长大下坡道条件下的高速铁路闭塞分区布置研究
2020-02-25 08:21高国隆杨晓军
铁道运输与经济 2020年2期
高国隆 ,张 杰 ,杨晓军
GAO Guolong1,2,3, ZHANG Jie1,2,3, YANG Xiaojun4
(1.西南交通大学 交通运输与物流学院,四川 成都 610031;2.西南交通大学 全国铁路列车运行图 编制研发培训中心,四川 成都 610031;3.西南交通大学 综合交通运输智能化国家地方联合工程 实验室,四川 成都 610031;4.中国铁路西安局集团有限公司 西安北站,陕西 西安 710016)
0 引言
近年来,我国高速铁路的发展建设开始向中西部转移,大西客运专线(大同—西安北)和西成高速铁路(西安北—成都东)相继建成并投入运营。《铁路技术管理规程》中定义长大下坡道为:线路坡度超过6‰,长度为8 km 及以上;线路坡度超过12‰,长度为5 km 及以上;线路坡度超过20‰,长度为2 km 及以上。而高速铁路中动车组运行速度和制动性能较机车牵引式列车大幅提升,因而高速铁路中所研究的长大下坡道是指诸如我国大西客运专线和西成高速铁路等长度超过20 km 且坡度大于20‰以上的坡道。动车组在高速铁路长大下坡道运行时,由于重力作用及列控系统在接收到线路坡度数据后的冗余处理,会导致列车监控制动距离远大于平直道,并由此引发车载设备提前制动、应答器容量不够和高速列车不能实现设计速度等一系列问题。因此,在布置长大下坡道条件下高速铁路的闭塞分区时,列车运行速度、列车制动距离、应答器容量及列车运行追踪间隔时间等都会对闭塞分区造成影响和制约,在进行信号布置时需予以综合考虑。
闭塞是根据信号或凭证,使列车按照空间间隔制运行,保证区间或闭塞分区在同一时间内只能运行一个列车的技术方法。而闭塞分区布置的实质则是一个在安全行车的基础上确定区间分界点(信号点)具体坐标的过程,需要满足以下要求:区间长度满足列车制动安全距离和轨道电路应答器容量,保障列车追踪运行的安全;信号设备的安放必须符合线路条件;尽量不影响列车的运行速度;达到一定的列车追踪间隔时间,保证线路的通过能力。对于闭塞分区的布置,国外学者主要以城市轨道交通作为研究背景,较少针对高速干线铁路开展研 究[1-3],而高速干线铁路无论是线路条件还是列车运行控制都更为复杂,列车运行速度更高,问题求解时所考虑因素不同。国内学者虽然已经对传统的基于自动闭塞的区间布置问题做了大量的研究,但针对高速铁路准移动闭塞条件下的研究较少,且均不包含线路条件[4-8]。同时,对长大下坡道方面的研究近几年才逐渐展开,研究方向主要集中于列车运行控制方式[9-10]。
针对以上问题,结合长大下坡道条件下列控设备及安全管控特点,在长大下坡道条件下,列车监控制动距离较平直道大幅延长,闭塞分区长度将对列车运行速度和追踪间隔产生较大影响,此时列车监控制动距离将可能超出轨道电路应答器容量要求,并使区间追踪间隔成为列车追踪间隔的制约值。因此,长大坡道条件下的高速铁路闭塞分区布置是一个复杂的优化问题,需要结合长大下坡道闭塞分区划分方法及行车间隔要求构建优化模型进行求解。
1 长大下坡道条件下的高速铁路闭塞分区布置模型
1.1 变量定义
针对长大下坡道线路区段的车站A 和车站B之间的区间AB,设该区间有m个坡道,各变坡点的坐标用xpj表示,则每个坡道的长度为=-坡度为ij;线路上有s个限速点,各限速点的坐标为,限速值为vk,限速曲线以vk(x)的形式表示;列车在线路上的实际运行速度为v,运行曲线以v(x)曲线的形式表示;根据给定的闭塞区间数量n,由来表示闭塞分区分界点(即信号机)
1.2 目标函数
该模型以闭塞区间数量n作为计算的前提,其取值范围如下。

式中:lmax为闭塞分区设置的最大长度,m,在准移动闭塞条件下通常定为3 000 m;lmin为工程人员根据现场实际情况而确定的闭塞分区最小长度,m;lscction为车站A 和车站B 之间的区间线路长度,m;n为闭区的间数量,个。
因此,根据给定的闭塞区间数量n,再结合列车追踪间隔的计算方法,以优化列车追踪间隔时间为目标,设计长大下坡道条件下的高速铁路闭塞分区布置优化模型的目标函数如下。
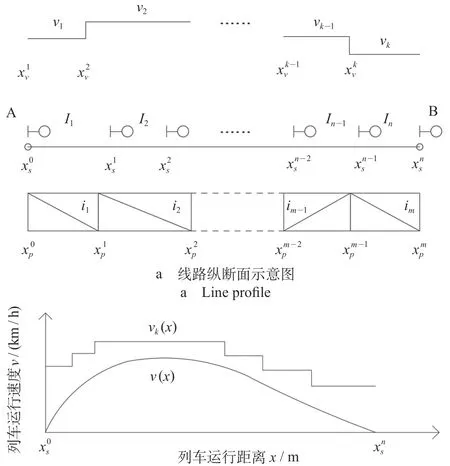
图1 高速铁路闭塞分区布置模型示意图Fig.1 Signal block layout model sketch map

式中:fn(x)为目标函数,即闭塞区间为数量n时,该线路的最小列车追踪间隔时间,s;In为第i个区间的列车区间追踪间隔时间,s;I追,I到,I发及I通分别为列车的区间追踪间隔时间、车站的到达追踪间隔时间、车站的出发追踪间隔时间及车站的通过追踪间隔时间,s;L制,L防,L闭,L列,L咽喉,L标分别为列车制动距离、列车安全防护距离、闭塞分区长度、列车长度、车站咽喉区长度及停车标位置至出站信号机距离,m;t附加,t到达,t出发及t通过分别为列车区间追踪运行附加时间、到达作业时间、出发作业时间以及通过作业时间,s;Sk和Se分别为制动空走距离和制动有效距离,m;b,w0和ij分别为列车的单位制动力、单位基本阻力以及单位加算坡道阻力,N/kN;v0为列车的制动初速度,km/h;tk为列车制动的空走时间,s;γ为回转质量系数;v1和v2分别为速度间隔段的初速度和末速度,km/h,通常相差不超过10 km/h。 CRH380BL 车型制动距离L制计算统计表如表1 所示。

表1 CRH380BL 车型制动距离L制计算统计表 mTab.1 Calculation table of braking distanceL制for CRH380BL
t附加,t到达,t出发及t通过的取值参照《高速铁路列车间隔时间查定办法》,CTCS-2 级及CTCS-3级列控条件下,列车进路作业时间如表2 所示。
1.3 约束条件
根据闭塞分区划分的影响因素,将上述目标函数的约束条件定义如下。
(1)区间信号点位置条件。区间信号点必须安放在规定的限界内,即位于A 站出站信号机和B站进站信号机之间,需要满足如下条件。

式中:为A 站出站信号机位置坐标,m;为区间信号机位置坐标,m;为B 站进站信号机位置坐标,m。

(2)闭塞分区长度条件。闭塞分区长度必须要在合理的范围内,并且所有闭塞分区长度之和要与站间区间的长度相匹配,需要满足的条件如下。

式中:为第i个区间的长度,m;lmin和lmax分别为闭塞区间布置所允许的最小长度和最大长度,m。

式中:lsection为站间区间的长度,m。
(3)第一离去信号点位置条件。第一离去信号点与反向进站信号机之间的距离必须大于附加走行距离、出站限速制动距离及安全防护距离三者之和,需要满足以下条件。

式中:为A 站第一离去信号点坐标,m;为反向进站信号机坐标,m;lf为列车在附加时间(各种设备动作时间、司机反应时间等)的走行距离,m;为列车由出站限速到0 km/h 的制动距离,m;ls为安全防护距离,m。
(4)第二接近信号点位置条件。列车到达追踪间隔时间是限制运输能力的主要因素之一,需要设定合适的第二接近信号点的下限位置来满足其间隔时间标准。

(5)轨道电路正常码序显示条件。CTCS-2 级列控系统下,轨道电路的码序为 HU,U,LU,L,L2,L3,L4 (L5 预留)。为满足其显示要求,追踪序列上的各闭塞分区长度之和必须大于列车常用制动距离、附加走行距离及安全防护距离三者之和,需要满足的条件如下。式中:Ncode为列控系统轨道电路码序位数;Sbxt为列车在xt位置从限速到0 km/h 的常用制动距离,m。

(6)电分相条件,根据信号机与电分相的相对位置分为以下2 种情况。
①位于电分相后端的信号点需要满足的条件 如下。

式中:xL为电分相强制断电标位置,m。

式中:a为列车起动平均加速度,m/s2;vf为通过电分相最小速度值,m/s2,其取值为8.4 m/s2。
②位于电分相前端的信号点需要满足的条件 如下。

式中:xR为电分相强制断电标位置,m。

式中:Sf为电分相合电标到前方信号点的最小长度值,m,其取值为300 m。
(7)信号点前停车起动条件。列车在信号点前停车后,必须保证能够再次起动,并且不会出现溜车的现象,该条件对机车的起动牵引力有者严格的要求,具体如下。

式中:Fxsi为列车在位置处的起动牵引力,N;Gq和P分别为车辆和机车的质量,t;,分别为机车、车辆起动时的单位阻力,N/kN;iq为起动地段的加算坡度千分数;g 为重力加速度,m/s2,通常取9.81 m/s2。
(8)路段限速条件。根据线路的限速方案,列车在各限速点的运行速度必须要低于该点的限速值,需要满足以下条件。
式中:v(x)为列车在区间运行的速度曲线;vk(x)为区间的限速曲线。
(9)区间运行时分条件。为了保证线路的运输效率,列车的区间运行时分也必须在合理的范围 之内。
列车在第i个区间的平均运行速度可由以下公式表示。

式中:vi为列车在第i个区间的平均运行速度,km/h。
则列车在整个线路区间上的运行时分需要满足以下要求。

式中:Tlim为给定的车站A 和车站B 之间线路的区间运行时分标准,s。
2 算法求解
上述模型以均为实数的信号点坐标作为变量,由不同的取值组合成闭塞分区布置方案,计算规模庞大,难以通过有效的数学优化方法对其求解,需要采用合适的算法进行求解。而遗传算法(Genetic Algorithm,GA)采用一串实数变量进行染色体编码,并由大量候选解进行适应度筛选、概率搜索最终得到最优解的求解过程,该算法染色体的编码结构正好与本模型的布置方案相对应。因此,采用实数编码的遗传算法来计算求解该问题,遗传算法基本步骤如图2 所示。
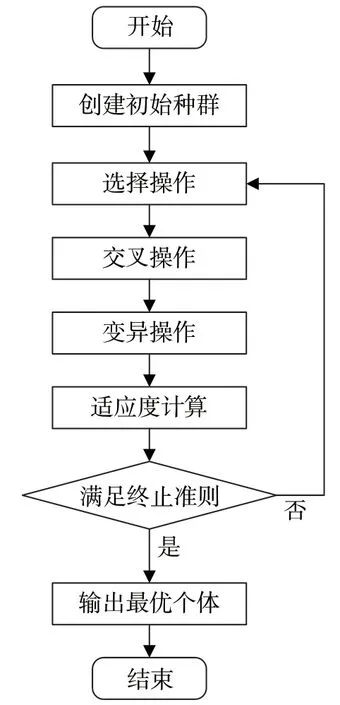
图2 遗传算法基本步骤Fig.2 Steps of a genetic algorithm
(1)确定编码方案。采用长度为n+1 的染色体来表示一套闭塞区间布置方案, 染色体中的各个体基因(i= 0,1 ,…,n)代表着区间信号点的具体坐标,将xsi以实数形式进行编码。
(2)初始种群生成。为了获取高质量的初始种群,提升算法的收敛速度,结合所建立的模型设计了初始种群生成算法,将算法中编码范围r的取值定为200,初始种群生成算法如图3 所示。
(3)确定适应度函数。遗传算法在进化过程中通过种群的个体适应度来进行搜索,因而适应度函数(Fitness Function)的选取直接影响到遗传算法的收敛速度以及最优解的寻找。该函数应与生物进化机理相结合,使适应度高的染色体继续繁衍进化,并通过尽可能简单的函数设计来实现高效率的计算,模型的适应度函数fitness定义如下。

式中:k是为保证求解精度而设置的常数,取值为0.001;fit1,fit2和fit3分别表示信号点布置次序错误、闭塞分区布置长度不符合设计规范及制动距离时,对个体适应度值的影响;α,β和γ均为惩罚因子,取值在25 到45 之间。
(4)进行遗传运算。
①选择操作。“选择”操作采用轮盘赌选择法,利用个体适应度所占比例的大小来决定其子孙保留的可能性。该个体被选择的概率为

式中:fi为某个个体i的适应度;N为种群大小。
为了选择交叉个体,需要进行多轮选择,每一轮产生一个[0,1]内的均匀随机数,将该数字作为选择指针来确定被选个体。
②交叉操作。首先,从交配池内随机取出需要交配的个体对;再根据串长度n+ 1,对要交配的个体对,随机选取[1,n]中的一个或多个整数作为交叉位置;最后,根据交叉概率pc实施“交叉”操作,在配对个体的交叉位置相互交换各自的指定基因,形成新的个体。通常pc的取值在0.25 到1之间。
③变异操作。“变异”操作是对群体中的每个个体,以变异概率pm将某一个或一些基因座上的基因值改变为其他的等位基因值。对种群中的每个染色体随机产生一个(0,1)之间的随机数ε,当ε<pm时对该染色体进行“变异”操作。
(5)确定算法终止条件。常用的算法终止条件是给定最大的迭代次数NG,当程序运行NG次后结束,输出优化结果。
3 算例分析
假设车站A 和车站B 之间的线路为长大下坡道,两车站的坐标分别为0 km 和50 km,线路纵断面示意图如图4 所示。
选取CRH380BL 作为目标车型,若按传统等距离划分原则对该线路进行闭塞区间布置,则传统闭塞区间布置方案如表3 所示,该方案下的其他追踪间隔时间如表4 所示。

图4 纵断面示意图Fig.4 Line profile
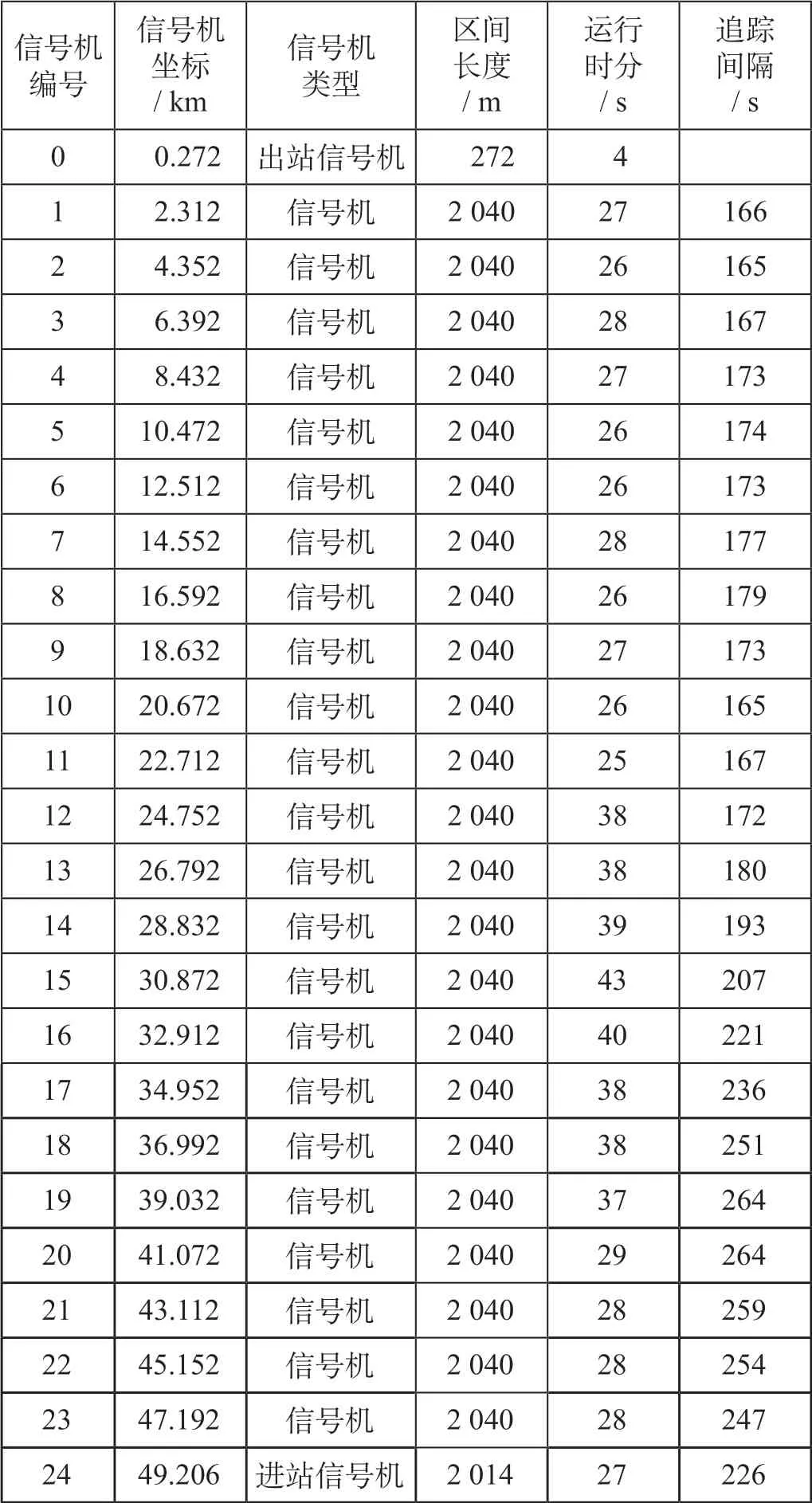
表3 传统闭塞区间布置方案Tab.3 Traditional signal block layout result

表4 其他追踪间隔时间 s Tab.4 Other train headway with optimization
除进站和出站信号机外,该区间内一共布置了23 台通过信号机,并且布置方案的最大区间追踪间隔时间为264 s,最终确定的列车追踪间隔时间为264 s,列车通过整个区间的运行时分为762 s。
为了与传统的布置方案进行对比,将线路设备数量n定为24 并选取相同车型,使用该优化模型算法计算求解得出一定线路设备成本下的优化布置方案。n取值24 时,闭塞区间优化布置计算结果如表5 所示,闭塞区间优化布置结果示意图如图5所示,该方案下的其他追踪间隔时间如表6 所示。
由表中数据可知,在通过信号机数量与传统布置方案相同的前提下,优化布置方案的最大区间追踪间隔时间由264 s 缩短至203 s,最终确定的列车追踪间隔时间由264 s 缩短至214 s,列车通过整个区间的运行时分为746 s。通过优化布置,列车区间追踪间隔时间得到了有效的缩减,并且各项数据指标均满足目前高速铁路的运输组织要求,实现了列车区间追踪间隔优化。

表5 闭塞区间优化布置计算结果Tab.5 Optimized signal block layout result

图 5 闭塞区间优化布置结果示意图Fig.5 Optimized results of signal block layout
4 结束语
与传统信号布置方式相比,长大下坡道条件下的高速铁路闭塞分区布置方法能够在保证列车安全行车的前提下,有效地缩短了约20%的列车区间追踪间隔时间及3%的区间运行时分,使得线路行车效率以及运输能力得以提高。该方法能够为我国高速铁路长大下坡道的信号设备提供一种新的布置方案,可在新线建设中起到辅助设计的效果,同时也能够对能力不足的旧线改造提供一些参考。此外,通过模型算法来研究闭塞区间的布置问题,将对高速铁路未来智能化、信息化的发展具有一定的推进作用。但是,目前该方法所构建的布置模型仅适用于一般线路,尚未考虑桥梁、隧道等特殊的线路条件,可在后续研究中进一步完善,将其作为计算参数或简化为约束条件纳入模型中,以更加贴近实际设计需求。

表6 其他追踪间隔时间 sTab.6 Other train headway under optimization
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
科技创新导报(2021年31期)2021-05-10
建材发展导向(2021年24期)2021-02-12
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
科学导报·科学工程与电力(2019年5期)2019-10-20
中国外汇(2019年13期)2019-10-10
数码世界(2018年5期)2018-06-04
山东工业技术(2016年15期)2016-12-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27