
航空无刷直流电动机四象限PWM 驱动PI控制方法研究
2020-03-06 13:41姚叶明徐礼林
微特电机 2020年2期
姚叶明,徐礼林
(航空工业金城南京机电液压工程研究中心,南京211106)
0 引 言
无刷直流电动机(以下简称BLDCM)使用电子器件实现换相工作,避免了有刷电机中电刷与换向器的接触磨损,提高了电机的可靠性与寿命,因此在航空领域得到了广泛的应用[1]。同时,随着功率电传技术的发展,飞控作动正逐渐由液压伺服向电气伺服转变[2],这对航空BLDCM 四象限下的控制特性提出了更高的要求。驱动电路的PWM 开关控制方式以及续流回路的单向导通特性,使得BLDCM在不同象限运行时表现出不一样的控制特性,电机的驱动控制算法对其动态性能起到决定性的影响。现有文献中虽然提出了BLDCM 的多种PWM 驱动控制方法[3-5],但是大多未对电机制动工况进行讨论[6-7],硬件结构与控制算法比较复杂[8-10],难以在工程实际中运用。
无论对电机进行位置控制还是速度控制,最终都可以转化为对电机电流的控制。通过改进PWM驱动方法,使得电机在四象限运行时绕组电流都能够快速、稳定地跟随电流指令,从而提高电机在四象限工作下的动态性能。对于BLDCM,传统的PID控制方法已经能够使其在Ⅰ,Ⅲ象限(驱动模式)下有较好的控制性能,但是在Ⅱ,Ⅳ象限(制动模式)工作时,电机电流控制效果较差。为了解决上述问题,本文提出了变参数可重置的PI控制方法,通过重置PI控制器积分项来解决电机在驱动与制动模式间的转换过渡,通过变PI参数提高制动模式下电流控制的稳定性。实验数据表明,使用该方法能够提高制动工况下电机电流的控制精度,提高电机动态性能。
1 BLDCM 的PWM 驱动方法及回路分析
BLDCM 一般使用三相桥式驱动电路进行驱动。当电机运行在Ⅰ,Ⅲ象限时,使用单管调制的方法对驱动桥路进行控制,以提高电机的有效转矩[11];当电机运行在Ⅱ,Ⅳ象限时,使用双管调制的方法对驱动桥路进行控制,以避免电机相电流在反电动势作用下出现不可控的现象[12]。本文将分别对电机在Ⅰ,Ⅲ象限以及Ⅱ,Ⅳ象限运行时的驱动桥路进行分析,以得到PWM 占空比与电机相电流之间的关系。为了便于分析,进行如下假设:电机相电流变化速率远小于PWM 开关频率,即单个PWM周期始末相电流近似相等;单个PWM 周期中电机相电阻上的压降不变,即忽略PWM 调制过程中电流波动对相电阻上压降的影响;单个PWM 周期中电机绕组反电动势不变,即忽略PWM 调制过程中电机转速的波动。
1.1 Ⅰ,Ⅲ象限驱动桥路分析
电机在Ⅰ,Ⅲ象限工作时电机绕组的导通及续流回路如图1所示,图1(a)为导通回路,图1(b)为续流回路。为不失一般性,本文设定PWM 调制过程中驱动桥路下管常闭,上管进行斩波控制;电机驱动电流从B相流入,A相流出,此时绕组上反电动势的方向与电流方向相反,即由A相指向B相。当电机绕组处于导通状态时,T3 管与T2 管导通,电流从电源通过T3管流入B相绕组,从A相绕组流出后经过T2管流回电源。当电机绕组处于续流状态时,T3管关闭,T2管导通,绕组电流在其电感作用下保持流通方向不变,从A相绕组流出的电流经过T2管以及续流二极管D4后流进B相绕组形成回路。

图1 电机绕组导通及续流回路(Ⅰ,Ⅲ象限)
根据以上分析,可以写出导通和续流状态下的绕组回路电压方程:

式中:L,R分别为电机绕组相电感与相电阻;i为绕组电流;uBEF为单相绕组反电动势;u为施加在绕组上的外电压,绕组导通时,u=us/2,us为电源电压;绕组续流时,u=0。
在一个PWM 周期内对式(1)进行积分并结合本文的三点假设,可以得到如下方程:

式中:D,T分别为PWM 指令的占空比与周期。式(2)左侧与右侧分别代表每个PWM 周期中绕组电流在导通与续流过程中的变化量。根据式(2)可以得到电机工作在Ⅰ,Ⅲ象限时占空比与相电流的关系:

1.2 Ⅱ,Ⅳ象限驱动桥路分析
为了方便说明,本文仍以电机A,B绕组通流为例分析电机在Ⅱ,Ⅳ象限工作时的导通及续流通路,并假设此时电机转速方向与前面一致,转矩方向与前面相反。电机转速方向不变说明每一相反电动势的方向不变,电机转矩方向相反说明通过绕组的电流方向相反,此时电机的导通及续流通路如图2所示。
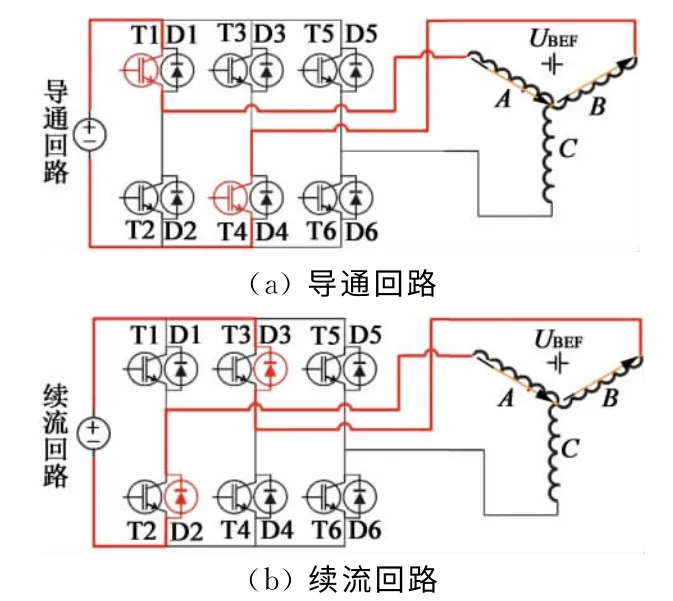
图2 电机绕组导通及续流回路(Ⅱ,Ⅳ象限)
当电机绕组处于导通状态时,T1管与T4管导通,电流从电源通过T1管流入A相绕组,从B相绕组流出后经过T4管流回电源。当电机绕组处于续流状态时,若仍进行单管调制,即只对T1管进行PWM 调制而T4管常通,电流则会在反电动势的作用下形成从续流二极管D2依次经过A相、B相至T4管的环路,而不受T1管PWM 信号的控制。为了克服上述缺点,当电机运行在Ⅱ,Ⅳ象限时需要进行双管PWM 调制。双管PWM 调制中电机绕组进行续流时,电流从电源负极经过续流二极管D2流入A相,从B相流出后经过续流二极管D3流回电源正极。
根据以上分析,可以写出Ⅱ,Ⅳ象限工作时绕组导通和续流状态下的回路电压方程:

在绕组导通过程中,施加在绕组上的外电压u=us/2,绕组续流过程中,u=-us/2。根据式(4)可以得到电机在Ⅱ,Ⅳ象限运行时电流与占空比的关系:

2 变参数可重置PI控制方法
通过上述的分析可知,PWM 调制方法有差别,当电机运行在Ⅰ,Ⅲ象限和Ⅱ,Ⅳ象限时,同样的占空比对应的电流值并不相等,而现有PWM 驱动控制中普遍使用的PI控制器由于积分环节的作用而存在一定的惯性,当电机运行象限发生变化时,控制器的输出不能立刻变化,因此在电机运行象限变化时会出现比较大的控制偏差,此时电流控制精度差,电机转矩波动大。
同时,对式(3)、式(5)进行求导,可以得到电机运行在Ⅰ,Ⅲ象限和Ⅱ,Ⅳ象限下占空比与电机电流的增益系数K13,K24:
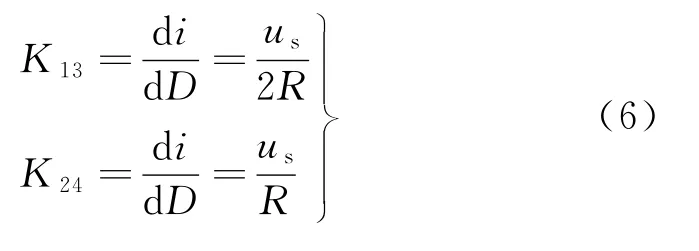
从式(6)中可以看出,K24=2K13,即Ⅱ,Ⅳ象限的占空比-电流增益是Ⅰ,Ⅲ象限的两倍,若使用基于Ⅰ,Ⅲ象限设计的PI参数对电机在Ⅱ,Ⅳ象限运行进行控制时,则有可能出现不稳定的现象。
为了克服上述缺点,本文设计了变参数可重置的PI控制器用于电机PWM 驱动控制。变参数可重置PI控制器包含两部分:驱动模式控制器和PI控制器。驱动模式控制器根据电机反馈的转速信号以及电流指令信号判断电机运行的象限,其判断逻辑可以使用如下伪代码表示:
If(转速信号*电流指令>=0)
电机驱动模式=Ⅰ,Ⅲ象限
Else
电机驱动模式=Ⅱ,Ⅳ象限
End
根据判断出的电机驱动模式,驱动模式控制器向PI控制器传递对应的比例积分系数以及积分器的重置信号与初始值。由于电机Ⅱ,Ⅳ象限运行时的占空比-电流增益是Ⅰ,Ⅲ象限的两倍,因此只需将电机Ⅱ,Ⅳ象限运行时的比例、积分系数Kp24、Ki24选为Ⅰ,Ⅲ象限运行时系数Kp13、Ki13值的一半,可保证电机在四象限运行时具有近似的控制特性,即:

此外,当驱动模式控制器计算出的电机驱动模式与上一控制周期不一致时,还需对PI控制器进行重置,重置的占空比指令初始值可根据电流指令使用式(3)、式(5)反推得到,式中每项反电动势可近似表示为电机转速的线性函数。因此,电机驱动模式转换时控制器重置的初始值可写为:

式中:Di13,Di24分别为电机转换至Ⅰ,Ⅲ象限和Ⅱ,Ⅳ象限运行时占空比指令的初始化值;icmd为电流指令;ke为电机反电动势系数;ω为电机转速。
变参数可重置PI控制器的架构如图3所示。
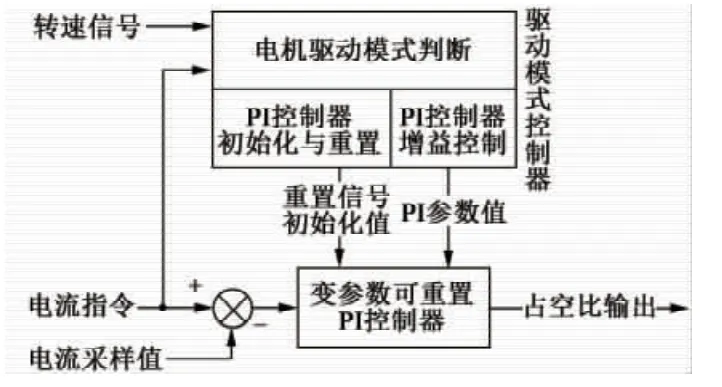
图3 变参数可重置PI控制器框图
3 实验结果与分析
本文基于英飞凌6ED100HP1-FA 驱动模块以及恒润4025FPGA 板卡,对所设计的控制器进行了实验验证。实验中电流使用莱姆LA55-P SP50电流传感器采集,电流采样频率10kHz,实验所使用的电机主要参数如表1所示。
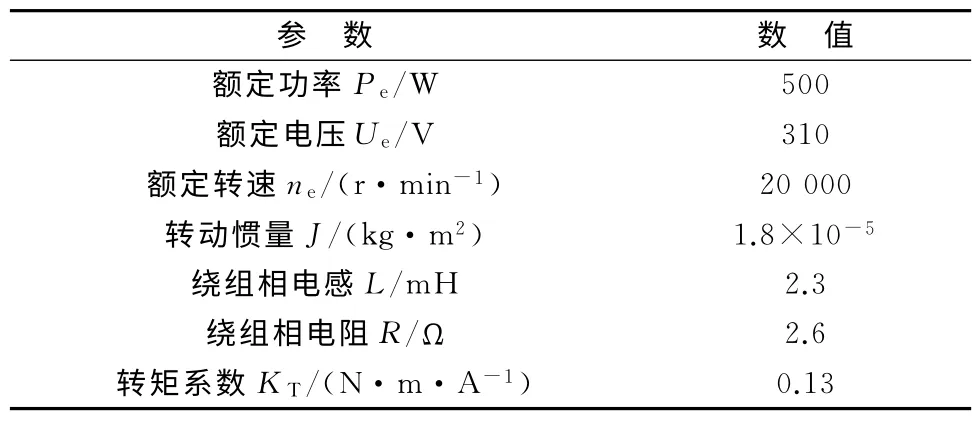
表1 实验电机主要参数
实验中,给电机施加正弦转速指令信号,信号的幅值和频率分别为12 000r/min和7 Hz。图4为普通PI控制器实验结果,图5为本文变参数可重置PI控制器实验结果。实验结果中为了便于观察,电流指令与电流采样值经过了截止频率500 Hz的低通滤波器滤波处理;PWM 占空比信号以及PWM单管/双管调制模式信号中,0 代表单管调制模式,对应电机工作在Ⅰ,Ⅲ象限时的情况,1代表双管调制模式,对应电机工作在Ⅱ,Ⅳ象限时的情况。
从图4可以看出,普通PI控制器不能根据电机运行象限的变化自动重置积分器输出,所以当电机运行象限发生变化时电机电流的控制偏差明显增大,最大偏差达到电流幅值的50%以上。电机电流的控制偏差进一步导致电机转速产生控制偏差,此时转速控制偏差最大为612r/min。当使用本文提出的变参数可重置PI控制器后(图5),即使电机运行象限发生变化,电机电流也能较好地跟随指令信号,电机转速的控制偏差小于221r/min,仅为普通PI控制器转速控制偏差的36%。此外,从图4(c)中还可以看出,当电机运行在Ⅱ,Ⅳ象限时(M=1),PWM 占空比输出有发散的趋势,这主要由于电机Ⅱ,Ⅳ象限运行时占空比-电流增益是Ⅰ,Ⅲ象限的两倍,导致系统在Ⅱ,Ⅳ象限运行时稳定性有所降低。

4 结 语
本文对航空BLDCM 在PWM 驱动下四象限运行时绕组的导通和续流过程进行了分析,并根据电机绕组的导通和续流特性设计了变参数可重置的PI控制器。通过判断电机运行象限,对PI控制器积分项进行重置与初值设定,能够有效抑制电机运行象限切换时的电流波动;同时根据电机不同象限运行时PWM 占空比-电流增益的比例,对应修改PI控制器比例与积分系数,提高了系统的稳定性。实验结果表明,使用本文提出的控制方法,可减小电机转速跟随误差64%。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
中学生数理化·高一版(2022年3期)2022-04-05
莆田学院学报(2021年5期)2021-11-13
初中生学习指导·提升版(2020年10期)2020-09-10
电脑爱好者(2020年11期)2020-07-29
电脑爱好者(2019年17期)2019-10-30
快乐作文(5.6年级)(2019年5期)2019-09-10
汽车维修与保养(2019年5期)2019-08-21
速读·下旬(2019年3期)2019-04-11
科学与财富(2017年27期)2017-10-17
