
基于模糊控制的IPMSM起动阶段的无位置控制算法研究
2020-02-22 00:57赵维卫
科学导报·学术 2020年53期
赵维卫

【摘 要】针对永磁同步电机,尤其是内置式永磁同步电机无位置控制算法在电机起动阶段时无法精确调节转速的缺陷,本文基于模糊控制理论,对电机起动阶段设计了一种模糊自适应PID控制算法,通过MATLAB软件搭建模糊规则并在Simulink中进行了仿真,通过比对模糊自适应PID控制算法与增量式PD控制算法及传统PID控制算法的效果,验证了该算法能够在电机无位置控制的起动阶段仍然能够获得较好的动态性能,具备一定有效性。
【关键词】内置式永磁同步电机(IPMSM)、模糊控制、PID控制、无位置控制
1.引言
永磁同步电机(permanent magnet synchronous motor,PMSM)因其高功率密度、转矩密度以及优秀的功率因数,被广泛应用于工业、制造业等领域,尤其以电机安装空间有限的情况下,内置式永磁同步电机(Interior permanent magnet synchronous motor,IPMSM)是一种不错的选择。在以往的永磁同步电机控制中,大多采用一种独立的位置传感器来采集转子的实时位置,这类型的代表有光电编码器与旋转变压器[1],这对于需要高精度或是伺服控制的场合是必要的。而对于一般精度即可满足的调速系统中,为降低电机设计制造成本,进一步获得电机工作中转子位置的精确度,电机无位置控制技术应运而生[2]。虽然无位置控制技术能够在电机高转速状态下具有较高的精确程度,但在電机低转速阶段,这种控制方法获得的转子位置的精度则较差[3]。这一缺点使得无位置控制在全转速区域的位置精度有很大差异,严重影响了这一控制方法的应用与电机运行的稳定性,现已成为无位置控制策略需要尽快解决的技术难题。
在国内外的主要研究发展中具有代表性的有如下成果:董苏等[4]的无位置控制相关研究基于滑模观测器,设计了一种针对IPMSM的无位置控制算法,该研究基本完成了转速由低至高的全范围转速控制,但由于电机自身的抖动及低速启动时存在的固有问题,该方法存在电机可能无法启动的风险。易伯瑜等[5]人的电机无位置控制算法使用了双段卡尔曼滤波方法,这种方式对于位置计算的精确程度有很大的优点,同时又具备运算简单的特点,但是,对于特定电机的参数和电机模型,该算法则要求得很严格,如遇到实际情况与模型存在偏差,则可能导致电机起动失败。寿利宾等人的无位置控制研究采用了高频注入法,对电机施加高频的激励,这样电机转子的凸极位置就可以被观测,针对内置式永磁同步电机这种方法同样有效,但检测的信号精度不高,且整个系统存在较大的延时性。
本文基于模糊控制算法,针对电机无位置控制中的起动阶段难以精确计算转子当前位置的问题,进行了相关研究。这种算法不需要精确的电机参数或模型,且能够提升电机控制系统的工作效率,具备较强的通用性。针对实际控制效果进行了实验,验证这种控制算法的可行性。
2.无位置控制算法与传统位置控制方案的对比
2.1对电机体积重量的优化
在传统的有位置传感器的方案中,旋转变压器是一种常用的手段,这种方式对于电机转动惯量有较大的影响,在电机转动时,其粘滞系数也会受到很大影响,这些参数严重制约了电机的动态性能。
2.2可靠性
电机设计与制造的研发过程中,加装位置传感器是重要的工序之一,电机的日常使用与保养中,位置传感器的因素也增加了工作量。在电机控制器的结构设计中,位置传感器的引出线缆也要考虑在内,这增加了电机产品的复杂程度。而在电机控制器的电路设计中,对于旋转变压器的解码是必不可少的,使得控制电路部分变得更加复杂,这对于控制系统的可靠性是不利的。尤其是在电磁信号复杂的环境中,解码电路也可能成为受干扰的单元,直接影响位置解算的结果[6]。
2.3特殊工况下的使用需求
当电机本体内部包含位置传感器的情况下,则电机在极端温度、湿度、盐雾或霉菌的工况下就不适宜工作,而采用无位置控制的电机则不受这些工作环境的约束。
2.4降低产品成本
电机内部集成位置传感器,不可避免地增加了电机原材料的制造成本,以旋转编码器为例,一个高精度十六位的旋转编码器的价格甚至高达数千元,这对于产品设计与产品价格竞争力都是不利的。
2.5无位置控制方法实现的基础
现如今,大规模集成电路的发展日臻成熟,这些产品在成倍提升其运算性能的同时,电子芯片的价格却逐渐降低。在电机控制领域,以广为使用的DSP为例,如美国TI公司研发的低功耗数字处理芯片28xx系列,在满足内部高速运算的基础上,同时集成了必需的外围电路。这使得设计师在降低控制电路复杂程度的同时,提升了电路部分的通用性,同时芯片的高速运算性能可以满足无位置控制方法中必备的位置解算工作。除此以外,由现代控制理论产生的多种智能控制算法,例如自适应控制、神经网络控制等大量应用,对于无位置调速控制起到了巨大的帮助,这些控制算法的应用,反过来也促进了永磁同步电机在更多领域中的应用[7]。
3.模糊控制策略
作为智能控制算法中的一种,模糊控制策略因其独有的优点,即不需要被控对象的精确数学模型,但控制效果却具备强鲁棒性,这使得模糊控制在不能精确获得模型的控制系统中的应用极广。同时,模糊控制算法是通过数字控制实现的非线性化控制算法,它对控制系统参数的适应性很强,这一点是电机控制中常用的PID控制所不具备的。
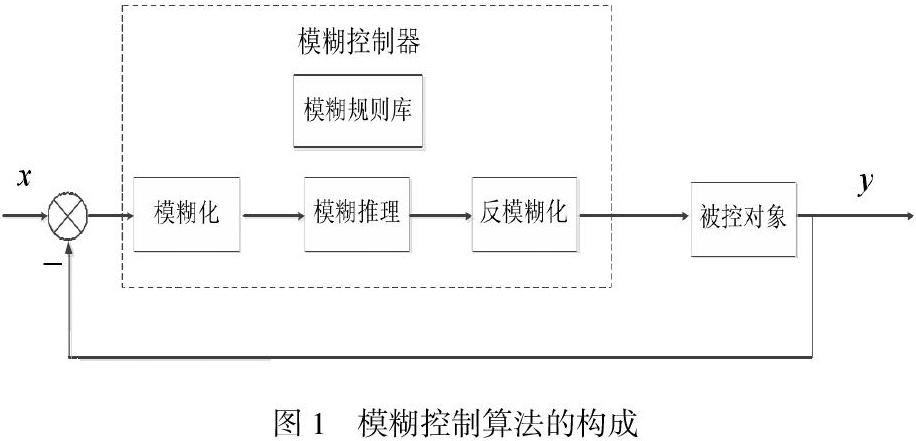
一个常见的模糊控制算法由模糊化,模糊推理,反模糊化这三个部分构成,如图1所示。
在模糊控制算法中,模糊推理是最重要的部分,它的主要内容有模糊规则、合成推理算法和模糊判决,主要目的是为了确定系统的模糊规则和隶属度函数。模糊化是为了将输入变量在论域进行变换,将变量与模糊规则进行对应,使输入变量处于模糊规则的合理范围中。反模糊化对模糊控制器的输出信号进行处理,转变为实际物理量,控制被控对象。
在IPMSM的无位置控制这一领域中,模糊控制的主要工作是对电流误差信号及其增益进行模糊化,基于电机转速的误差及误差变化量不断调整电机的增益,令电机控制系统获得更优的动态性能。
4.模糊控制规则
内置式永磁同步电机控制系统由于电机本体制造工艺和其有限安装空间导致的差异性影响,对于不同的系统,其结构以及动态性能参数差异较大。为应对这种差异导致的电机起动阶段调速性能偏差,本文使用模糊自适应的PID的智能控制算法。这种算法兼具自适应识别控制参数的优点,又具有模糊控制算法对控制对象不用建立精確模型的优点,以及传统PID性能稳定、鲁棒性优异、动态性能出色的优点。
模糊自适应 PID 控制算法由传统PID控制和模糊控制理论结合而成,该控制算法的主要特征为两输入三输出。输入参数进行模糊推理运算,包括系统输入误差e和误差变化de。输出参数为PID的三个参数Kp、Ki和Kd。模糊自适应PID控制框图如图2所示。
由上图可知,一个典型的电机控制系统中,系统实时监测误差e和误差变化de,根据系统的模糊控制器推理出PID的参数最优解。然后实现PID控制器上参数的即时更新,使控制系统在不同工况下都能表现出较好的调速特性。PID控制的各个参数在不同工况下,参数的作用也不同,且各参数具有一定的耦合性,以下列三种情况最为典型:
(1)当误差e的绝对值较大,Kp取较大值,Kd则较小值,并令Ki取零值,用于加快系统响应速度并减小超调量。
(2)在误差e的绝对值为中等时,Kp取较小值,Kd和Ki取适中值,减小系统超调量和稳态误差。
(3)当误差e的绝对值偏小,Kp和Ki取较大值,Kd的值取适中,使系统获得较好的稳态特性,避免系统在稳态时产生振荡。
将误差e和误差变化率de在论域上平均分割为5个模糊子集,分别对应正向较大、正向较小、零值、负向较小和负向较大。而输出3个参数则只分割为3个模糊子集,分别对应大、中、小。根据上述的调制原则,可得三个参数的模糊规则。如下表1、表2 和表3所示。
5.模糊控制器设计
现代的控制系统设计通常对所设计的控制器和算法进行软件仿真设计,待仿真结果满足预期目标后再进行后续工作。本文利用MATLAB软件平台来搭建基于模糊自适应PID控制算法的永磁同步电机控制系统模型,在软件中搭建了模糊自适应PID控制算法、增量式PD模糊算法和传统PID算法,对三种算法进行仿真,并比较控制效果。
具体实现方法为:
(1)输入变量与输出变量的设定,在MATLAB软件命令栏输入Fuzzy并按回车键进入模糊控制设计界面,在新建文件时采用Mamdani推理方法,系统默认为一个输入变量与一个输出变量,点击Edit按钮并选择Add Variable 增加2个输入变量,并将·新增的变量名字修改为速度误差Error,误差变化率Change Error和调整因子K,修改输出变量名称为U。模糊运算逻辑“与”设定为min,逻辑“或”设定为max,蕴含因子设定为min,合成因子设定为max。清晰化方法选用重心法算法。如下图3所示。
(2)在上述窗口中选中Edit按钮进入隶属度函数编辑器,设置速度误差、误差变化率以及调整因子的论域范围均为[-6,6],在隶属度函数曲线设定窗口中,使用默认的三角形函数。如下图4所示:
(3)建立规则库,规则图具体如5所示:
(4)在仿真界面调用设计好的模糊控制器,分别搭建增量式PD模糊控制算法和模糊自适应PID控制算法的仿真图,此外,还搭建了传统PID算法,分别进行仿真并分析比对,控制器三维视图如图6所示。
6.仿真与测试
针对表4的永磁同步电机,基于MATLAB软件平台的Simulink仿真工具,搭建永磁同步电机控制系统。分别建立传统PID控制器、增量式模糊PD控制器和模糊自适应PID控制器,对比三种控制器的动态性能。其中,传统PID控制器见图7,增量式模糊PD控制器见图8,模糊自适应PID控制器见图9.
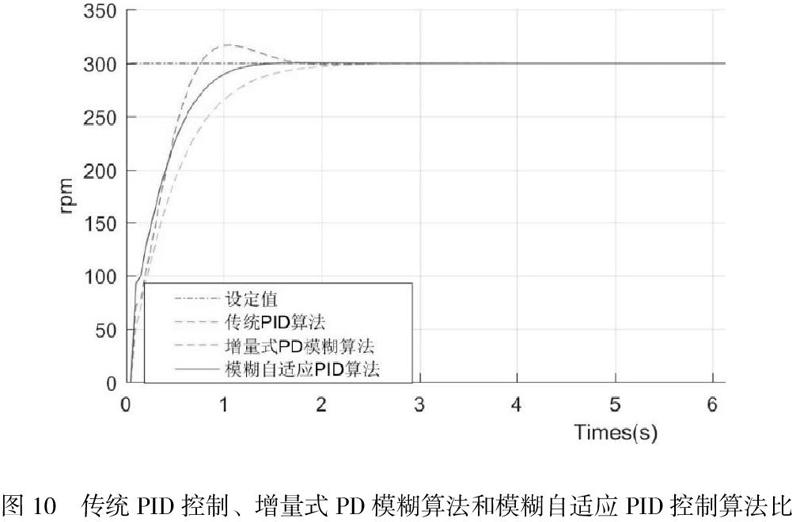
采用模糊控制策略的增量式模糊PD算法与传统的PID控制进行对比,仿真结果如图10所示。PID控制器具有良好的跟踪响应特性,但超调量大;增量式PD模糊控制器无超调量,但是牺牲了系统的响应速度。控制系统性能需要需要进一步优化。
分析图10的系统响应仿真结果可得,模糊自适应PID控制算法兼具增量式PD模糊控制算法和传统PID控制算法的优点,电机起动阶段调速没有超调和振荡,而且具有快速的响应时间,在本次仿真中,电机从起动到300rpm,响应时间为1.2s,可以满足永磁同步电机的无位置控制在起动阶段无超调,响应快的要求。
7.结论
本文对传统IPMSM的无位置控制算法进行分析并探索优化策略。在电机起动阶段,此时由于电机反电势波形信号微弱且观测误差较大,针对这一问题,本文采用了模糊控制的智能控制算法,建立了对应的模糊自适应PID控制器模型,通过MATLAB以及Simulink进行了电机控制系统仿真与验证,该方法能够有效地减少电机起动阶段的超调量,并缩短电机加速时间。系统具有较强的鲁棒性,并能够保持可靠与稳定,具备一定的实用意义与参考价值。
参考文献:
[1]尚喆,赵荣祥,窦汝振. 基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007,27(3):23-27.
[2]杜栩扬,胡育文,鲁文其. 基于准滑模观测器的PMSM无位置传感器控制[J]. 电气传动,2010,40(5):32-35.
[3]BOSE B K. A High-Performance Inverter-Fed Drive System of an Interior Permanent Magnet Synchronous Machine[J]. IEEE Transactions on Industry Applications,1998,24(6):987- 997.
[4]董苏,赵烨,戴鹏. 一种新型IPMSM无位置传感 器矢量控制系统研究[J].电气传动,2013,43(5):11-15.
[5]易伯瑜,康龙云,林玉健,等. 基于双段卡尔曼滤波的永磁电机无传感器控制[J]. 华南理工大学学报,2013,41(12):49-55.
[6]郭清风,杨贵杰,晏鹏飞. SMO在无位置传感器PMSM驱动控制系统的应用[J]. 电机与控制学报. 2007,11(4):354-358.
[7]Kim H,Son J. Lee J. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. Industrial Electronics,IEEE Transactions on,2011,58(9):4069-4077.
(作者单位:贵州航天林泉电机有限公司)
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
现代电子技术(2009年13期)2009-08-31
