
电缆隧道智能巡检机器人设计探析
2020-02-22 02:58虞鸿江
通信电源技术 2020年2期
虞鸿江
(云南电网有限责任公司电力科学研究院,云南 昆明 650217)
0 引 言
在我国北京、上海、广州等大型城市,地下配电网络已经基本完善,同时大中型城市的电缆隧道建设进度不断加快。根据目前情况可知,电缆隧道具有距离长、温度高、湿度大以及地形复杂等多方面特点,并且电缆的种类较多,电缆之间相互交错纵横。受此影响,电缆易出现腐蚀、老化等现象,并导致火灾的发生。因为电缆需要长期运行,一旦有火灾发生,引起的后果十分严重。随着地下电网的不断普及,对于电缆隧道智能巡检机器人已经具有更加强烈的需求。
1 电缆隧道智能巡检机器人本体设计
1.1 机构设计要求
要求电缆隧道智能巡检机器人能够具有遥控运行、爬坡、避障以及越障等能力,同时能够替代部分人工巡检工作,有效促使电缆检测质量提升以及技术水平提高[1]。因此,对于电缆隧道智能巡检机器人机构设计具有如下要求。(1)以机构运动学为基础,要求机构具有滚动的能力,并能够对隧道内的多种障碍物进行避让或是跨越;(2)以机器人系统为基础,要求机构具有较好的负载能力,以保障电源系统设备、信息传输设备以及检测设备的安装工作能够顺利进行;(3)以实用性为基础,要求机构具有小巧、紧凑以及质量轻的特点,以便于落实携带以及投放工作,同时涉水及防水能力良好;(4)立足于运动控制角度,要求机构具有尽量少的自由度,以保障对其控制的精准性。
1.2 总体结构设计
将电缆隧道特征、巡检任务要求以及机构设计要求相结合,同时对国外相关经验进行借鉴,使用专业软件Pro/E开展建模工作。该结构结合了搜救机器人以及防爆机器人的优点,具有优异的爬坡性能和越障性能,同时具有良好的姿态稳定性,且质量较轻、刚度较大,对其进行应用,隧道电缆巡检功能能够更加顺利的完成[2]。
根据三维模型对样机进行出图、加工和装配,组成部分主要包括控制系统、电源系统、越障系统、驱动系统以及可控云台装置等。为了尽量降低质量,大部分工件使用镁铝合金制作而成,将机器人的总重量控制在6.4 kg左右,同时云台高度为140 mm,摆臂长度为260 mm,长度为360 mm,宽度为260 mm,高度为110 mm。
2 关键部件设计
2.1 行走机构
包括电机、驱动器以及减速器在内的驱动装置、传动轴、履带、传动齿轮以及同步带轮等多个部分共同组成行走机构,传动齿轮带动驱动装置输出轴以及其上的同步带轮进行转动,即能够推动履带抓地展开运动,也就能够实现机器人的前进、转弯、后退等动作。对该行走机构进行应用,在坡度小于或等于30°的斜坡上能够正常行走,并且即使不应用摆臂,高度在50 mm以下的障碍物也能够轻松通过,使机器人的巡检速度在一定程度上得到提升。
2.2 越障机构
包括电机、减速器、驱动器以及编码器在内的驱动装置、传动齿轮、摆臂以及传动轴等多个部分共同组成越障机构,通过驱动装置,力按照输出轴——传动齿轮——传动轴——摆臂的顺序获得传输,并且将摆臂固定于传动轴上,通过对滑动轴承的应用,传动轴能够与机器人壳体之间形成有效的连接,从而顺利完成摆臂的转动。对该越障机构进行应用,150 mm以下的障碍物机器人均能够平稳通过,在一定程度上为巡检工作的顺利开展提供了保障。
2.3 可控云台机构
舵机两个、舵机座、云台壳体、方位轴两个以及热像仪壳体等部分共同组成可控云台机构,使两个舵机于相互垂直的状态下与舵机座进行固定处理,对舵机输出轴与云台方位轴进行连接,使云台能够顺利按照水平方向以及竖直方向进行转动。对该可控云台机构进行应用,机器人所携带的红外设备即能够实现水平方向和垂直方向的连续旋转,从而实现了对电缆运行情况全方位的检测。
3 巡检机器人控制系统设计与实现
3.1 巡检机器人控制系统的要求
相对于地上,地下电缆隧道中开展工作具有更大的难度,根据实践经验,其要求主要体现在如下6个方面。(1)在对障碍进行跨越的过程中,巡检机器人的行走机构以及摆臂机构必须有效配合,并发挥可控云台的作用保障检测角度的准确,而巡检机器人的工作空间较为狭小,所以前行、后退、转弯等控制较为困难。(2)巡检机器人的工作环境中存在大量的未知因素,控制系统必须能够获取可靠的定位信息,对局部环境进行有效识别,从而高效执行动作规划。(3)控制系统需要对传感器信息进行实时处理,特别是图像信息,其包含的数据量较大,需要对信息进行充分融合。(4)巡检机器人不仅需要对电缆的运行情况进行检测,还需要保障各个模块之间的协调,所以必须对巡检任务进行合理分配。(5)巡检机器人不仅工作路线长,且需携带设备数量较多,所以对控制系统的硬件部分提出了较高的要求,如质量轻、体积小、可靠性高以及功耗低等,以保障巡检机器人的续航时间。(6)巡检机器人所工作的电缆隧道通常距离地面5~10 m,在开展工作的过程中,相关工作人员于地上使用手持设备对控制指令进行发送,同时对巡检机器人采集的数据信息进行获取。所以要求数据传输设备的信号穿透能力得到提升,以保障地上手持设备与巡检机器人之间的通信能够持续处于通常状态。
3.2 巡检机器人控制系统设计
根据文中提出的巡检机器人控制系统要求,尝试对多个电机控制以及处理多种传感器信息的控制系统进行设计,设计结构如图1所示。
控制系统主要可以分为两个部分,分别为本体控制单元以及地面遥控/接收数据的移动单元。同时,为了保障巡检机器人能够在复杂的工作环境中安全运行,应该将主从遥控的方式作为控制系统的主要方式。在机器人接收到遥控指令之后,通过对电机驱动进行控制,即能够实现各项功能,并将信息传输给地面[3]。
3.3 系统功能介绍
巡检机器人的控制系统由两部分组成,且两部分之间相互独立,二者之间对于指令和数据的传输,主要采用无线的方式。
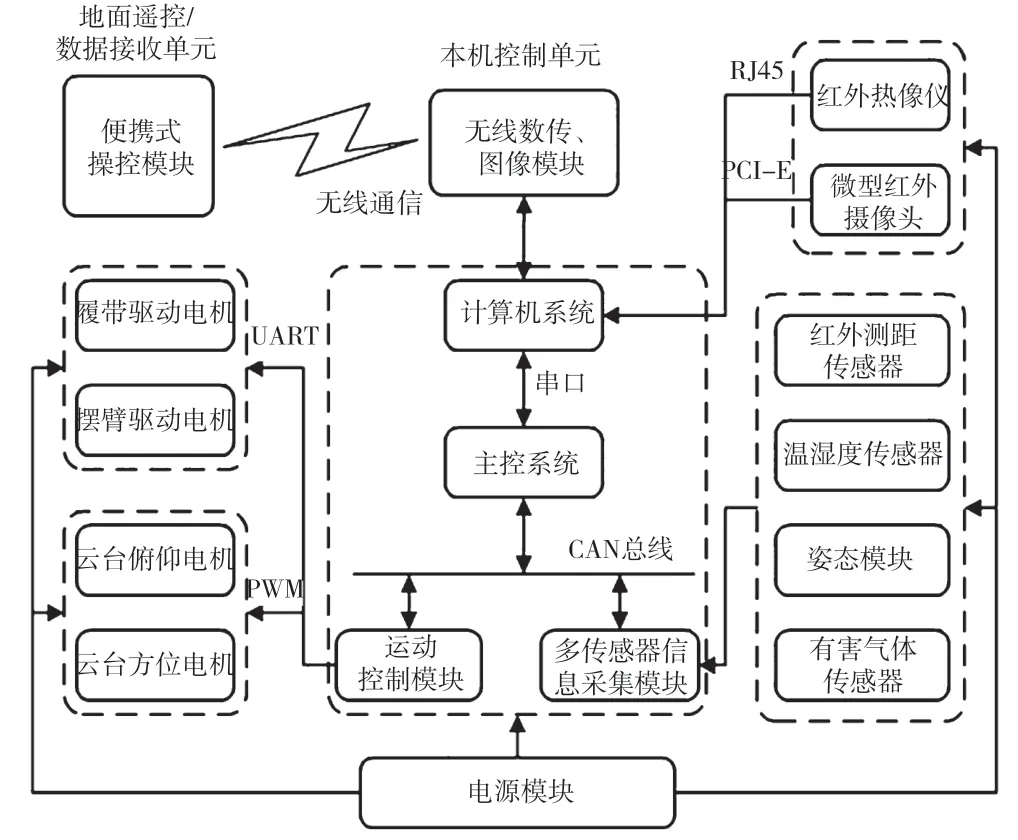
图1 巡检机器人控制系统结构图
地面移动单元的主要组成为平板电脑和无线网卡,应用于对遥控指令的发送以及对实施图像的接收,同时能够对电缆运行情况、隧道环境情况以及机器人情况进行观察和分析。此外,如果地面移动单元与机器人之间出现通信连接中断的情况,移动单元能够及时发出信号进行警报。
本体控制单元的主要组成为计算机系统、红外热像仪、视频采集卡、主控系统以及无线网卡等,其通过串口实现与计算机系统的通信,同时以所接收到的指令为基础,对各个电机驱动器、云台舵机开展控制工作,并通过传感器等将获取的数据信息传输至计算机系统之中;计算机系统能够对数据信息进行实时接收和整合,再将其统一发送至地面[4]。
根据电缆红外热像图以及普通图,工作人员即能够对电缆运行情况正常与否进行判断,如果其中存在故障,工作人员也能够通过此对故障进行准确定位。但是,电缆隧道内的情况较为复杂,属于非结构化的环境,所以必须采用主从遥控的方式对巡检机器人的运动轨迹进行规划。地面工作人员在接收到图像以及信息之后即可展开分析工作,科学合理地选择最为适宜的方式控制巡检机器人安全跨越障碍,并且如果巡检机器人出现故障,或是发生其与地面移动单元连接中断的情况,巡检机器人能够立即停止工作。
3.4 巡检机器人工作过程
以巡检机器人实际的工作任务需求为基础,对其工作示意图(见图2)以及工作流程图(见图3)进行制作。
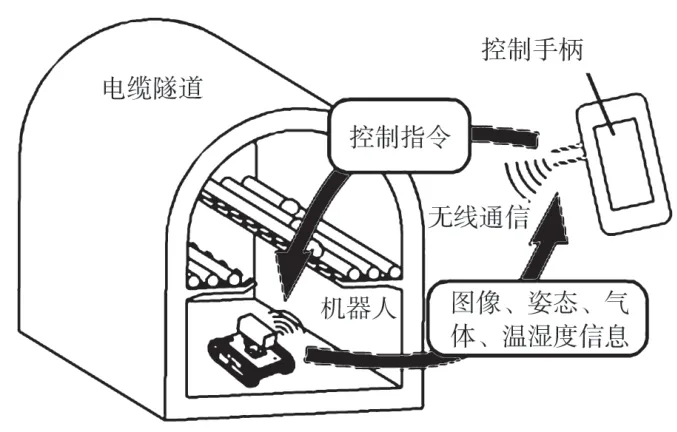
图2 巡检机器人工作示意图

图3 巡检机器人工作流程图
将巡检机器人放置于电缆隧道的入口处,进行上电并建立起无线通信连接,发出指令之后控制机器人运行。在巡检机器人沿隧道行走的过程中,使用微型红外摄像头以及红外测距传感器对前方障碍情况进行检测,若情况需要,还应通过云台转动的方式对拍摄角度进行调整。拍摄到的图像能够实时传输至显示器上,工作人员即能够对电缆情况进行判断,以便决定是否开展维护工作。此外,因为已经对巡检机器人进行了相应的防水处理,所以,即使有浅水洼出现,也能够直接越过[5]。
若检测结果显示存在障碍物,巡检机器人则能够停止前进,并对障碍物的类型进行判定,在障碍物高度大于履带轮直径,则应采用主从遥控的方式对巡检机器人进行调整,具体如下。(1)向机器人前进方向转动摆臂;(2)通过摆臂的支撑提高机器人高度;(3)机器人靠近障碍物直至摆臂末端与障碍物的底部进行接触;(4)摆臂反向转动一定角度,使前履带能够搭靠于障碍物;(5)机器人高度再次提高,向前运行,完成障碍物跨越。
4 结 论
对巡检机器人的爬坡、越障方式进行科学合理的规划,同时对其特点以及需求进行充分分析,最终实现了图像信息的实时采集、无线传输、接收以及显示工作,能够有效提升电缆隧道巡检工作的效率。
猜你喜欢
商品与质量(2021年43期)2022-01-18
摄影之友(影像视觉)(2020年2期)2021-01-14
动漫界·幼教365(中班)(2020年3期)2020-04-20
影像视觉(2020年2期)2020-03-19
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年23期)2019-02-23
好孩子画报(2019年10期)2019-01-10
电子制作(2018年1期)2018-04-04
摄影之友(影像视觉)(2017年11期)2017-11-27
航空模型(2016年5期)2016-07-25
