雷报警舷角、距离的函数表达式,但是可以判断它与鱼雷报警舷角、报警距离相关性很大,可以表示成k(d,θ),其中d的历程为3 000~6 000 m,θ的历程为舰艇右舷30°~150°,选择距离100 m、舷角5°为步长分割报警区域,将扇形区域离散成31×25=775个点位。潜艇和鱼雷相关参数取值为表2的数据,按下列模型计算单个假设检验的p-值。
步骤1选择点位M1(θ1,d1),设定悬浮式深弹拦截鱼雷作战数字仿真系统运行次数为20,得到生存概率q1;再将系统运行20次,得到生存概率q2,…,做第50次实验,得到生存概率q50.

步骤3点位M2(θ2,d2),…,Mn(θn,dn)分别重复步骤1和步骤2,可得第2次~第n次假设检验的p-值为p2,p3,…,pn.
2.3 Power模型
定义FDR如下:
(5)
根据定义,FDR表示犯第1类错误的个数V与拒绝原假设数目R的比值的期望,有以下定理成立。
定理1若假设检验族中各原假设相互独立,则不论错误原假设的结构为何种形式,Benjamini-Hochberg检验可以某种形式的水平α控制FDR,控制范围为
(6)
基于控制FDR的Power模型如下:
步骤1根据n个假设检验H1,H2,…,Hn计算对应的p-值p1,p2,…,pn.
步骤2将p-值p1,p2,…,pn从小到大排列,得到顺序p-值p(1),p(2),…,p(n),它们对应的检验分别为H(1),H(2),…,H(n)。
步骤3从j=1开始,取α=0.05,令
(7)
步骤4若满足条件的s存在,则拒绝H(1),H(2),…,H(s)对应的原假设;若满足条件的s不存在,则不拒绝任何原假设。拒绝的原假设个数s即为表3中R的数目。
步骤5估计真实原假设n0,可得
(8)
式中:λ为参数,取值范围为(0,1);#表示满足括号中条件的变量个数;W(λ)=[#(p(j)>λ)]为p(j)>λ的个数取整。

步骤6根据0估计值,重复步骤1~步骤4的检验,令
(9)
若满足条件的m存在,则拒绝H(1),H(2),…,H(m)对应的原假设;若满足条件的m不存在,则不拒绝任何原假设。拒绝的原假设个数m即为表3中V的数目。
步骤7计算假设检验的功效
(10)
Power模型示意图如图1所示。
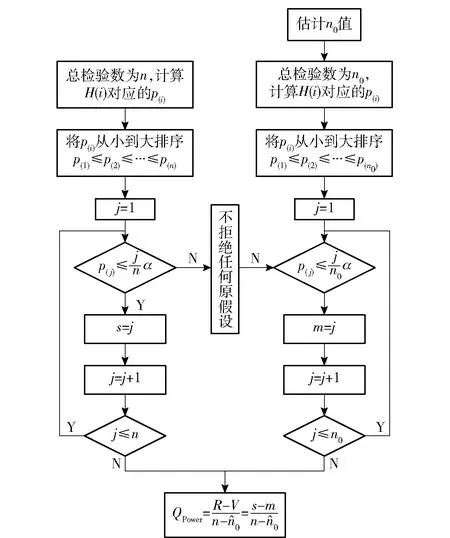
图1 Power模型示意图Fig.1 Sketch map of Power model
3 基于生存概率的仿真系统确认
3.1 各点位对应的p-值
不失一般性,仍将报警区域离散成31×25=775个点位,舰艇和鱼雷相关参数取值为表2的数据,775个点位分别单独运行10 000次,利用生存概率的计算模型计算得到775个生存概率,选取部分生存概率值如表4所示。

表4 报警舷角、距离对应的生存概率部分值
由于数据量较大,下面给出775个生存概率的几何图形直观表现形式,报警舷角和报警距离对生存概率影响的曲线图如图2所示,对应的等高线图如图3所示。
利用2.2节中步骤1~步骤3,可得各点位M1(θ1,d1),M2(θ2,d2),…,Mn(θn,dn)的p-值p1,p2,…,pn,如表5所示。
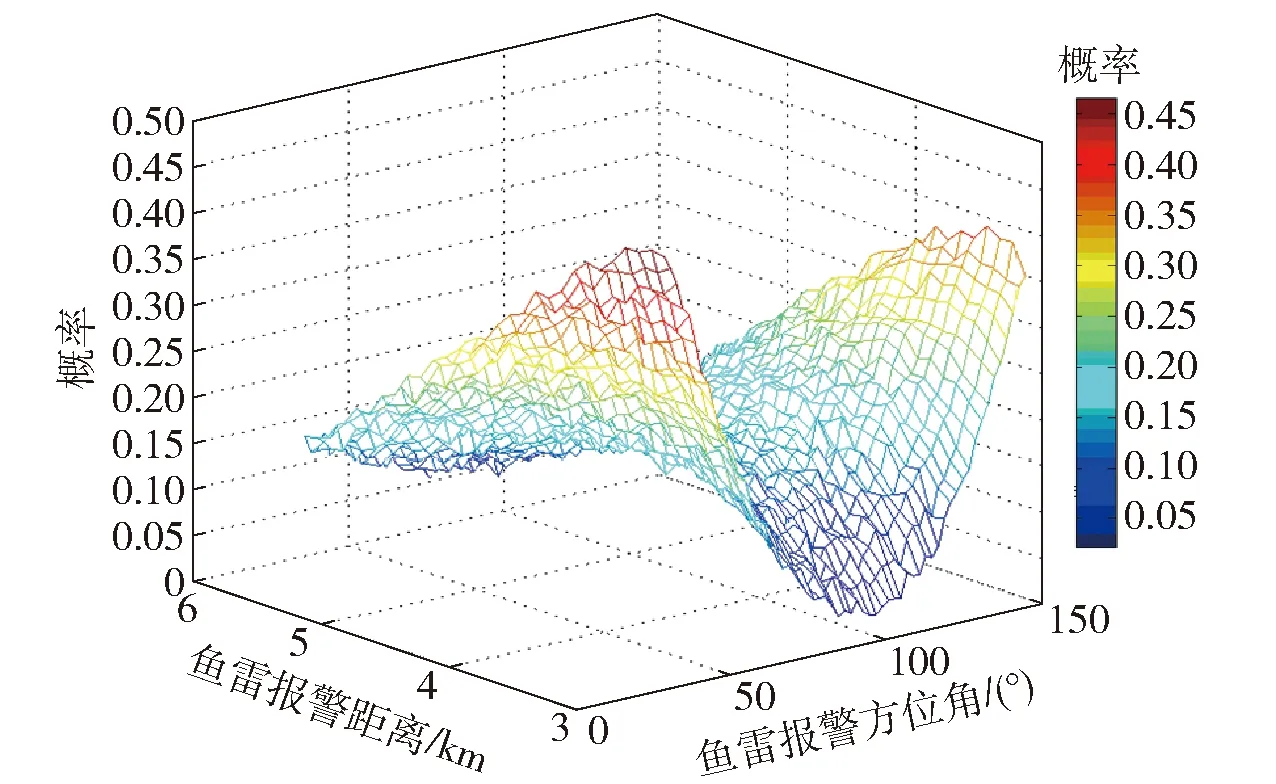
图2 生存概率的影响曲线图Fig.2 Effects of alerting relative bearing/alerting distance on survival probability
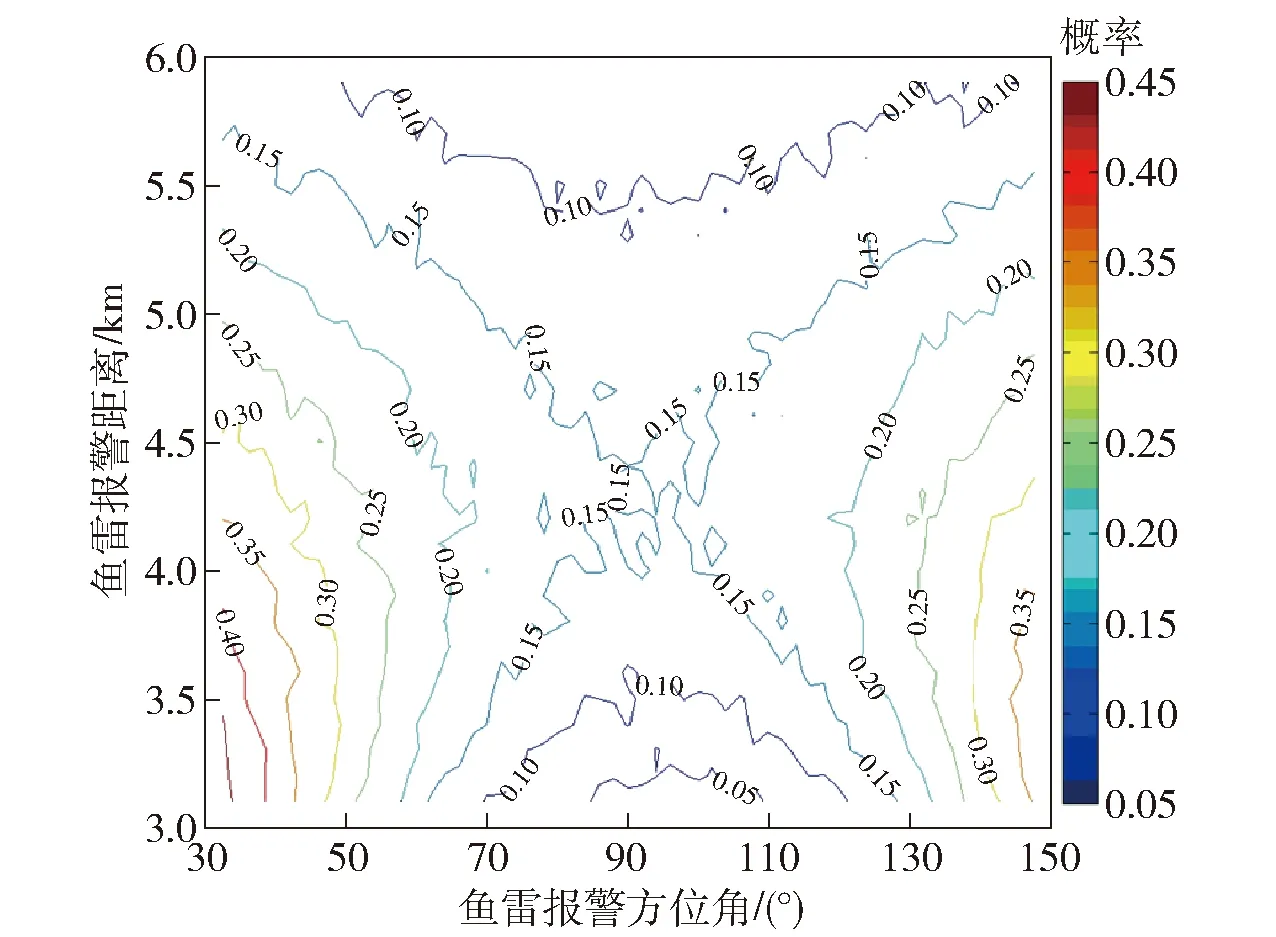
图3 舰艇生存概率的等高线图Fig.3 Contour map of survival probability

表5 报警方位角/距离对应的部分p-值
3.2 n0的估计值

3.3 多重假设检验结果
根据检验步骤,计算得到仿真系统进行多重假设检验之后的关键指标数值如表6所示。从控制错误的角度,将多重假设检验与单个假设检验进行对比,结果如表7所示。
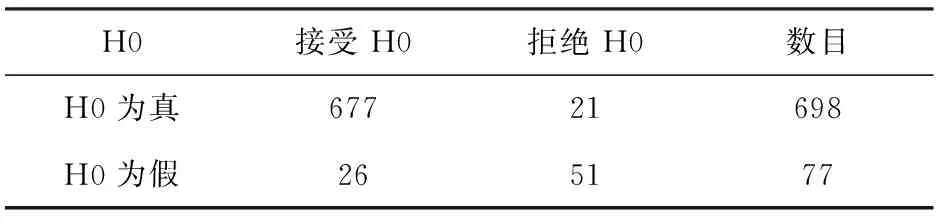
表6 多重假设检验结果数值

表7 数值对比
从数值上看,取α=0.05,根据2.3节步骤1~步骤4及(7)式可得拒绝原假设个数s=72,即表3中拒绝原假设的个数s=72;根据2.3节步骤5和步骤6得0=698,结合(9)式可得拒绝真实原假设个数m=21,即表3中V=21,根据(10)式可计算出假设检验的功效QPower=66.2%. 从统计学角度看,检验功效达到65%以上,检验方法是合理的[19-26],表明该方法可以应用于需要验证的作战仿真系统。
4 结论
本文将多重假设检验应用于悬浮式深弹拦截鱼雷作战数字仿真系统,利用系统的输出样本计算生存概率,建立p-value模型,针对不同的点位计算生存概率对应的p-值,根据Power模型对输出p-值进行多重假设检验。检验方法可以得到悬浮式深弹综合防御鱼雷仿真系统确认的各项重要评估指标值,进而对模拟作战过程的可信性进行确认。传统假设检验可得系统认可度为η=(接受原假设的数目)/假设检验的数目,计算得η=90.7%,多重假设检验计算η=87.3%. 显然,多重假设检验对系统的确认更严格一些,符合对武器装备仿真确认的实际要求。另外,传统假设检验计算可得犯第1类错误的概率为9.3%,多重检验模型可计算犯第1类错误的概率为3.0%,在武器系统的仿真确认中,不管是第1类错误还是第2类错误都可能导致比较严重的后果,多重假设检验在控制第1类错误方面明显优于单个假设检验,并且该方法可以对检验的第2类错误给出度量。
猜你喜欢
中国新通信(2021年11期)2021-08-16
汽车观察(2021年4期)2021-05-10
少儿科技(2021年4期)2021-01-11
现代职业教育·高职高专(2020年1期)2020-08-16
指挥控制与仿真(2020年3期)2020-06-08
兵器知识(2020年2期)2020-03-20
工业设计(2019年9期)2019-11-04
文萃报·周二版(2019年46期)2019-09-10
时代金融(2017年6期)2017-03-25
军事文摘(2016年8期)2016-08-11
