社区不同跌倒风险老年人跨越障碍的步态运动学特征分析
2020-03-28 03:29孟站领张庆来刘昌亚
中国康复理论与实践 2020年1期
孟站领,张庆来,刘昌亚
1.郑州大学体育学院,河南郑州市 450044;2.苏州大学体育学院,江苏苏州市 215000
预计到2050年,中国老年人口将占全国总人口的25%,超过4亿[1‐2]。人口老龄化备受关注。《“健康中国2030”规划纲要》特别提出促进健康老龄化的问题,强调对老年人的健康指导与干预;指出推动形成体医结合的疾病管理与健康服务模式,开展运动风险评估[3]。
70%跌倒与老年人死亡相关[4‐6],约50%老年人跌倒是因为没能很好通过地面上的突起物或障碍物[1,7‐8]。步态是人体结构与功能、运动调节系统等在行走时的外在表现。四肢、躯干、神经调节系统和运动平衡能力都会影响步态[9‐12]。步态分析利用生物力学的理论和方法,结合人体解剖、生理等知识,对人体行走功能进行运动学和动力学综合研究[13‐14]。老年人跌倒与老年人跨越障碍物时的步态异常直接相关[15‐17]。研究老年人跨越障碍的步态稳定性,对老年人跌倒的预防具有重要意义。
1 对象与方法
1.1 研究对象
2016年7 月至9 月,应用随机整群抽样方法,抽取某市1 个社区和1 个老年公寓中年龄≥60 岁的老年人。
纳入标准:①无语言和认知障碍,能够完全理解测试要求,并独立完成各项测试工作;②知情同意并自愿参加测试;③无明显足部畸形、下肢疾患和严重外伤史,能独立行走。
排除标准:①有明显影响步行和姿势控制方面的疾病;②正在服用神经松弛剂或支气管扩张剂等影响姿势控制能力的药物。
最终入选27例,其中男性15例,女性12例。均签署知情同意书。
本研究经郑州大学伦理委员会审查批准〔No.[郑体]伦审字(2019002)〕
1.2 跌倒风险分组
参照Shumway‐Cook 等[18]提出的标准,以计时起立‐行走测试(Timed Up and Go Test,TUGT)时间13.5 s为高跌倒风险界值,12 s 作为低跌倒风险界值。参照Bohannon[19]提出的标准,以5 次坐立测试(Five Times Sit to Stand Test,FTSST)时间14.8 s 为高跌倒风险界值,11.4 s为低跌倒风险界值。
受试者均完成TUGT[18,20]和FTSST[19]测试,测试3次,取平均值。按照同时满足两种跌倒风险标准的原则,将受试者分为高跌倒风险组(H 组)和低跌倒风险组(L 组),其中H 组15例,男性7例,女性8例;L 组12例,男性8例,女性4例。两组TUGT 和FTSST 成绩有非常高度显著性差异。见表1。

表1 两组TUGT和FTSST结果比较(s)
1.3 跨越障碍步态测试
采用两台DCR‐VX2100E 摄录一体机(日本SONY公司)拍摄老年人跨越障碍时的三维运动录像,摄像机至测力板中心距离约10 m,主光轴夹角90°,机高1.2 m,拍摄频率50 Hz;比例尺采用爱捷001‐A 三维DLT 立体辐射框架,以框架中“23”球中心指向“13”球中心的连线为X 方向,保持X 方向与行走方向平行。陈岩等[21]提出,障碍物高度15 cm 与现实生活中跨越台阶高度最符,故采用15×10×80 cm 的泡沫板作为障碍物。采用运动录像分析系统Ariel Perfor‐mance Analysis System(美国ARIEL DYNAMICS 公司)对录像进行逐帧逐点解析,采用Dempster模型,经过数字化转换,获取各关节的位移、角度、速度、加速度等运动学参数;采用数字滤波进行数据优化,截断频率6 Hz。
1.4 统计学分析
采用SPSS 19.0 进行统计分析。以给定置信水平下可接受的边际误差进行样本容量估计。所有结果以()表示,组间比较采用独立样本t检验,组内比较采用配对t检验。显著性水平α1=0.05,非常显著性水平α2=0.01。
2 结果
2.1 时间特征
H 组跨越腿摆动时间高于L 组(P<0.05),摆动腿摆动时间也有高于L 组的趋势,但无显著性差异(P>0.05),H组跨越障碍总时间高于L 组(P<0.05)。见表2。

表2 老年人跨越障碍的时间特征(s)
2.2 空间特征
2.2.1 位移参数
H 组身高标准化的最大质心高度小于L 组(P<0.05)。H 组身高标准化的跨越步长、跨越腿摆动净高度和摆动腿摆动净高度有小于L 组的趋势,但无显著性差异(P>0.05)。见表3。

表3 老年人跨越障碍的位移参数(/身高)
2.2.2 关节角度
在跨越腿位于障碍正上方时,H 组跨越腿膝关节角度大于L 组(P<0.05);在摆动腿位于障碍正上方时,摆动腿膝关节角度大于L 组(P<0.05)。两腿髋关节和踝关节角度均无显著性差异(P>0.05)。组内比较,H 组摆动腿髋关节角度显著大于跨越腿(P<0.001),踝关节角度明显大于跨越腿(P<0.01);L 组摆动腿髋关节角度显著大于跨越腿(P<0.001),膝关节角度明显小于跨越腿(P<0.05),踝关节角度显著大于跨越腿(P<0.001)。见表4。
2.3 时空特征
2.3.1 速度
在跨越腿位于障碍正上方时,H 组跨越腿髋关节速度小于L 组(P<0.05)。摆动腿在位于障碍最上方时,各关节和质心速度均无显著性差异(P>0.05)。组内比较,H 组摆动腿髋关节速度显著大于跨越腿(P<0.001),膝关节速度显著大于跨越腿(P<0.001),摆动腿位于障碍正上方时质心速度大于跨越腿位于障碍正上方时(P<0.05);L 组摆动腿髋关节速度显著大于跨越腿(P<0.01),膝关节速度显著大于跨越腿(P<0.001),摆动腿位于障碍正上方时质心速度明显大于跨越腿位于障碍正上方时(P<0.01)。见表5。

表4 位于障碍正上方时跨越腿和摆动腿髋、膝、踝关节的角度特征(°)
2.3.2 加速度
摆动腿处于障碍物正上方时,H 组踝关节加速度低于L 组(P<0.05),其他关节和质心加速度两组间无显著性差异(P>0.05)。组内比较,跨越腿和摆动腿各关节和质心加速度均无显著性差异(P>0.05)。见表6。
3 讨论
TUGT 侧重于测试老年人平衡和移动能力,FTSST 侧重于测试老年人下肢肌力和平衡控制能力。同时对老年人进行TUGT 和FTSST 测试,能够较为准确地区分老年人跌倒风险。
不同跌倒风险老年人在跨越障碍的时间特征方面存在一定差异。高跌倒风险老年人在跨越障碍时动作更缓慢,起跨动作不果断,跨越障碍的信心相对不足。当步行速度降低时,站立相延长,摆动相相对稳定,双腿支撑时间明显增加[23‐24]。步行周期约1.1 s时,双腿支撑相占步行周期25%;当步行周期增加至约2.5 s 时,双腿支撑相约占50%;若步行周期缓慢增加,由于速度下降,单腿支撑时间和步长延长,姿势的稳定性下降[25‐26]。Chen 等[27]发现,老年人在开始迈出躲避障碍物的那一步之前,就对步态模式做出了调整,他们用更保守的策略跨过障碍物,表现为接近障碍物时速度更慢,步伐更小。
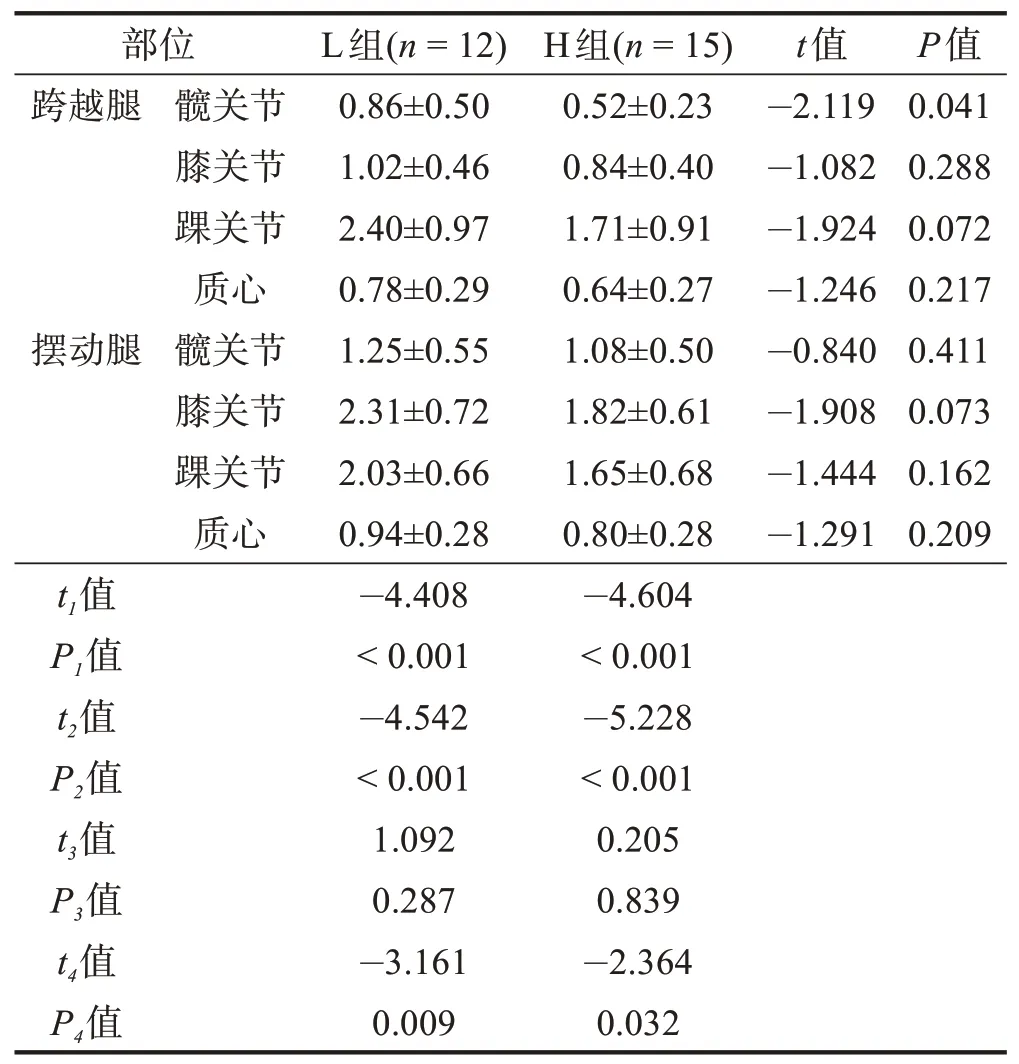
表5 位于障碍正上方时跨越腿和摆动腿髋、膝、踝关节和质心速度(m/s)

表6 位于障碍正上方时跨越腿和摆动腿髋、膝、踝关节和质心加速度(m/s2)
H 组身高标准化的最大质心高度下降,说明高跌倒风险老年人在跨越障碍时,由于下肢肌力下降,整体做功能力下降。Saunders 等[28]提出,减少质心垂直位移可降低步行中的能量消耗,保持人体动力学顺畅的机械转移。人跨越障碍物时,对平衡控制的需求增加。Chou 等[29]发现,受试者跨过相当其身高2.5%~15%障碍物时,前后方向和垂直方向有较大范围的质心运动,同时伴随质心和压力中心前后方向的位移。健康个体侧方质心位移较小,多可保持质心在安全极限内;而平衡受损的老年人在控制中有更多困难[30]。一旦对质心平衡调控不当,极易导致跌倒[31]。
H 组老年人,跨越腿和摆动腿在位于障碍正上方时,膝关节角度增大,提示高跌倒风险老年人相关肌肉和关节柔韧性可能有一定衰退,摆动高度降低,膝关节角度增大[32‐33]。膝关节屈曲将有效提高步态的协调性,在跨越障碍时,站立相屈膝可使质心在垂直方向上的运动变得更加平缓,摆动相屈膝使摆动侧肢体的垂直距离变短,有助于足的廓清。踝关节对跨越障碍步态变缓也很重要,站立相踝关节跖屈将使每步转移变平缓,并可影响摆动侧肢体初始速度[34‐35]。老年人在跨越障碍时,摆动腿髋关节和踝关节角度增大,以增加摆动腿和脚的高度,避免发生绊倒。
摆动腿处于障碍物正上方时,L 组踝关节加速度高于H 组。Winter 等[36]指出,头‐上肢‐躯干环节的动态平衡由髋关节周围肌肉控制,几乎不涉及踝,这与站立平衡主要依赖踝关节控制截然不同。高跌倒风险老年人摆动腿踝关节加速能力减弱,在跨越或躲避障碍物时,可能容易造成跟随脚拖拉,碰到障碍物发生绊倒。
总之,本研究显示,高跌倒风险老年人跨越障碍时间延长,质心高度降低,是下肢肌力不足,身体平衡和做功能力下降的表现;质心位移减小可能是机体的一种代偿反应。高跌倒风险老年人跨越腿和摆动腿的膝关节角度均增大,可能与完成摆动动作的相关肌肉及关节柔韧性出现一定衰退有关;老年人在完成跨越障碍动作中,均表现出跨越腿髋、踝关节角度小于摆动腿的现象,摆动腿髋、踝关节角度增大,可适当增加摆动腿和脚的高度,避免发生磕绊。高跌倒风险老年人跨越障碍过程中,跨越腿髋关节移动速度和摆动腿踝关节加速度减小,提示肌力下降,易导致质心侧移,可增大绊倒风险。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
汽车实用技术(2017年20期)2017-10-24
航天器工程(2014年5期)2014-03-11