
基于MEA的磁流变神经网络逆模型的研究
2020-02-07 13:38童仲志侯远龙
机械设计与制造工程 2020年1期
王 明,童仲志,侯远龙,胡 达
(南京理工大学机械工程学院,江苏 南京 210094)
磁流变(magnetorheological,MR)阻尼器作为一种可调阻尼元件,因其性能优良现已被广泛地应用于半主动悬架减振研究中[1]。然而在实际的应用过程中,MR阻尼器在磁场作用下表现出强烈的非线性特性以及滞环现象。针对上述情况,国内外学者对其力学模型进行了大量的研究,目前常用的模型主要有Bingham模型[2]、Bouc-Wen数学模型[3]、现象模型[4]、变换现象模型[5]等。其中变换现象模型是通过调整现象模型的结构,同时引入Ismail提出的“归一化”概念得到的[6]。相较于现象模型,变化现象模型减少了模型的参数冗余和参数数量,输出阻尼力刻画精度得到了一定程度提高。
MR阻尼器力学模型能够反映阻尼力与活塞相对位移、相对速度以及电流之间的关系,属于正向模型。但在实际的控制过程中,往往是通过期望的阻尼力和活塞的相对位移来预测控制电流,因此逆模型的精度对实际的控制效果将产生直接影响。文献[7]根据多项式模型推导出磁流变阻尼器的逆模型,并研究了半主动悬架系统的开环控制策略。但多项式模型并不能对其他电流或电压的力学特性进行很好的预测。文献[8]采用遗传算法优化的BP(back propagation,反向传播)神经网络建立了MR阻尼器的逆向模型,并将所建立的逆模型应用于1/4车半主动悬挂系统中进行仿真,仿真结果表明,所建立的逆模型可以较好地预测控制电流,但遗传算法的搜索速度慢,要得到较精确的解需要更多的训练时间。文献[9]建立了基于广义回归神经网络(GRNN)的磁流变正、逆模型,通过仿真试验可知,GRNN模型能准确预测MR阻尼器的阻尼力和控制电流,但模型仅对一些固定频率下的电流信号进行了检验,对在其他电流下的适用性仍有待研究。
因此,笔者将针对MR阻尼器逆向模型建模精度不高这一问题,建立基于BP神经网络的MR阻尼器逆向模型,同时就BP神经网络中存在的局部极小问题,采用思维进化算法(mind evolutionary algorithm,MEA)优化BP神经网络的初始权值和阈值。
1 MR阻尼器正向模型和力学特性
目前,描述MR阻尼器力学特性的模型较多,经研究比较,本文选择基于现象模型的变换现象模型作为MR阻尼器正向模型。模型结构如图1所示,由磁滞元件、阻尼元件和弹性元件所构成。模型表达式[10]如下:
(1)
(2)
(3)
(4)
c1=64I+48.4
(5)
α=-305.1I2+1 277I+43.9
(6)


图1 变换现象模型结构图

表1 变换现象模型参数
根据式(1)~(6)在Simulink中建立MR阻尼器的变换现象模型,施加幅值为15 mm、频率为0.5 Hz的正弦位移激励,电流大小为0~2 A,分析该模型的力学特性,仿真结果如图2所示。
从图2(a)可以看出,磁流变阻尼力随着电流的增大逐渐增大,当电流达到2 A时,阻尼力呈现出“饱和”状态。从图2(b)和(c)可以看出,在低速时,阻尼器呈现出滞回现象,且随着速度的增大,阻尼力也逐渐增大,当速度大于一定值时,阻尼力表现出“屈服”现象。由此可知,变换现象模型可以很好地反映MR阻尼器的非线性磁滞特性,模型精度较高,有利于逆向神经网络模型的建立以及半主动悬架系统的仿真分析。

图2 变换现象模型力学特性曲线
2 MR阻尼器逆向神经网络模型
2.1 模型训练和数据验证
BP神经网络作为一种多层前馈神经网络,对非线性函数具有较强的映射能力。构建神经网络之前,应首先获得足够多的训练样本和测试数据。考虑到MR阻尼器的实际工作情况,本文选择频率为0~5 Hz、幅值为±20 mm的高斯白噪声作为位移信号;电流信号取3组,分别为频率0~10 Hz、幅值0~2 A的高斯白噪声,固定电流0 A 以及固定电流2 A,这样可以保证训练数据能够覆盖MR阻尼器的工作范围。输入输出数据由变换现象模型产生,设置采样频率为100 Hz、采样时间为100 s,可以得到10 000组数据,其中前7 000组数据用来训练神经网络,后3 000组数据作为测试数据。
2.2 神经网络建模
由于MR阻尼器输出电流受当前和过去时刻活塞位移s、速度v、阻尼力F以及过去时刻电流i的影响,因此本文选11个输入层节点,分别为当前时刻的s(t)、v(t)、F(t),前一步长的s(t-1)、v(t-1)、F(t-1)、i(t-1),前两个步长的s(t-2)、v(t-2)、F(t-2)、i(t-2),其中速度信号可由位移信号求导取得。输出层只有一个节点,即当前时刻的电流i(t)。根据Kolrnogorov定理的描述[11],单隐含层的BP网络在一个封闭区间内完全可以使那些连续的函数逼近,因此本文定义隐含层数为1。
隐含层节点的个数l一般采用经验公式(7)进行设计。
(7)
式中:a为1~10的常数;m1,n1分别为输入、输出层节点个数。
已知m1=11,n1=1,根据经验公式可算得l的取值范围为5~14,本文取隐含层节点个数为14。建立的神经网络结构图如图3所示。
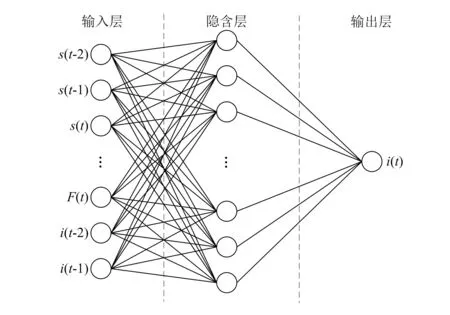
图3 神经网络结构图
2.3 神经网络优化
鉴于BP神经网络存在收敛速度慢、易陷入局部极小值等问题,本文采用思维进化算法(MEA)对神经网络的初始权值和阈值进行优化。
MEA继承了遗传算法(GA)中“群体”和“进化”的思想,同时在算法中引入“趋同”和“异化”操作,相较于GA,MEA可以记忆不止一代的进化信息,同时由于其结构上固有的并行性,避免了GA中存在的训练时间长、早熟等问题[12]。
利用MEA优化BP神经网络的设计步骤如下:
1) 构建11-14-1的神经网络,选择tansig作为隐含层传递函数,purelin作为输出层传递函数,通过MR阻尼器正模型产生训练样本和测试数据。在对模型进行训练前应对输入输出数据进行归一化处理,通过MATLAB中mapminmax()函数实现归一化。
2) 产生初始种群,并根据一些优胜个体构建优胜子种群和临时子种群。其中每一个子种群的个体都以优胜者为中心服从正态分布。
3) 趋同、异化操作。在优胜和临时子种群内部进行趋同操作,直到各子群体达到成熟。记录各子群体的得分,若存在得分高于优胜子群体的临时子群体,则执行异化操作。
4) 当满足迭代停止条件,解析出最优个体,并把最优个体的值赋给BP神经网络作为初始权值和阈值,进行网络训练和测试。
MEA的得分函数F定义为:
(8)
式中:w为训练数据输出点个数;ti为神经网络实际输出值;pi为理想输出值。
设置种群规模为200,优胜、临时子种群的个数都为5,迭代次数为100。整个优化过程如图4所示。

图4 MEA优化神经网络模型流程图
2.4 泛化性检验
使用3组测试数据分别对优化后的BP神经网络以及普通的BP神经网络进行泛化性检验,仿真结果如图5、图6所示。

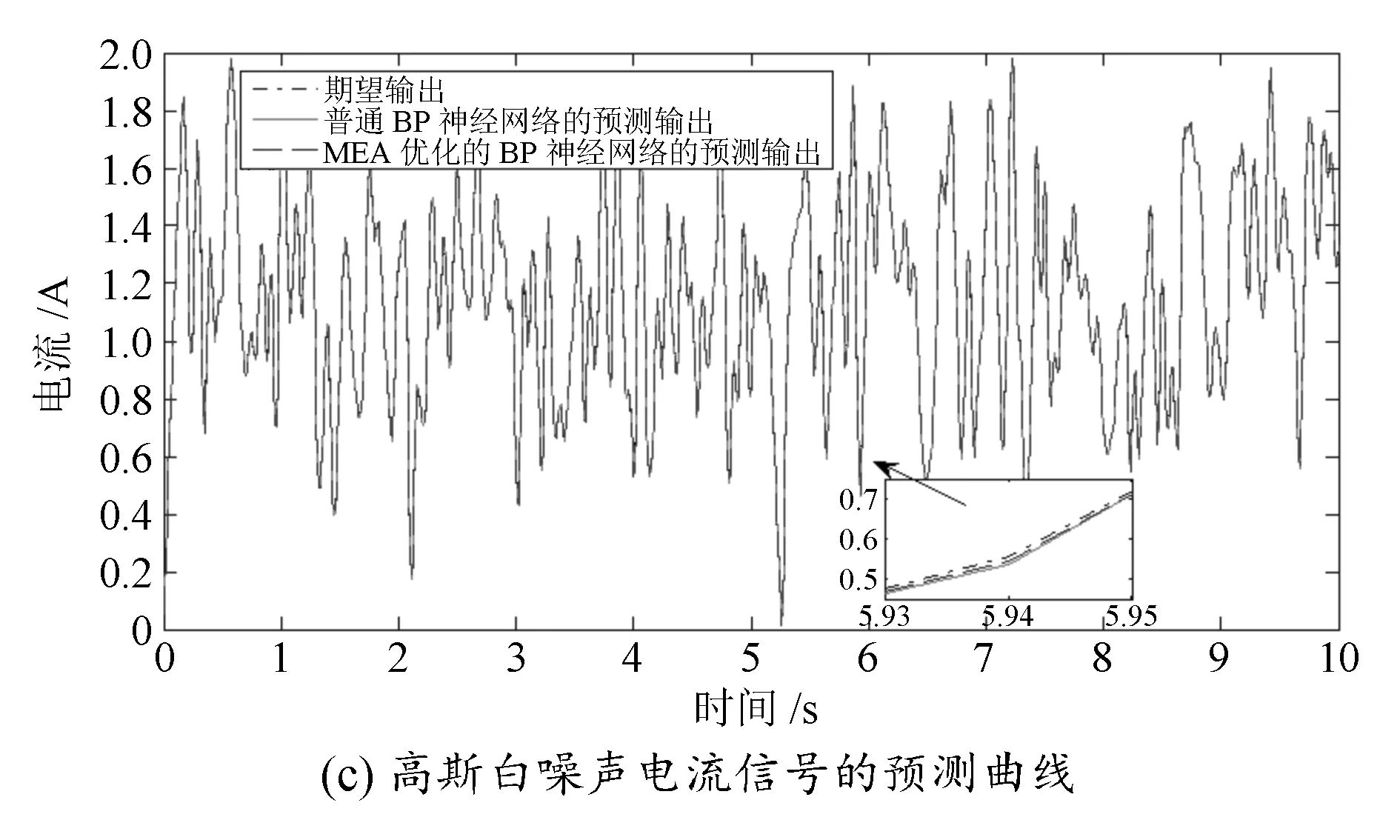
图5 电流的预测曲线
分析图5、图6可知,对于高斯白噪声的电流信号,传统BP网络对电流的最大预测误差为0.020 A,而经优化后的BP网络,误差减小到0.013 A。对于固定电流0 A和2 A,优化后的BP网络使最大预测误差分别减小了0.005 A和0.006 A。由此可知,本文提出的MEA-BP神经网络逆模型提高了控制电流的预测精度,泛化程度较高。
3 半主动控制仿真
为了进一步验证本文提出的MEA-BP神经网络逆模型的有效性,将其引入到1/4车半主动悬架系统中进行仿真分析。1/4车半主动悬架模型如图7所示。

图6 电流的预测误差曲线
由图7可列出系统的运动微分方程:
(9)
(10)
式中:mb为簧载质量;mw为非簧载质量;ks为悬架弹簧刚度;kt为轮胎刚度;Fd为可调阻尼力;xw为非簧载质量的位移;xb为簧载质量的位移;xr为路面激励位移。
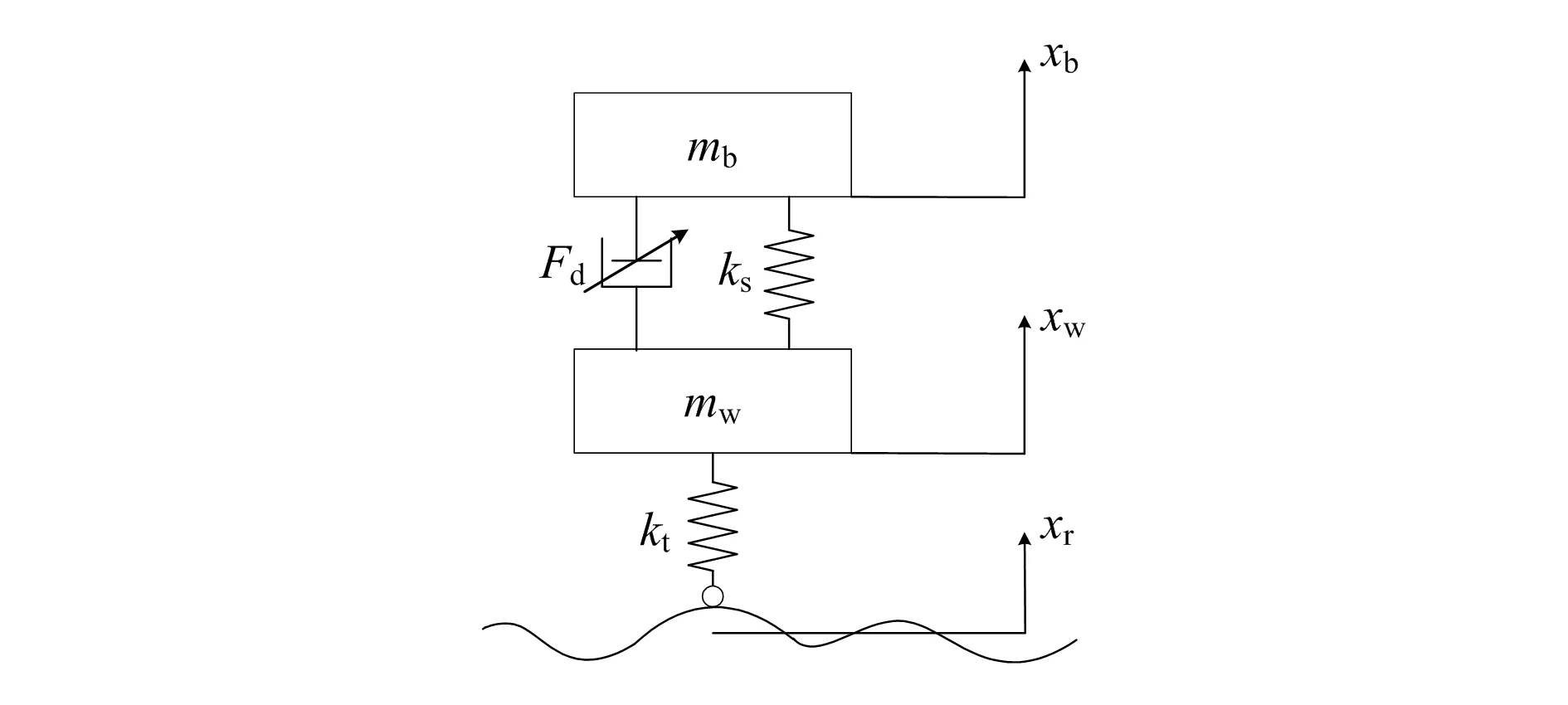
图7 1/4车半主动悬架模型
天棚、地棚控制作为半主动悬架经典的控制策略,具有实现方法简单、所需状态量少、易测量等优点。其中,天棚阻尼控制可以改善车辆的平顺性,而地棚阻尼控制解决了悬架的稳定性问题。因此,鉴于天棚、地棚控制的优点,本文选择混合控制作为半主动悬架的控制策略。混合控制满足如下的控制规律:
(11)
(12)
(13)

(14)
在Simulink中建立半主动悬架模型,混合控制器模型以及MR阻尼器正、逆向模型。逆向模型可由gensim(net,-1)指令生成,路面激励采用滤波白噪声的方法产生。系统中各参数值[13]设置如下:mb=1 500 kg,mw=100 kg,ks=129 000 N/m,kt=1 290 000 N/m,csky=13 910.43 N·s/m,cp=10 000 N·s/m,Cgrd=11 357.82 N·s/m,α1=0.8,C级路面,v=60 km/h。其中cp为被动悬架的阻尼系数,ccky,cgrd由经验公式(15)计算可得。
(15)
式中:m,k分别为簧载质量mb、悬架刚度ks或非簧载质量mw、轮胎刚度kt,代入后可获得csky和cgrd。
以半主动控制中期望阻尼力与实际阻尼力的拟合情况以及实际的控制效果为目的进行仿真分析,仿真结果如图8、图9所示。
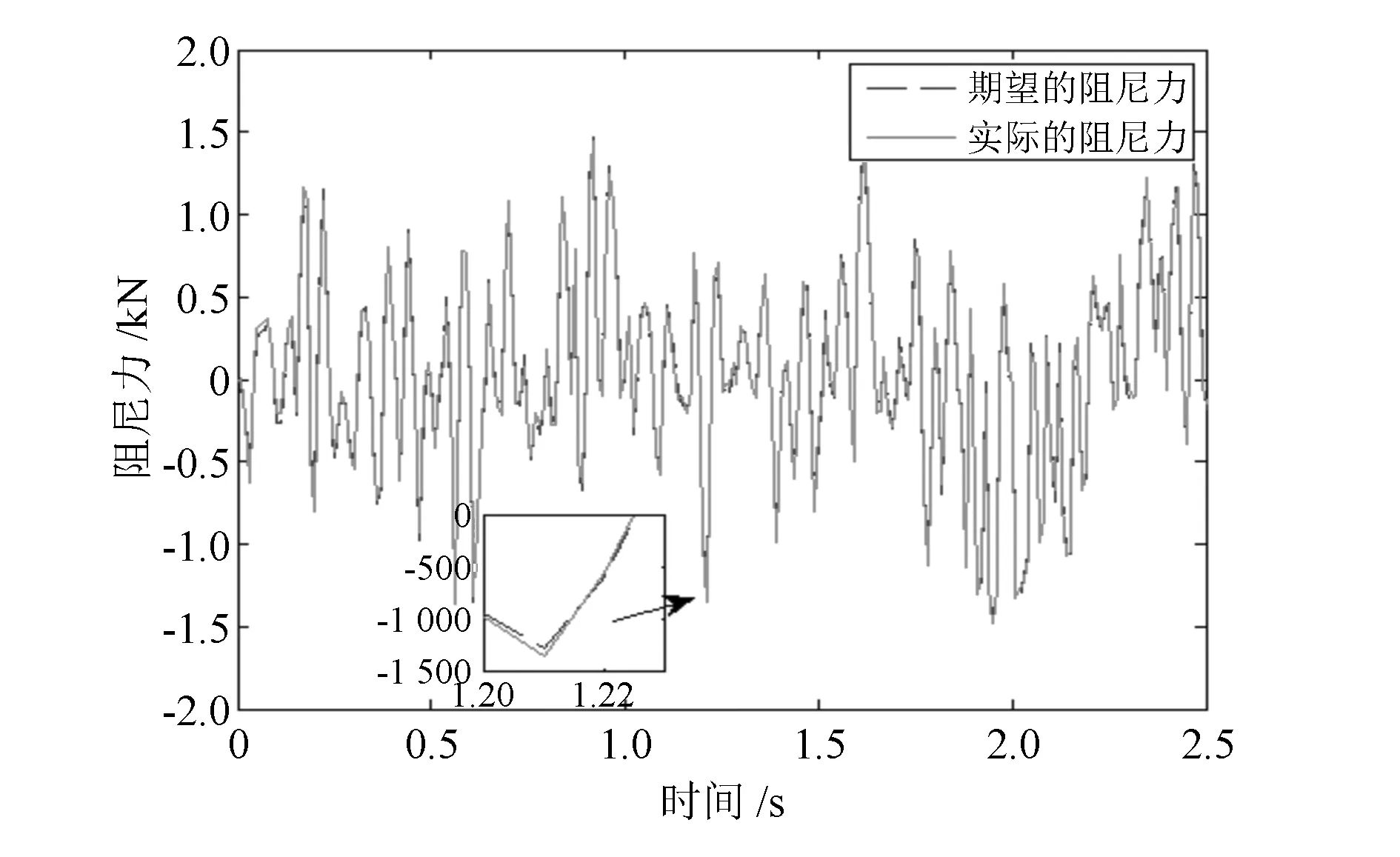
图8 半主动控制系统实际阻尼力与期望阻尼力的对比

图9 被动控制与半主动控制簧载质量加速度的对比
由图8、图9可以看出,作用于半主动悬架系统的实际阻尼力可以很好地跟踪期望的阻尼力,相较于被动控制,半主动控制减振效果明显。仿真结果说明了本文所建立的MEA-BP神经网络逆模型的有效性,可以实现所设计的控制策略。
4 结束语
本文利用BP神经网络建立了MR阻尼器逆向模型,针对BP网络存在局部极小化问题,采用MEA优化神经网络的初始权值和阈值,并将优化后的神经网络应用于1/4车半主动悬架系统中进行仿真分析。通过仿真结果可以看出,优化后的神经网络逆模型可以显著提高电流的预测精度,泛化程度较好,能够满足实际控制系统的要求,为MR阻尼器的准确建模与半主动控制提供了一种思路。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
施工技术(中英文)(2022年9期)2022-06-21
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
装备制造技术(2020年11期)2021-01-26
北京理工大学学报(2020年11期)2020-12-15
汽车工程学报(2015年6期)2016-03-23
太原理工大学学报(2015年3期)2015-12-17
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
噪声与振动控制(2015年4期)2015-01-01
