
PI Ziegler-Nichols预测控制在机器人位置伺服控制中的应用
2020-03-27 18:18巩永光
机械设计与制造 2020年3期
张 营,巩永光,田 涛
(济宁学院物理与信息工程系,山东 曲阜 273155)
1 引言
由于交流永磁同步电机励磁采用永磁体,从而有效地减小了电机的体积并降低了质量,因而交流永磁同步电机在工业机器人领域得到较广泛的应用,而工业机器人姿态变换时的位置要求对交流永磁同步电机的位置控制提出了更高的要求[1-2]。
工业自动化生产的机器人用的交流永磁同步电机具有高效率、低损耗的特点,由于电机模型的非线性,传统控制方式具有参数整定困难,控制系统稳定性和精度不高的缺点。为了克服传统控制方式的缺点,众多线性以及非线性算法在交流永磁同步电机的控制系统设计中得到广泛应用[3-5]。其中,Ziegler-Nichols控制由于实现简单,无需对特定对象建模,可实现对PI参数在线整定,因而在控制领域的到广泛应用[6-7]。
预测算法具有多步预测、滚动优化和反馈校正控制率,其具有操作控制效果好、鲁棒性强、对模型精度要求不高的优点[8-10]。将PI Ziegler-Nichols控制与预测控制算法相结合,设计PI Ziegler-Nichols预测并行位置控制器。当误差增大时,预测控制算法能够提高收敛速度,提高了闭环系统的稳定性和鲁棒性。当误差变小时,PI Ziegler-Nichols算法自调整能力使电机运行能够达到较理想的状态。
2 永磁同步电机数学模型
假设永磁同步电机磁路不饱和且忽略损耗,则永磁同步电机的数学模型可写为:
式中:ud,uq,iq,id—d-q 轴的电压及电流;L、R、ωr—电感、内阻及角速度;Ψf、pn—磁链与极对数。
3 PI Ziegler-Nichols智能预测控制器设计
3.1 PI Ziegler-Nichols控制器
PIZiegler-Nichols控制器结构设计,如图1所示。

图1 PI Ziegler-Nichols结构框图Fig.1 Structure Diagram of PI Ziegler-Nichols
图中:α—调节因子;ΔeN—经归一化的偏差变化率;eN—经归一化的偏差;k—反馈系数。ΔeN和eN可表示为:
式中:ωref—设定值;ωf—反馈值;ωref_max—最大设定值;e(k)—偏差。
由式(5)~式(7)可推出调节因子α为:

传统PI控制算法为:

式中:i(k)、Kp、Ki—输出量,比例系数及积分系数。将式(8)代入如下调整函数可得:

式中:k1、Ktp—比例调整率及校正后的比例系数—积分调整率及校正后积分系数。
根据式(10)与式(11)可得到 α 取值范围为[-1,1](闭环系统),因而PI Ziegler-Nichols控制式可写为:
2.14 标题层次 根据GB1.1-87《标准化工作导则 标准编写的基本规定》,标题层次采用阿拉伯数字连续编码,两个数字符号之间加下圆点相隔,最末数字后面不加标点。标题层次划分一般不超过4节,4节不够时,可将层次再细划分。第一级标题为 1,第二级标题为 1.1,第三级标题为 1.1.1,第四级标题为1.1.1.1。各级标题序号均顶格书写,序号后空一字空再写标题或具体内容。示例:

式中:i*(k)—控制器输出。
3.2 预测控制器
预测控制是基于模型的控制算法,预测模型具有表达系统动态行为的功能,将来针对不同的控制策略可计算出不同的输出预测轨迹,从而选择最优控制策略。使系统具有一定的性能优化。
滚动优化方法仅在每次递增时控制系统,因此开环预测模型为:

式中:Y0(K+1)—当没有Δu(k)时未来p步的预测;A—控制对象的动态矩阵。
开环预测和闭环反馈校正的预测:

式中:hi—预测误差修正系数。控制算法就是要确定一组M个控制增量,即:

滚动优化函数取为:

趋于最小。其中,Q—预测输出误差加权阵;R—空指针增加权阵;Q≥0,R≥0。在实施过程中,仅将 Δu(k)施加于系统,令:

式中:A—P*M模型矩阵;M—控制时长度;P—预测时长最大值。dT点积计算公式为:

由以上的分析可推出PI Ziegler-Nichols预测控制器,如图2所示。

图2 PI Ziegler-Nichols预测控制器结构图Fig.2 Structure Diagram of PI Ziegler-Nichols Predictive Controller
4 仿真分析
对PID控制器和PI Ziegler-Nichols预测并行控制器进行设计。主要参数如下:J=2.77×10-3kg·m2;摩擦力矩为 4.79N·m;动态力矩为 12N·m,Kt=2.05 N·m/A;B=1.43×10-4N·m·s;Ra=2.6Ω;Ld=Lq=6.65×10-3H;Ie=7.3A;Imax=12.8A;Pn=4;预测控制器参数取:N=100,M=4,P=100,Q=I(I为单位阵),R=0.2I,h=0.9;PI Ziegler-Nichols控制器参数为:Kp=12,Ki=1.3,k1=1.6,k2=3.4,α=0.7。偏差设定值为0.9。
4.1 施加负载扰动
假定在负载施加常量阶跃干扰,该干扰常量为15N·m,施加时间第2s,则扰动曲线,如图3、图4所示。由扰动响应变化曲线可知,PID控制器当2s处负载发生干扰时,其曲线响应有较大偏离,需较长时间重新达到稳定。与之相比设计的PI Ziegler-Nichols预测控制器,系统抗干扰能力强。
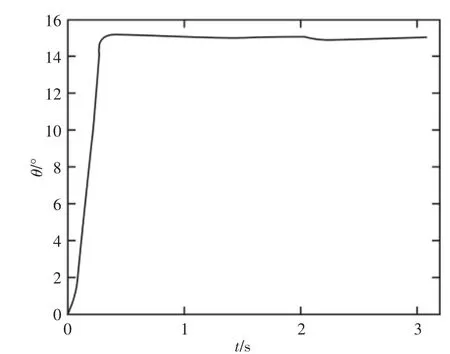
图3 PI Ziegler-Nichols预测控制响应曲线Fig.3 Response Curve of PI Ziegler-Nichols Predictive Control
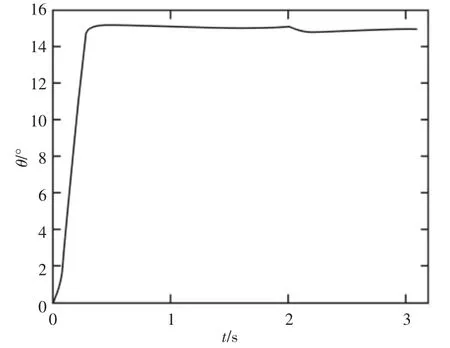
图4 传统PID控制响应曲线Fig.4 Response Curve of Traditional PID Control
4.2 电机参量变化
假定系统的转动惯量变大6倍,其控制响应曲线,如图5、图6所示。对比图中曲线的变化波形可知,PI Ziegler-Nichols预测控制器响应曲线更为平稳,变化较小。

图5 电机参数变化时PI Ziegler-Nichols预测控制响应曲线Fig.5 Response Curve of PI Ziegler-Nichols Predictive Control When Motor Parameters Change
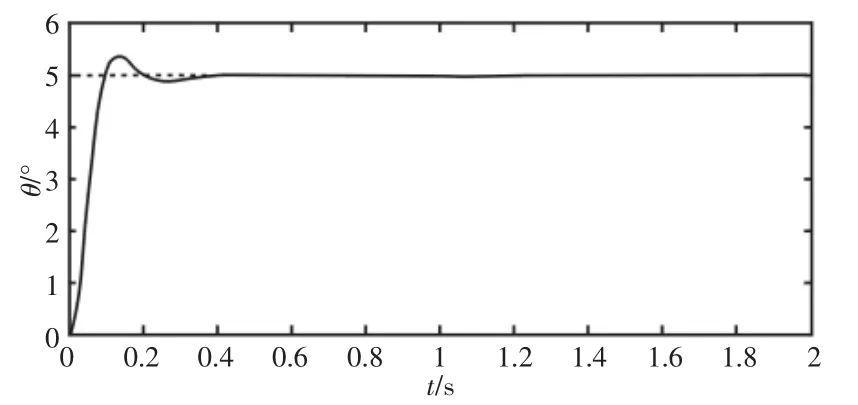
图6 电机参数变化时传统PID控制响应曲线Fig.6 Response Curve of Traditional PID Control When Motor Parameters Change
4.3 正弦跟踪实验
设定正弦跟踪函数为:15sin(0.8766t),则正弦跟踪函数的误差曲线,如图7、图8所示。由图中误差曲线波形可知,PI Ziegler-Nichols预测控制器跟踪误差小,跟踪性能更好。

图7 PI Ziegler-Nichols预测控制误差曲线Fig.7 Error Curve of PI Ziegler-Nichols Predictive Control
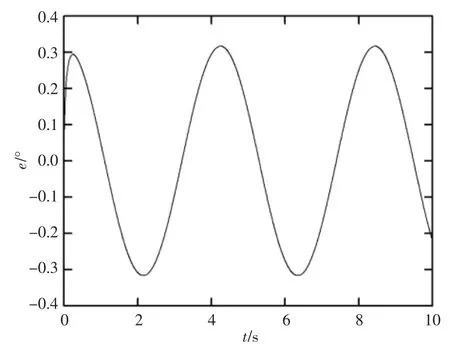
图8 传统PID控制时的误差曲线Fig.8 Error Curve of Traditional PID Control
5 结论
针对机器人姿态变换时永磁电机伺服系统的负载变化等特点,提出了PI Ziegler-Nichols预测控制策略。通过PI Ziegler-Nichols的自调整进行控制参数调节,适应系统位置变化。针对误差值较大的现象,设计的预测控制算法可使系统误差以较快速度收敛,从而实现PI Ziegler-Nichols的自调整及调节。仿真分析证明,当系统参量产生变化时,PI Ziegler-Nichols预测控制算法可进行适应调整,在机器人伺服系统中应用时,可实现较好的位置控制精度和较快的响应速度。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
上海建材(2019年3期)2019-09-18
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
组合机床与自动化加工技术(2014年12期)2014-03-01
