基于事件触发的量化跟踪控制器设计
2020-04-09 02:51李严鹏
杭州电子科技大学学报(自然科学版) 2020年1期
章 淳,石 厅,李严鹏
(杭州电子科技大学自动化学院,浙江 杭州 310018)
0 引 言
网络控制系统(Networked Control System, NCSs)是一类通过网络形成闭环反馈的控制系统。相比传统控制系统,NCSs具有成本低、易扩展、可实现资源共享等优点,使其成为国内外学术界的研究热点[1]。但是,数据丢包、带宽受限等问题对NCSs的控制性能有很大影响。针对带宽受限问题,通过引入事件触发机制来减少信息传送次数,以降低带宽占用。例如:文献[2]研究网络控制系统中事件触发与带宽调度的协调问题。文献[3-4]研究多种针对状态反馈控制器的事件触发机制。文献[5]针对有干扰的线性系统,研究事件触发机制和状态反馈控制以及输出反馈控制问题。然而,NCSs作为一类离散数字控制系统通常需要采用量化器,上述研究未考虑NCSs的量化问题。针对NCSs的量化问题,文献[6-7]采用静态量化器,研究网络控制系统下事件触发机制与控制增益协同设计的问题。
跟踪控制作为控制系统研究的一个重要方向,一直是研究的热点[8]。但是,在NCSs下研究镇定问题较多,跟踪问题很少。文献[9]针对带有扰动的网络控制系统,设计了使系统有界稳定的H∞输出跟踪控制器。文献[10]在文献[9]的基础上,设计了使系统具有H∞性能指标的事件触发条件和输出跟踪控制器。以上研究仅考虑保证系统稳定跟踪的跟踪控制问题,为进一步提高NCSs的综合性能以及系统的跟踪控制性能,本文在已有研究的基础上,研究基于事件触发和量化的跟踪控制方法。主要针对NCS的跟踪控制问题,提出一种结合事件触发机制和量化控制的设计方法。
1 问题描述
被控对象是一个离散时间线性系统:
(1)
式中,x(k)∈Rn,u(k)∈Rm,y(k)∈Rp分别为被控对象的状态变量、控制输入、控制输出。A∈Rn×n,B∈Rn×m,C∈Rp×n均为系统的参数矩阵。参考系统描述如下:
(2)
式中,xr(k)∈Rq和yr(k)∈Rp分别为参考系统的状态向量和输出向量;Ar,Cr为参考模型的参数矩阵。本文目的是设计控制器使系统(1)的输出y(k)跟踪参考信号yr(k)。
本文研究的网络控制系统如图1所示。

图1 事件触发下的量化跟踪控制系统结构图


(3)
(4)

(5)
定义误差变量e(k)为:
e(k)(k)-ξ(k),k∈{k,k+1,…,k-1},∈N
(6)
在k时刻触发事件,误差变量e(k)=0。通过式(5)和式(6)可得:
(7)
(8)

(9)
式(9)改写为:
(10)
式中,Λf(k)=diag{1+Δ1(k),1+Δ2(k),…,1+Δn(k)},Δi(k)∈{-δ,δ},i∈1,2,…,n。
为了让y(k)以期望的跟踪性能跟踪参考信号yr(k),构造状态反馈控制器:

(11)


(12)
联立式(1)、式(2)和式(12),得到以下增广闭环系统:
(13)

为了优化控制性能,选取如下二次性能指标函数:
(14)
式中,Q∈Rp×p,R∈Rm×m,且均是正定对称矩阵。本文设计的目的进一步描述为:设计控制器(11),使网络控制系统(1)跟踪参考系统(2),并且使二次性能指标函数(14)的性能最优化。
2 主要结果
对闭环系统(13)进行分析,构建Lyapunov函数V(k)=ξT(k)Pξ(k)。其中,P∈R(n+q)×(n+q)为对称正定矩阵。通过解决以下优化问题来解决问题1。

(15)
满足条件:
(16)

定理1对于闭环系统(13),给定触发参数σ∈R+,量化密度ρ,权重矩阵Q∈Rn×n,R∈Rm×m。若存在正定矩阵S∈R(n+q)×(n+q),M∈R(n+q)×(n+q),W∈R(n+q)×(n+q),矩阵V∈Rm×(n+q)使得以下问题有解:
(17)
满足条件:
(18)

(19)
则问题1中的状态反馈增益以及事件触发条件矩阵分别为K=VS-1,Π=W-1。
证明对Lyapunov函数进行差分计算:

(20)

对式(20)使用定义1,得到:
(21)
对于Π>0,存在(P-1-Π-1)TΠ(P-1-Π-1)≥0,其等价于
-P-1ΠP-1≤-2P-1+Π-1
(22)
对矩阵(21)前乘和后乘矩阵diag{P-1,P-1,I,I,I,I},并结合式(22)得到:
(23)
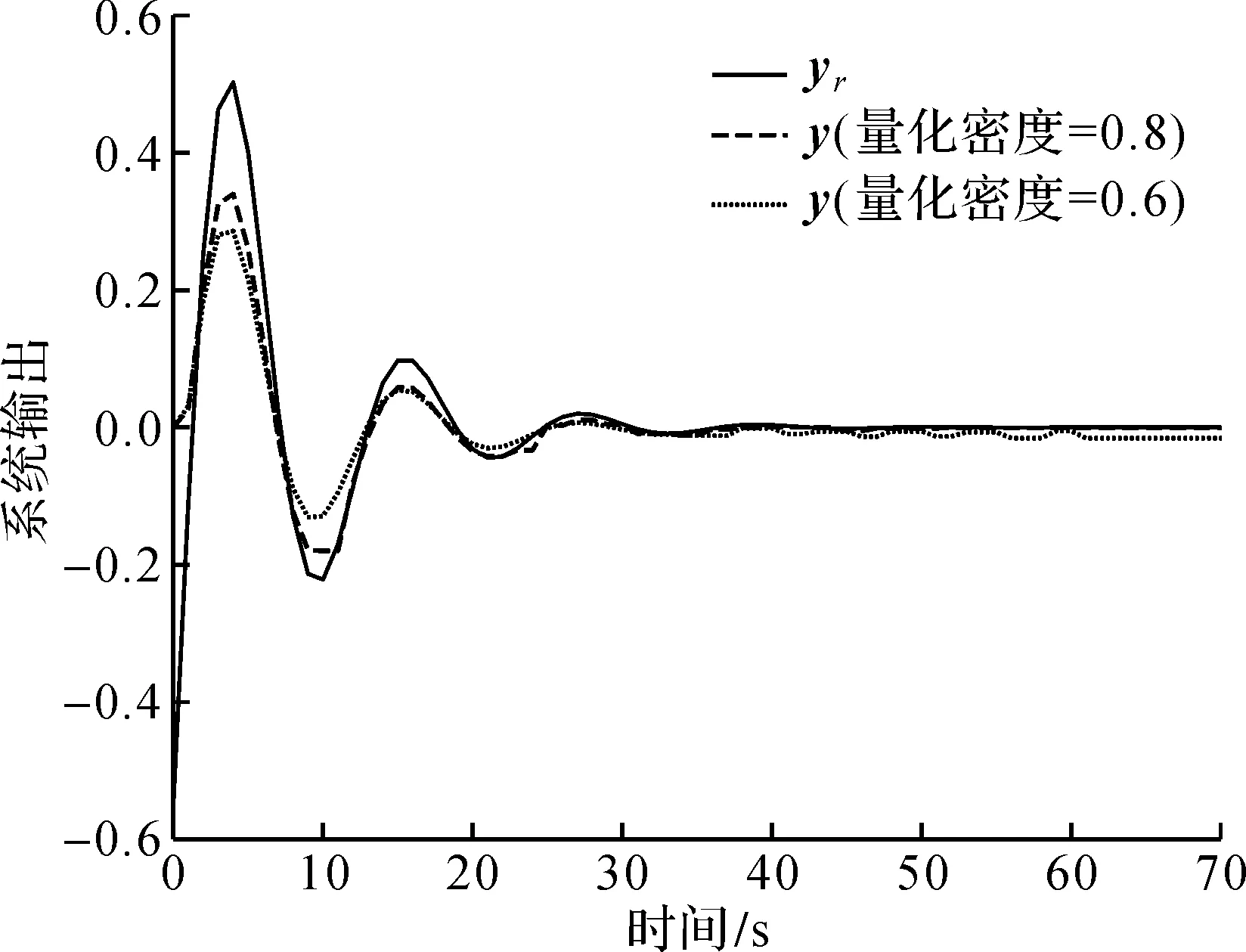
将P-1=S,KP-1=V,Π-1=W代入式(23)可得式(18),对线性矩阵不等式(19)使用定义1得P 本文中的参考信号由参考系统(2)产生,定理1为系统(1)能实现跟踪参考信号的充分条件。即当参考系统(2)与系统(1)得到的闭环系统(13)满足条件(17)并有解时,参考系统(2)产生的参考信号就能被系统(1)跟踪。证毕。 通过一个数值仿真对定理1的有效性进行验证。选取控制系统为: (24) 跟踪参考模型为: (25) 表1 不同ρ和σ下的Revent和trace(M) 从表1可以看出:随着σ增大,Revent会变小,trace(M)会变大;量化密度ρ增大时,Revent和trace(M)均会相对增大。 其次,研究量化密度和触发参数对系统跟踪性能的影响,结果如图2和图3所示。 图2 不同触发参数下的跟踪输出 图3 不同量化密度下的系统跟踪输出 表2 不同方法下,系统传输率与最大跟踪误差比较 图2中,触发参数越小,系统的跟踪误差越小,跟踪速度越快。图3中,量化密度越大,跟踪误差越小,跟踪效果越好。取量化密度ρ=0.8,触发参数σ=0.1,将本文结果与文献[9-10]进行比较,结果如表2所示。 由表2可以看出:本文结合事件触发与量化器的设计方法,相比文献[9],显著提高了传输率以及带宽利用率;相比文献[10],本文有效减少了触发次数,提高了带宽利用率,并减小跟踪误差,对跟踪性能有一定改进。 综上所述,当触发参数变小时,触发次数增多,系统状态量的更新次数增多且接近所跟踪系统的状态量,跟踪到参考系统的相应更快,因此,系统的跟踪性能更好;当量化密度变大时,量化误差变小,量化精度越高,系统状态量更接近所跟踪系统的状态量,跟踪误差更小,系统的跟踪性能更好。但是,在改变触发参数以及量化密度提高跟踪效果的同时,会影响系统的性能水平和通信率。因此,需选取合适的量化密度和触发参数,在有较好的跟踪控制效果的同时,使系统的传输率Revent和稳定时的控制性能trace(P)达到平衡。 本文通过结合事件触发与量化器,研究网络控制系统下跟踪控制问题。和以往文献相比,本文使用的事件触发与量化器可通过调整参数对网络资源进行合理调配,更好地协调控制性能与调度网络资源之间的关系,并一定程度上改进了跟踪误差。但是,在工业生产等应用中,系统往往受到外部因素的干扰,因此,有必要研究外部扰动对系统以及跟踪误差的影响。3 数值仿真




4 结束语
猜你喜欢
煤气与热力(2021年12期)2022-01-19
今日中国·法文版(2020年7期)2020-07-04
电子制作(2019年13期)2020-01-14
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
读与写·教育教学版(2017年10期)2017-11-10
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
山东青年(2016年2期)2016-02-28
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10