基于Android平台飞机罗盘校准系统软件的实现
2020-02-27 12:33常永亮霍朝晖黄晓波聂瑶佳
计算机测量与控制 2020年1期
山 寿,常永亮,霍朝晖,黄晓波,聂瑶佳
(中国飞行试验研究院,西安 710089)
0 引言
航空罗盘是指安装在各型飞机上显示飞行航向或方位基准的指示仪表,主要包括有磁罗盘、陀螺半罗盘、陀螺罗盘、陀螺磁罗盘、无线电罗盘、捷联航姿系统、激光惯性导航系统等,对于飞行人员是否能正确操纵飞机飞行,顺利完成各类训练及作战任务,避免迷航,保证飞行安全,有着重要的意义,特别飞复杂气象或夜航时,尤为重要。因此对航空罗盘的精准度要求非常高。航空罗盘及相关系统间隔一定时间将会进行精准度校准,目前,国内基本采用传统校准方法,传统的罗盘校准方法是将罗盘仪固定在机身相对平坦无磁的地方,罗盘仪校准工作人员将罗盘仪调整为0位,选定远处某点为基准点,罗盘仪校准工作人员、飞机驾驶舱校准工作人员、磁航向传感器校准工作人员、牵引飞机人员完全靠对讲机进行沟通进行逐点校准,此种校准方法技术落后,需要罗盘仪校准工作人员逐点通过对讲机指挥其他人员对比校准,此种校准方法关键在于罗盘仪校准工作人员与牵引车人员的精准配合,才能有较高的校准精度,罗盘仪校准工作人员与牵引车人员经常因一点停车经常反复沟通,罗盘校准耗时主要在反复沟通上。因此罗盘校准时间长,对参与校准的相关人员熟练程度要求高,磁罗盘校准精度、效率低下。
为了解决上述磁罗盘校准存在的技术问题,我们自行研发一套磁罗盘校准系统,由座舱显控单元、牵引车显控单元及支架、基准罗盘单元及支架等组成,配有便携式充电设备。基准罗盘单元设在飞机底部的飞机纵轴线上或平行于飞机纵轴线的位置,且其航向与飞机的航向一致;座舱显控单元设置在方便校准工作人员查看的飞机座舱内;牵引车显控单元设置在牵引车上,用于指导驾驶员校罗盘时准确牵引飞机在指定点停车。牵引车显控单元功能由“牵引车方位显控软件”实现,座舱显控单元功能由“座舱方位显控软件”实现,基准罗盘单元基于单片机硬件模块实现,相关数据以R3232的格式输出到外部无线WIFI收发器,实时将磁航向发送给WIFI模块。两部分软件都是基于Android平台开发,并在基于Android平台的平板上运行。两个软件基于WIFI无线网络进行通讯,确保座舱与牵引车协调工作。可以同时指挥牵引车司机与驾驶舱罗盘校准操作人进行的磁罗盘校准。此系统主要对磁罗盘校准、光纤捷联航姿校准、无线电罗盘校准进行校准。
1 系统硬件架构
罗盘校准设备为外场便携式校准设备,由座舱显控单元、牵引车显控单元及支架、基准罗盘单元及支架等组成,配有便携式充电设备。
基准罗盘单元设在飞机底部的飞机纵轴线上或平行于飞机纵轴线的位置,且其航向与飞机的航向一致。座舱显控单元设置在方便机务人员查看的飞机座舱内,牵引车显控单元设置在牵引车上,用于指导驾驶员校罗盘时准确牵引飞机及定点停车。
显控单元屏幕尺寸不小于7寸,具有高亮及自动亮度调节功能。3个设备之间网络通信采用WIFI来完成,其中基准罗盘单元主要发送数据至座舱显控单元,座舱显控单元主要发送数据至牵引车显控单元。硬件架构如图1所示。

图1 硬件框图
2 系统设计与实现
2.1 系统运行逻辑
系统软件通过Embarcadero RAD Studio 10.1 Berlin开发工具开发,因其能够快速地开发跨平台应用程序,得到广大移动平台开发人员的信赖。移动平台基于Android SDK24.3.3.32Bit环境,通过USB与平板真机调试。
基准罗盘单元也就是罗盘校准系统控制调节板,主要实现2种功能:
1)该系统在实验室进行计量校准时,与计量校准软件一起实现校线的生成,并将生成的校线存储在板上的EEPROM内。
2)在正常工作时,利用校线对TCM5姿态检测传感器输出的航向角进行校准,并以R3232的格式输出到外部无线WIFI收发器。
牵引车方位显控软件是牵引车上工作人员手持平板运行软件,座舱方位显控软件是飞机座舱工作人员手持平板运行软件,两个软件实现全部功能,都是基于Android平台,为了确保指令、数据100%正确接收,3个点通过TCP协议进行网络通信,基准罗盘单元实时将测定大地磁航向传给座舱显控单元,座舱显控单元再将航向角进行校准后通过网络转发给牵引车显控单元。座舱显控单元会给定一个人为设定的磁航向要求牵引车将飞机牵引到指定磁方位角度,牵引车工作人员通过软件给座舱显控软件发送到位指令,座舱操作人员接到指令后,校准相关磁罗盘。如图2所示。

图2 网络数据传输框图
2.2 软件设计与实现
座舱显控单元和牵引车显控单元开机后默认显示状态是基本罗盘画面,即显示由磁航向传感器测量的标准磁航向信息,如磁航向0°、30°等,显示的磁航向范围为0-360°,显示方式为数字磁航向信息和罗盘刻度、罗盘指针图形显示。在基本罗盘画面,设置有磁罗盘校准、光纤捷联航姿校准、无线电罗盘校准快捷按钮,用于进入相应功能画面。
牵引车方位显控软件被动接收座舱方位显控软件发来的方位指令数据,按方位度数要求牵引飞机调整到位,并发送“发送到位指令”。牵引车方位显控软件主要功能模块如图3所示。
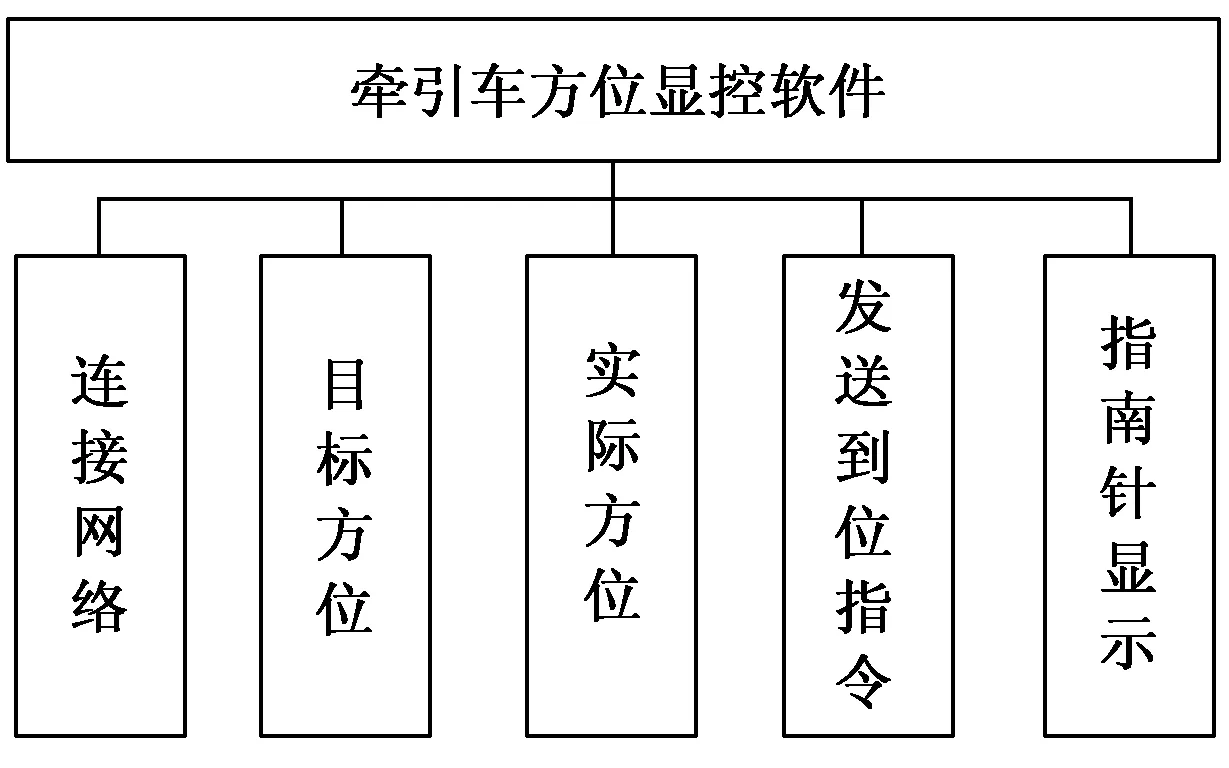
图3 牵引车方位显控软件主要功能模块
主要模块功能如下。
连接网络:通过TCP协议连接座舱方位显控软件,进行网络通信;
目标方位:是指座舱方位显控软件下发要测量的目标磁方位值;
实际方位:是指飞机现在实际磁方位值,此值根据牵引车牵引飞机磁方位的改变而改变;
指南针显示:牵引车工作人员要牵引飞机到指定的磁方位值处,指南针也会根据实际磁方位值改变。
发送到位指令:如果牵引车工作人员要牵引飞机到指定的目标方位值处后,向座舱方位显控软件发送到位指令,使座舱工作人员知道已经到位,测量确认后,可测下一个目标了。软件工作流程如图4所示。
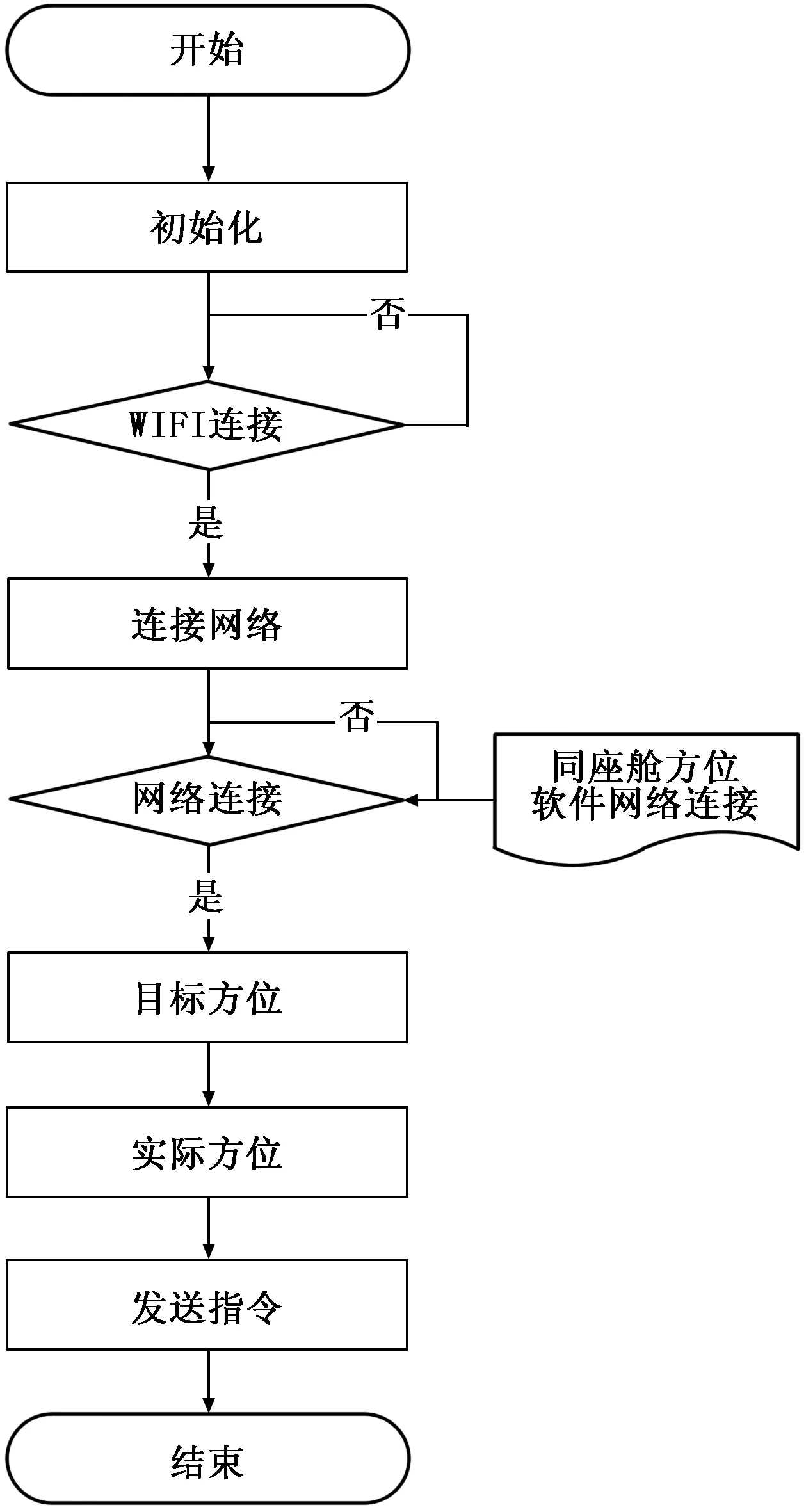
图4 牵引车方位显控软件软件流程图
软件间网络通信通过TIdTCPClient控件实现,该控件包装了一个完整的TCP客户端。该客户端包括sock支持。程序运行初始化正确后,将启动网络通信线程实时监听相关端口,如果接收到网络包信息,通过对网络包相关定义确认,正确的接收处理,不符合协议规定的抛弃。接收发送线程代码如下:
procedure TMyThread;
var
RxBuf:TIdBytes;
ReadLen:integer;
ByteBuf:array[0..3] of Byte;
begin
while MyThreadRun do {假如线程不挂起, 这个循环将一直循环下去}
begin
if MyThreadRun=False then
begin
Exit;
end;
if Form1.IdTCPClient1.Connected then
begin
try
ReadLen := Form1.IdTCPClient1.IOHandler.InputBuffer.Size;
if ReadLen > 0 then
begin
SetLength(RxBuf, 0);
Form1.IdTCPClient1.IOHandler.ReadBytes(RxBuf, SizeOf(Form1.RealTCPDatareceive), False);
BytesToRaw(&RxBuf, Form1.RealTCPDatareceive,SizeOf(Form1.RealTCPDatareceive));
if(Form1.RealTCPDatareceive.Syn1=AA) and (Form1.RealTCPDatareceive.Syn2=55) and (Form1.RealTCPDatareceive.Syn3=10) then
begin
ByteBuf[0]:=Form1.RealTCPDatareceive.Syn7;
ByteBuf[1]:=Form1.RealTCPDatareceive.Syn6;
ByteBuf[2]:=Form1.RealTCPDatareceive.Syn5;
ByteBuf[3]:=Form1.RealTCPDatareceive.Syn4;
Form1.RealTCPData:=PSingle(@ByteBuf[0])^;
end;
//机舱要求测量度数
if(Form1.RealTCPDatareceive.Syn1=BB)and (Form1.RealTCPDatareceive.Syn2=66) and (Form1.RealTCPDatareceive.Syn3=20) then
begin
ByteBuf[0]:=Form1.RealTCPDatareceive.Syn4;
ByteBuf[1]:=Form1.RealTCPDatareceive.Syn5;
ByteBuf[2]:=Form1.RealTCPDatareceive.Syn6;
ByteBuf[3]:=Form1.RealTCPDatareceive.Syn7;
Form1.RealTCPData2:=PSingle(@ByteBuf[0])^;
//ShowMessage(Format('2---%f',[Form1.RealTCPData2]));
TcpSendCmd:=0;
CommStatusCmd:=456;
if(Form1.Timer5.Enabled=False) then
Form1.Timer5.Enabled:=True;
end;
//确认指令发出命令格式
if(Form1.RealTCPDatareceive.Syn1=AB) and
(Form1.RealTCPDatareceive.Syn2=77) and
(Form1.RealTCPDatareceive.Syn3=30)then
begin
//到位指令
if(Form1.RealTCPDatareceive.Syn8=00) and (CommStatusCmd1=0) then
begin
CommStatusCmd1:=4657;
end;
//牵引车正常接收指令
if (Form1.RealTCPDatareceive.Syn8=01) then
begin
TcpSendCmd1:=0;
CommStatusCmd:=4658;
Form1.Timer5.Enabled:=True;
end;
//座舱正常接收指令
if (Form1.RealTCPDatareceive.Syn8=02) then
begin
CommStatusCmd:=4659;
end;
end;
通过对以上功能的实现,使牵引车工作人员能清晰的看到当前执行任务,确保了牵引车与座舱工作人员按工作流程顺利对各罗盘校准,软件主界面如图4所示。

图5 牵引车方位显控软件主界面
座舱方位显控软件不但肩负着航向显示功能,还是中心控制单元并指导牵引车进行相应磁方位校准。主要实现对磁罗盘、光纤捷联航姿、无线电罗盘三种飞机罗盘校准模式。软件主要功能模块如图6。

图6 座舱方位显控软件功能框图
主要模块功能如下。
连接网络:通过TCP协议连接牵引车方位显控软件与基准罗盘单元,进行网络通信;
磁罗盘校准:对磁罗盘进行磁航向逐点校准,分为半罗差调整、罗差复查两种,罗差复查有8点校准、12点校准两种;
光纤捷联航姿校准:对磁光纤捷联航姿磁航向逐点校准,有罗差调整、罗差复查两种模式,每个模式又分为8点校准、12点校准两种;
无线电罗盘校准:对无线电罗盘磁航向逐点校准,有安装差调整、象限差调整、罗差复查三种模式,其中安装差调整、罗差复查又分为8点校准、12点校准两种;
指南针显示:座舱方位显控软件界面指南针指向实际方位角,指南针也会根据实际方位值改变。
软件主界面如图7所示。

图7 座舱方位显控软件主界面
进入画面的方式是在基本罗盘校准画面按压“磁罗盘校准按钮”即可进入磁罗盘校准画面,该画面有2个功能即“半罗差调整”和“罗差复查”按钮,在罗差复查功能画面下还有“8点校准”和“12点校准”功能。在校准期间,牵引车显控单元始终同步显示座舱显控单元的显示信息。在此期间,牵引车显控单元始终同步显示座舱显控单元的显示信息。软件流程如图8所示。
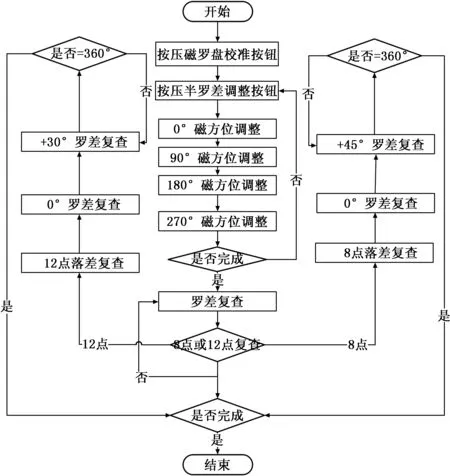
图8 磁罗盘校准流程图
光纤捷联航姿校准功能设计如图9所示,按下座舱显控单元上的“光纤航姿校准”按钮,系统立即进入初始校准画面,同时牵引车显控单元同步显示座舱显控单元信息。选择“罗差调整”,画面会显示8点校准或12点校准选择信息,如选择8点校准,系统分别按照45°间隔进行指导校准;如选择12点,系统会按照30°的间隔进行指导校准工作,选择后,系统首先指导将飞机牵引至磁方位0°进行校准工作,校准结束,按“确认键”,系统会给出信息引导牵引车司机将飞机牵引至第二个方位进行校准工作,如此反复,直至第一个循环的校准工作完成,系统返回初始画面。选择“罗差复查”,进入到第二个校准循环,画面会显示8点校准或12点校准信息,如选择8点校准,系统分别按照0°、45°、90°、135°、180°、225°、270°、315°的顺序进行校准;如选择12点校准,系统会按照30°的间隔进行指导校准工作,每次校准完成一个角度后都需要按压一次“确认”键,系统才能显示进行第二个校准点磁航向信息,以及需要转动的角度,校准完成,系统会返回初始校准画面。在此期间,牵引车显控单元始终同步显示座舱显控单元的显示信息。

图9 光纤捷联航姿校准流程图
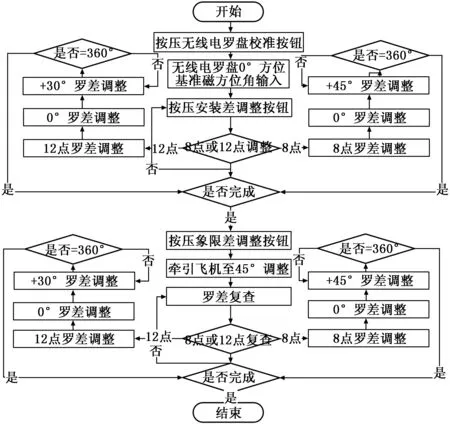
图10 无线电罗盘校准准流程图
无线电罗盘校准功能设计如图10所示,按下座舱显控单元上的“无线电罗盘校准”按钮,系统立即进入无线电罗盘校准画面,同时牵引车显控单元同步显示座舱显控单元信息。在该页面,按压“无线电0°方位基准”按钮,系统会提示输入该罗盘场的无线电0°方位时的磁方位角,输入后,系统会以此角度为0°无线电方位计算出无线电方位角,系统进入初始校准画面,显示画面会以大字号显示无线电方位,同时在旁边以小字号显示磁方位。选择“安装差调整”,画面会显示8点校准或12点校准选择信息,如选择8点校准,系统分别按照45°间隔进行指导校准;如选择12点校准,系统会按照30°的间隔进行指导校准工作。选择后,系统会发出将飞机牵引至无线电0°方位的指令,该方位校准完成后,按压“确认”键,系统会按照8点或12点校准的角度间隔发出余下的方位的校准指令,直至全部完成,第一个循环校准结束,系统返回初始校准画面;选择“象限差调整”,系统会给出将飞机牵引至45°方位,等待机务人员进行校准工作,校准结束,按压“确认”键,系统返回初始校准画面,第二个循环校准结束;选择“罗差复查”,进入到第三个校准循环,画面会显示8点校准或12点校准信息,如选择8点校准,系统会按照45°的间隔进行指导校准;如选择12点校准,系统会按照30°的间隔进行指导校准工作,系统会以当前位置依次进入下一点校准工作,如8点校准方式,系统会首先给出牵引飞机至90°方位校准信息,若为12点校准模式,系统会首先给出牵引飞机至60°方位校准信息,每次校准完成一个角度后都需要按压一次“确认键”,系统才会给出下一点校准信息,以及需要转动的角度,直至完成所有校准工作,系统返回初始校准画面。在此期间,牵引车显控单元始终同步显示座舱显控单元的显示信息。
3 校准结果与分析
3.1 校准试验
在所有的准备工作都做好之后,本文选择了在AG600水上飞机的一次罗盘校准数据,对磁罗盘、光纤捷联航姿、无线电罗盘进行校准。表1~2是8点校准与12点校准数据。

表1 8点校准数据

表2 12点校准数据
3.1 结果分析
通过对机身基准罗盘单元度数、牵引车显控单元度数、座舱显控单元度数的对比记录,确定本系统软件达到校准设备精度为不低于0.5°的要求,设备供电采用锂电池供电持续稳定。,在整个罗盘校准过程中,整个试验过程WIFI通信链路信号稳定。
通过此次磁罗盘校准试验,确定系统软件达到设计要求,在Android平台运行稳定,达到达到设计要求。
4 结语
自主设计罗盘校准系统通过一段时间的应用,对多型飞机罗盘校准都达到预期结果,特别是在AG600水上飞机的大量应用结果表明,校准设备精度不低于0.5°,设备供电采用具有充电功能锂电池供电,工作时间不小于8小时。WIFI无线通信稳定,具有自动降低复杂环境对通信干扰功能。各项技术指标达到要求。对飞机飞行安全、飞行时效、飞机罗盘精度要求越来越高的当下,我们自主研发的罗盘校准系统能够短时间对飞机上磁罗盘、光纤捷联航姿、无线电罗盘进行精确校准。此系统易于应用,对飞机罗盘校准场地要求低、操作简便、结构清晰、科技含量高。相信将来在军用、民用、无人机等领域会有广阔的应用前景。
猜你喜欢
商用汽车(2022年7期)2022-10-11
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
珠江水运(2021年21期)2021-12-03
商用汽车(2021年1期)2021-06-04
理论导刊(2021年3期)2021-03-24
——2021 年前3 季度牵引车市场特点总结分析
商用汽车(2021年10期)2021-03-02
当代陕西(2019年17期)2019-10-08
学生天地·小学低年级版(2018年5期)2018-09-13
师道(2018年6期)2018-07-16