多弹协同拦截制导律设计*
2020-03-29 13:59肖念远王晓芳
弹箭与制导学报 2020年6期
肖念远,王晓芳,周 健
(1 北京理工大学宇航学院,北京 100081; 2 西安现代控制技术研究所,西安 710065)
0 引言
近年来,空战武器和一体化防空系统飞速发展,战场形式日益立体化、复杂化[1]。无人战机作为重要军事目标,配备多层次防御体系必要且紧迫[2]。传统空中防御措施有被动防御(即机动躲避)、主动防御(即释放红外干扰弹等)[3]。防御弹机动性能和毁伤能力受限,仅靠单枚弹难拦截敌方袭击,使得防御可靠性下降。
运用先进技术,无人战机发射多枚防御弹主动防御,组成协同防御系统,能更有效的拦截[4]。设计满足需求、适应战场环境的协同拦截制导律,成了制导技术的研究热点。协同拦截制导律的主要研究对象有我方目标(无人战机)、一枚或多枚防御弹、敌方来袭弹。针对目标、来袭弹、防御弹的“三体”[5]问题,一般作为两个并行制导问题,即来袭弹攻击目标、防御弹拦截来袭弹[6-7]。文献[8-9]研究了多枚导弹拦截来袭弹,但所需过载较大。一般情况下,来袭弹机动性能大于防御弹机动性能,存在脱靶量大,拦截失败的可能。文献[10-13]提出了不同种类的协同拦截制导律,但建立在线性化基础上,需预估剩余飞行时间,且拦截的多为静止目标,不满足现代战争需求。
文中针对该情景,提供一种新的协同拦截思路。建立非线性运动方程组,基于极小值原理和动态逆理论设计两种制导律,让无人战机顺序发射两枚防御弹,防御弹DA与无人战机采用最优协同制导律OCGL,防御弹DB采用时间协同制导律TCGL,以减小防御弹DA的过载需求,实现两枚防御弹同时拦截来袭弹,对防御弹发射间隔进行优化,使防御弹DB的拦截能量小且和DA打中M的拦截间隔相差小。
1 问题描述
假设来袭弹、目标(无人战机)、防御弹在铅垂面内运动,如图1所示。

图1 来袭弹-防御弹-目标相对运动示意图
图中,OXY为惯性坐标系,M、T、Di(i=A, B)分别为来袭弹、目标、目标发射的防御弹。Vj、aj、θj(j=M,T,Di)分别表示速度、垂直于速度矢量的加速度和弹道倾角。rMDi和rMT表示M与DA、DB、T之间的距离,qMDi和qMT为对应的视线角。uj为加速度矢量在垂直于视线方向的分量,u′MDi为M加速度在垂直于M-Di视线方向的分量。
M、Di和T的相对运动方程组为:
(1)
设M采用增强比例导引[14](APN),则
(2)
式中,KM为M的制导系数。
2 协同拦截制导律设计
T顺序发射DA和DB,T与DA以OCGL飞行,T协同,吸引M飞向DA,DA以小过载拦截M。基于动态逆理论[15-16],令DB以TCGL飞行,DB-M弹目距离与DA-M趋于一致,与DA同时拦截M。
2.1 非线性OCGL设计
由式(1)可知DA与M相对运动方程组为:
(3)
对式(3)求导得:
(4)

(5)
(6)
由图1可知,u′M与uM之间的转换关系为:
(7)
式(7)代入式(6)可得状态方程为:
(8)

(9)
式(9)中,t1、tf为DA的发射和终止时刻,终端指标和动态指标的权重系数分别为a、b、c,有a≥0,b≥0,c≥0。
由性能函数和状态方程得汉密尔顿方程:
(10)
式中,λ为协态量,正则方程和横截条件为:
(11)
由极小值原理可知:
(12)
联立可得最优控制的开环解为:
(13)
将式(13)代回状态方程积分化简可得:
(14)
将式(14)代入式(13),得到采用OCGL的DA和T控制指令的闭环解。
2.2 多防御弹TCGL设计
T发射DA后,再发射DB,DB与DA同时命中M。基于动态逆理论,rMDB与rMDA趋于一致,可实现DA和DB的拦截时间协同。
定义弹目距离跟踪误差为:
(15)
对式(15)求导可得:
(16)
令实际速度前置角ηDB=qMDB-θDB。基于动态逆理论,设计期望速度前置角ηc为:
(17)
式中,Kr>0为衰减系数。当ηDB=ηc后,联立式(16)和式(17)得,呈指数衰减,DB的弹目距离趋于实现时间协同。
令E=cosηc,反解ηc为:
(18)
式中:η0为DB的初始速度前置角;ηmax为DB的最大速度前置角。
由于ηDB=qMDB-θDB,求导可得:
(19)
基于动态逆理论设计θDB为:
(20)
式中Kη>0,为衰减系数。
为保证制导精确,考虑DB的导引头识别距离、制导时间等因素的影响,令DB与M的弹目距离为Δr1时,转入APN为:
(21)
式中,KDB为APN系数。
3 发射时间优化设计
受发射技术和战场环境制约,DB无法与DA同时刻发射,假设T先发射DA,再发射DB。由于DB末制导转APN,故DA、DB到达M的时间有误差,通过文化算法计算两枚防御弹发射间隔的最优解,使拦截间隔和DB能量小。
令DA发射时间为t1,DB发射时间为t2,发射间隔为Δt1=t2-t1,优化函数为:
(22)
式中:|Δt2|为DA和DB拦截M的时间差;为DB的控制能量;相应权重d>0,e>0。
设计变量Δt1的边界约束条件为:
Xmax=Δt1,max,Xmin=Δt1,min
(23)
式中,Δt1,max和Δt1,min为DB发射时间上下限,由战场形势与技术能力决定,故优化模型的可行域为:
Ω=[Xmin,Xmax]
(24)
令过载需要满足的过程约束为:
gj(X)=|nj|-njmax≤0,j=M,T,DA,DB
(25)
式中:nj为需用过载;njmax为可用过载。
综上分析,发射间隔优化模型为:
(26)
优化模型建立之后,即用文化算法进行优化,得到Δt1的最优解,进而得到DB的发射时间t2=t1+Δt1。
4 仿真分析
4.1 OCGL仿真结果及分析
设t1=0,KM=4,a=1010,b=0.1,c=1。其余条件见表1,仿真结果如图2~图4所示。
表1 OCGL仿真初始条件

图2 OCGL弹道图
图3 OCGL过载随时间变化图

图4 OCGL视线角速度随时间变化图
由图2知,在OCGL导引下,T向y轴负方向飞行,引诱M飞向DA。由图3知,机动能力小的T和DA,成功拦截过载较大的M。图4所示视线角速度均趋于零,表示OCGL实现对视线角速度的控制。该组结果证明OCGL可以实现低过载防御弹对高过载来袭弹的拦截。
4.2 TCGL仿真结果及分析
在表1的基础上,令t2=0.5 s,VDB=320 m/s,KMDB=4,Kη=5,Kr=1,ηmax=30°,Δr1=700 m,ηDBmax=20。仿真结果如图5~图8所示。

图5 TCGL弹道图
图6 DA和DB的弹目距离差随时间变化图

图7 DB速度前置角变化图

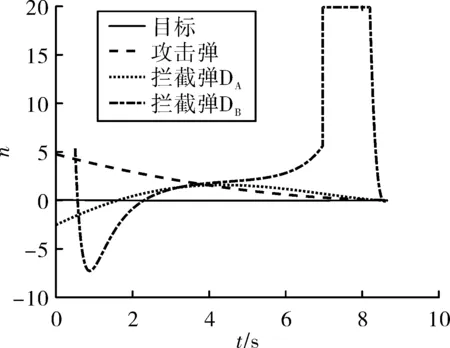
图8 TCGL过载变化图
4.3 Δt1优化结果及分析
结合上面分析,对Δt1进行优化。令d=0.01,e=1 000。设置经过20代迭代,每代10次寻优。边界约束条件为:0.1 s≤Δt1≤5 s。其余仿真参数同上。
设计不同情形以研究Δt1的影响,场景2为d=0.01,e=0.01;场景3为d=0.001,e=1 000,场景2、3与前述场景1,即d=0.01,e=1 000,优化结果对比如表2所示。

表2 3种场景下的优化结果
对比场景1和场景2,当e减小时,DB付出的能量相对于场景1减小2%。由场景1和场景3可知,当d减小时,|Δt2|=0 s,两枚防御弹同时拦截M,参数d的改变对于整体结果影响较小,是由于Δt2较小,对于结果影响相对较小导致的。在该场景下,选取发射时间间隔为2.3 s左右即可实现最优。改变优化参数对于结果的选取影响不大,从侧面证明了TCGL的适应性和参数的合理性。
5 结论
提出了一种新的协同防御策略。无人战机顺序发射两枚防御弹,设计OCGL和TCGL拦截来袭弹,优化防御弹发射间隔,针对不同场景得到对应最优解。证明了OCGL拦截来袭弹的过载优势,TCGL可实现两枚防御弹同时拦截来袭弹,组合使用能增加对来袭弹的毁伤力度。
猜你喜欢
小哥白尼(军事科学)(2022年4期)2022-07-08
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
小学生学习指导(低年级)(2019年3期)2019-04-22
兵器知识(2018年2期)2018-02-08
环球时报(2018-02-05)2018-02-05
读写算·小学低年级(2014年4期)2014-07-24
小雪花·成长指南(2009年10期)2009-12-04
棋艺(2001年17期)2001-01-06