
基于LSTBSVM与蝙蝠算法的桥式起重机主梁的轻量化研究
2020-02-07 13:39李玉虎王宗彦刘岩松
机械设计与制造工程 2020年1期
李玉虎,王宗彦,刘岩松
(1.中北大学机械工程学院,山西 太原 030051)(2.山西省起重机数字化设计工程技术研究中心,山西 太原 030051)
在我国,大型工程的建设越来越多。起重机作为当前使用量最大的起重设备,在港口码头、大型工厂、建筑工地等地方都是不可或缺的。对于起重量大于5 t、跨度大于11 m的起重机,其主梁一般以箱梁为主,具有制造工艺简单、装配方便等优点,但箱梁存在自重大、主梁易变形等缺点,且主梁作为桥式起重机的主要承载结构,其质量占到起重机总质量的60%左右,因此对起重机主梁进行轻量化改进具有重要意义。
在国内,对起重机主梁的轻量化已经进行了大量的研究。文献[1]利用ANSYS软件和非主导排序遗传算法,对桥式起重机结构系统的动力特性进行了多目标优化设计;文献[2]运用ANSYS软件对箱型主梁进行各种工况的受力分析,找出了最危险的主梁截面,然后用导重的优化方法,对主梁进行轻量化设计;文献[3]基于相似理论和弹性力学的知识,用方程分析法推导了相似主梁与原型主梁重力场的相似准则,并对主梁进行了轻量化研究;文献[4]主要分析了主梁的结构,找出了主梁优化的最佳方案,降低了主梁的质量,并且满足使用要求;文献[5]以体积约束下的最小柔度为目标函数,研究了桥梁的周期拓扑优化问题;文献[6]主要对桥式起重机的主梁结构进行优化,首先选择设计参数,然后对桥式起重机的轻量化设计进行了研究。
箱型梁截面包含了多个参数,每个参数的变化对主梁整体的影响各不相同,如果同时考虑所有参数,就会使设计变得复杂,降低了设计效率。为了提高设计效率,灵敏度的引入就显得极其重要。灵敏度反映了设计参数对目标函数的影响程度,也就是说,灵敏度值越大,该参数对目标函数的影响程度就越大。通过选取灵敏度值较大的几个参数,将复杂问题简单化,可以大大简化设计过程,提高设计效率。
本文运用最小二乘法的孪生有界支持向量机(least squares twin bounded support vector machines,LSTBSVM)[7]对桥式起重机的箱型主梁设计参数进行灵敏度分析,依照分析结果,选取灵敏度值较大的设计参数,然后将蝙蝠算法引入到主梁的轻量化设计中,以主梁质量为目标函数,对各尺寸进行优化。针对蝙蝠算法收敛速度慢、精度低的问题,本文对蝙蝠算法的飞行方式进行了改进,然后再次对主梁尺寸进行优化,最后通过ANSYS进行有限元分析,验证本文优化设计的合理性。
1LSTBSVM

目标函数为:
(1)
(2)
式中:‖·‖表示L2范数;q1和q2为松弛向量;c1和c2为两个非负参数,分别为两个面的平衡因子;c3和c4为非负的参数;b1和b2为两个平面的偏差;w1和w2为两个平面的权向量。
设式(1)关于w1和w2的梯度等于0,得:
c3w1+AT(Aw1+e1b1)+c1BT(Bw1+e2b1+e2)=0
(3)
(4)
进而得出解:
(5)
(6)

算法描述:
1)定义H=[A,e1]∈Rm1×(n+1),G=[B,e2]∈Rm2×(n+1);
2)用交叉验证来选择合适的参数c1,c2,c3和c4;
3)通过式(5)和(6)分别计算z1和z2,以获得权向量w1,w2和b1,b2,从而得到两个不平行平面;
4)通过决策函数计算一个新的数据点x∈Rn分别到平面xTw2+b2=0和xTw1+b1=0的距离,以决定这个点属于正类样本还是负类样本。
2 主梁结构分析
本文优化的桥式起重机的基本参数见表1。对其进行优化的主梁为箱型梁,截面如图1所示,根据《起重机设计手册》初步确定主梁的设计变量,见表2。
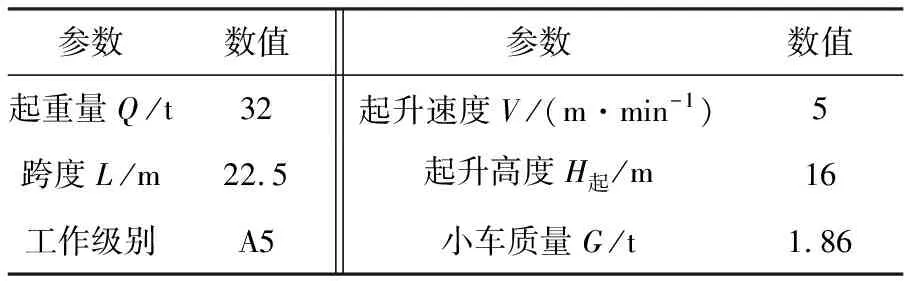
表1 起重机基本参数

图1 主梁界面
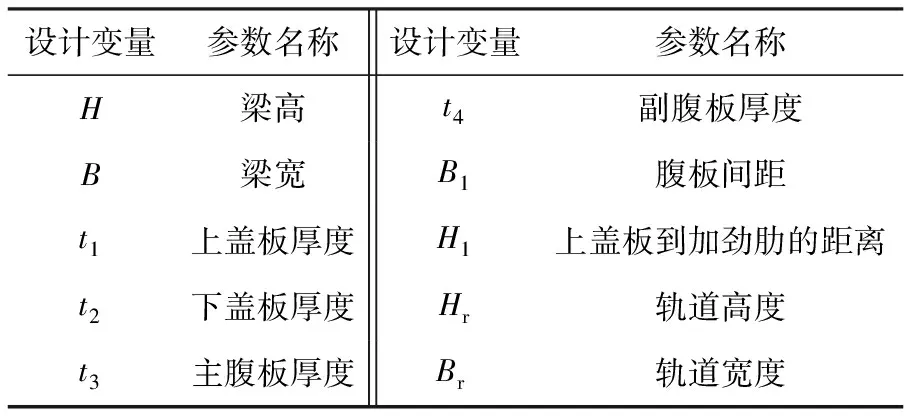
表2 设计变量及名称
对主梁参数进行LSTBSVM算法分析,获得各参数的灵敏度。其中c1,c2,c3,c4的取值范围为{2i|i=-10,-9,…,9,10},ε的取值范围为{10i|i=-8-7,…,7,8},分析结果见表3。
由此可得到主梁截面各参数对主梁质量的灵敏度从高到低的顺序为:H,B,t3,t4,t1,t2,B1,Br,Hr,H1;主梁截面各参数对主梁跨中挠度的灵敏度从高到低的顺序为:H,B,t4,t3,t1,t2,H1,Br,B1,Hr。
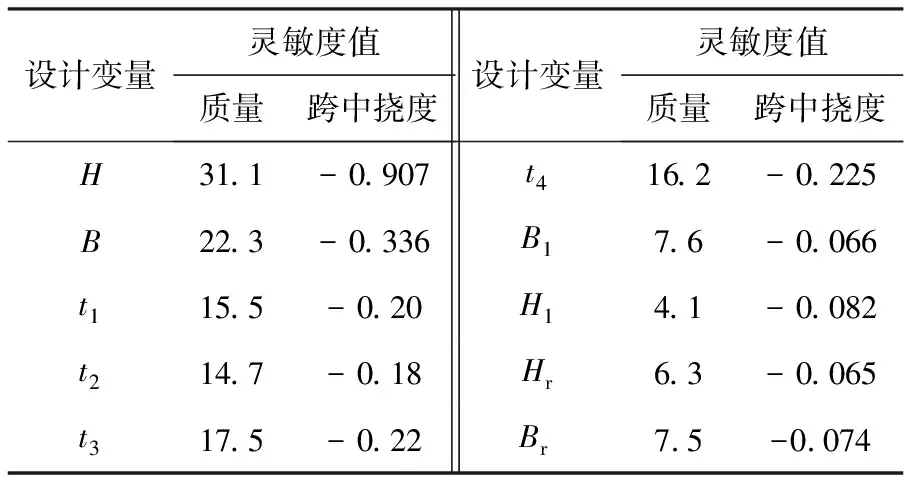
表3 各参数灵敏度值
由此可知,在满足刚度、强度要求的前提下,主梁的梁高、梁宽、主腹板厚度、副腹板厚度、上盖板厚度、下盖板厚度对主梁的质量以及性能的影响较大,因此将上述6个参数作为主要的设计变量对桥式起重机的主梁进行优化设计。
主梁优化的目标函数如下:
(7)
式中:f(x)为主梁截面面积;M(x)为主梁的质量;L为主梁的跨度;ρ为材料密度。
3 蝙蝠算法及其改进
3.1 蝙蝠算法
蝙蝠算法的原理是通过改变声波的频率、声音的强度等模拟蝙蝠利用回声来进行定位的行为,进而控制其飞行的状态(位置和速度),从而在空间中寻找最优解。蝙蝠算法可以归纳为如下6个步骤:
1)参数的初始化。种群规模为size、最大迭代次数为N、搜索变量的维度为d、音强衰减系数为α(常量)、当前迭代次数t、最大脉冲音强为A、频度增加系数为γ(常量)、最大脉冲频度为r0、脉冲频率范围为[fmin,fmax]。初始化蝙蝠个体位置xi(i=1,2,…,d),确定最佳位置x*。
2)种群迭代。更新脉冲频率fi、速度vi, 其中蝙蝠个体飞行规则为
(8)

3)初次生成随机数rand。若rand>ri,选择最优蝙蝠个体。ri为第i只蝙蝠的脉冲发射率。通过随机游走方式按xnew=xold+ε×At生成局部新解,其中ε∈[-1,1],At为整个蝙蝠种群在t时刻的平均脉冲音强,xnew为蝙蝠的新位置,xold为蝙蝠原来的位置。
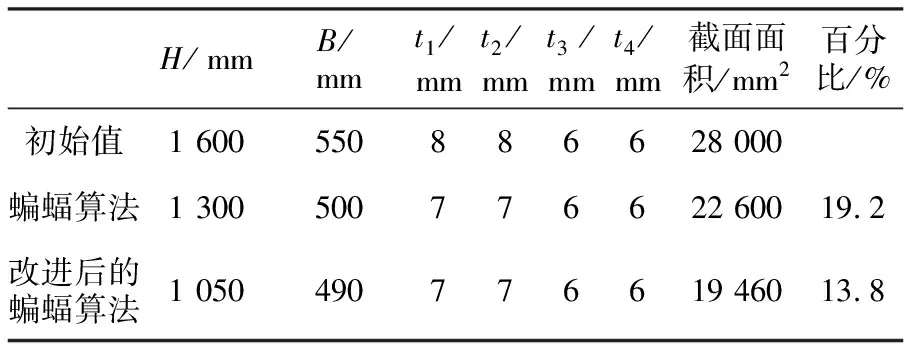
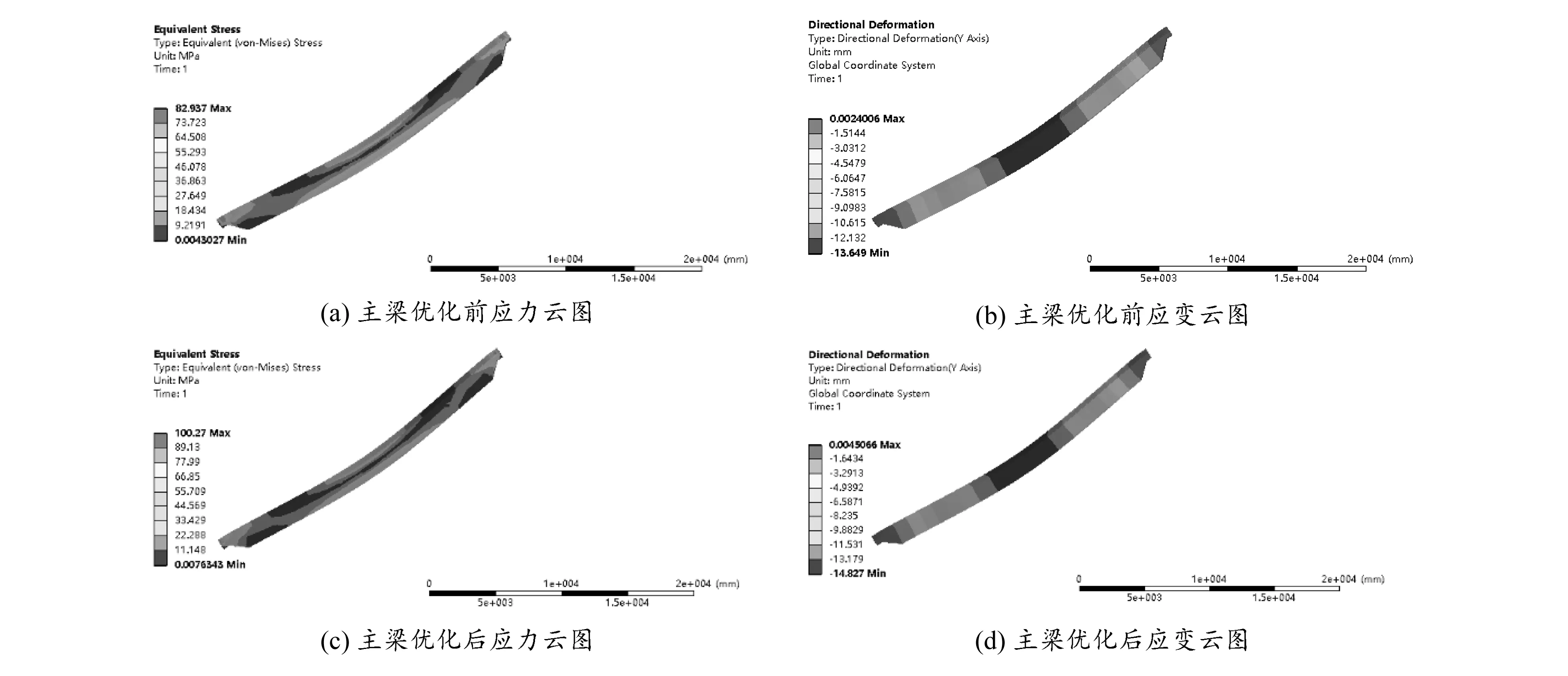
4)再次生成随机数rand,若rand (9) 式中:Ai为第i只蝙蝠的平均响度。 5)按照适应度值的大小进行排序,并且对当前蝙蝠的最优位置及其适应度值进行记录。 6)重复执行步骤2)~5),当迭代次数达到最大迭代次数或达到迭代精度时停止,输出全局最优解和对应的蝙蝠位置。 蝙蝠算法也存在着收敛速度过慢、容易陷入局部最优等问题。目前已有很多人对蝙蝠算法进行了改进,主要体现在两方面[9]:一是针对算法自身存在的变量进行改进,二是将不同算法结合在一起,对某一算法进行优化。 本文对蝙蝠飞行方式进行了改进,提高了算法的收敛精度和速度。使用χ2分布对最优解进行变异,即使用xnew=xold+xold·χ2(n)代替步骤4)中的式(9),进行局部搜索。其中χ2(n)是以算法的迭代次数n为自由度的χ2分布。 改进后的算法首先对最优解进行变异,产生远离最优解的下一代。通过这种方法,可以提高种群的多样性,有效地避免过早陷入局部最优的缺点,随着迭代次数不断增加,使得算法具有更好的局部搜索能力,提高了算法的收敛精度。 分别采用蝙蝠算法和改进的蝙蝠算法对主梁进行优化分析。在MATLAB的实验平台上对主梁进行编程分析。设定样本个数m=100、迭代次数N=300、比例因子为6进行验证,验证结果如图2所示。 采用蝙蝠算法和改进的蝙蝠算法所得的分析结果与初始值的对比见表4。 图2 迭代结果 表4 结果比较 从图2可以看出,蝙蝠算法在45代之后趋于收敛,而改进后的蝙蝠算法在12代之后趋于收敛,因此改进后的蝙蝠算法在收敛速度和求解精度上都有了很大的提高。从表4可知,改进后的蝙蝠算法相较蝙蝠算法主梁的质量减少了13.8%。 为了对比优化前后主梁的性能,对主梁进行静力学分析。将小车起重量加载在主梁的中间,对主梁的端部进行约束,通过ANSYS有限元分析,探究优化前后的主梁强度和刚度,主梁材料属性见表5,有限元分析后的结果如图3所示。 表5 材料属性 图3 有限元分析结果 通过查阅资料可知主梁允许的最大应力为[σ]=158 MPa,最大变形为f=28.1 mm。由图3(c)、图3(d)可知,优化后主梁的最大应力为100.27 MPa,最大变形为14.8 mm,优化后主梁的强度和刚度满足使用要求,表明本文的优化算法是可行的。 目前,GB 3811—2008《起重机设计手册》是最权威的起重机设计手册,但是按照该手册设计出的桥式起重机的主梁强度、刚度等裕度都比较大,造成资源的浪费和企业成本的提高。本文通过采用最小二乘法的孪生有界支持向量机对桥式起重机主梁截面的主要参数进行分析,结合改进的蝙蝠算法对桥式起重机主梁进行优化,对优化后的主梁进行ANSYS有限元仿真分析,结果表明,优化后的主梁满足要求,为桥式起重机主梁的轻量化研究提供了可借鉴的方法。3.2 算法的改进
4 主梁优化分析

5 主梁优化前后的静力学分析

6 结束语
猜你喜欢
机械制造(2022年12期)2022-02-10
中国特种设备安全(2019年7期)2019-09-10
中国特种设备安全(2018年10期)2018-12-18
现代制造技术与装备(2018年12期)2018-02-20
小溪流(画刊)(2016年12期)2017-02-04
中华建设(2016年10期)2016-06-21
西南交通大学学报(2016年4期)2016-06-15
船舶标准化工程师(2015年5期)2015-12-03
微型小说选刊(2015年5期)2015-06-05
小学生·多元智能大王(2014年5期)2014-07-24
