
中低速磁浮列车悬浮传感器信号传输
2020-04-12 09:18李中秀曾晓荣罗茹丹
同济大学学报(自然科学版) 2020年3期
吴 峻,李中秀,曾晓荣,罗茹丹
(1. 国防科技大学智能科学学院,湖南长沙410073;2. 北京磁悬浮技术发展有限公司长沙分公司,湖南长沙410073)
中低速磁浮列车采用无接触的悬浮和直线牵引原理,以无磨损、低噪音以及高速、安全、平稳、舒适等优点受到了广泛关注。在运行过程中,悬浮系统控制车厢始终与轨道之间保持8 mm 左右的悬浮间隙,悬浮间隙检测由悬浮传感器完成。悬浮传感器安装在车辆悬浮电磁铁的端部,处于F轨下部,悬浮间隙信号通过较长的电缆线传输给安装在车辆底部的悬浮控制器。悬浮传感器及其传输电缆所处环境存在着多种强磁场,如悬浮磁场、牵引行波磁场以及车辆系统电力电子器件辐射电磁场等,各强磁场的强度、频率差异较大。为了实现车辆稳定地悬浮,要求悬浮传感器实时、准确、可靠地传送信号给悬浮控制器[1],传输环节是容易忽略的部分。
中低速磁浮交通正处于应用和发展阶段。悬浮传感器的研究多集中在结构、功能以及指标实现等方面[1-8],而针对悬浮传感器与悬浮控制器之间数据传输的文献很少,只有研究悬浮传感器信号传输系统的有关阻抗匹配的文献[9]。面对悬浮传感器及其传输电缆所处的复杂电磁环境,为了保证悬浮传感器的信号实时、准确、可靠地传送给悬浮控制器,有必要对悬浮传感器信号传输面临的主要问题进行研究。
本研究内容包括:通过对悬浮传感器信号传输系统简化模型的分析,根据阻抗匹配原则,确定主要器件参数;实施相应试验来确认数字接口的传输延时,通过试验验证传输延时是否对控制性能造成影响;分析传输电缆可能耦合的电磁干扰形式,增加相应的接口电路并进行抗扰度测试。
1 悬浮传感器信号传输系统及主要器件参数
如图1 所示,悬浮传感器信号传输系统主要由485转换芯片、双绞屏蔽线以及网络变压器等三部分组成[9]。悬浮传感器通过3 m 长的电缆发送数据到悬浮控制器,双绞线信号的单位长度延时为6 nm·m-1,悬浮传感器信号上升时间为17 ns,因此悬浮传感器信号传输系统可认为是传输线系统,需要考虑信号受传输线的影响。采用网络变压器作为接收终端,可以物理隔离悬浮传感器与悬浮控制器之间的电源和地,对于提升可靠性有益,但容易造成阻抗不匹配和信号衰减变形。因此,信号在传输过程中的阻抗匹配问题需要重点关注,以保证信号具有足够的传输能力。此处的传输能力是指信号传输不出现变形,输出信号高电平处于+2~+6 V,低电平处于-2~-6 V。应用传输线理论,结合网络变压器结构,形成传感器信号传输系统的简化等效电路,如图2 所示。图2 中,Zs、Zo、Rt、Ln分别为信号源内阻、传输线阻抗、终端并联匹配电阻以及网络变压器等效电感,分别为信号源电压及负载端输出电压。各参数之间的关系为

式中:ZL为包括匹配电阻在内的负载阻抗;γ、l 分别为信号在传输导线中的损耗系数和传输导线长度。
目前采用的电缆(AWG#24)电气参数如表1所示。表1中,R0、L0、和C0分别表示电缆的有效电阻、电感以及电容。电缆线长度为3 m,信号频率f 为1 MHz,传输线的传播常数与特性阻抗[10-12]如下所示:


式中:R、L、C和G分别表示传输线的电阻、电感、电容和电导。对于AWG#24电缆,G可忽略。

图1 悬浮传感器信号传输系统组成Fig.1 Composition of suspension sensor signal transmission system

图2 悬浮传感器信号传输系统等效电路Fig.2 Equivalent circuit for suspension sensor signal transmission system
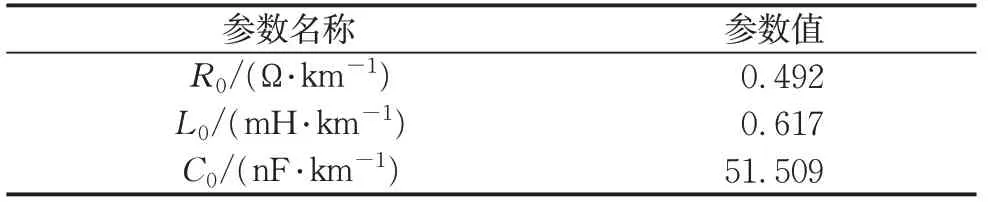
表1 AWG#24双绞线电缆参数Tab.1 Parameters of AWG#24 twisted pair cable
由于485 转换芯片的输出阻抗很小、传输导线线路短、传输损耗小,因此式(1)可以直接简化为

根据阻抗匹配原则,为保证网络变压器端输出最大信号幅值,终端并联电阻选取与传输线特性阻抗基本相当的电阻值,为100~120 Ω。另外,网络变压器的等效电感值选取也根据阻抗匹配原则,结合信号传输速率,要求网络变压器在1 MHz 频率内满足Lmin≥100 μH。对于接收端,为使信号电平在控制器电源所允许的范围内,需在网络变压器的副边中心点与地之间连接电容,根据原边和副边的阻抗大小,匹配的容抗值可以选为200~300 Ω,结合信号的传输速率,可得出电容值大小为530~795 pF。
图3为根据上述阻抗匹配原则确认相应器件参数后的悬浮传感器传输系统最终输出信号示例。从图3 可以看出,信号传输稳定,未出现畸变和较大衰减。

图3 网络变压器输出信号示例Fig.3 Output signal example of network transformer
2 悬浮传感器信号传输延时的分析与验证
悬浮传感器与悬浮控制器之间采用如图4所示的协议传输数字信号。为了保持数据同步,在传输数据字的同时交替传输一组同步字,同步字数据宽度为13 位,数据字数据宽度为12 位,若传输波特率为1 Mbit·s-1,则悬浮传感器在传输通道上的延时为25 μs。快速运行的磁浮车辆首先要求悬浮传感器具备快速跟踪并检测轨道的能力,这对悬浮控制系统在不同速度条件下安全悬浮并有效通过不同线型的轨道具有重要意义。因此,分析该传输延时是否对悬浮传感器的动态特性造成影响很有必要。

图4 串行数据传输协议Fig.4 Serial data transfer protocol
中低速磁浮列车具有爬坡能力强的优点,当其快速通过坡道时,电磁铁的悬浮间隙在此过程中快速发生变化,这就需要悬浮传感器具有快速跟踪和检测的能力,及时地传递间隙信号。因此,下文分析悬浮控制系统对悬浮传感器的动态特性要求。
坡道可简化为如图5所示的竖曲线[13]。设坡道角为α,AB 为竖曲线的缓和曲线,取缓和曲线为圆曲线,并设圆曲线半径为R,圆心角为θ,列车以匀速v行驶,则

图5 竖曲线示意图Fig.5 Diagram of vertical curve

θ较小时,列车竖直方向位移

式(2)体现的是磁浮列车通过竖曲线时,悬浮传感器能够跟随的变化。若将悬浮传感器等效为一个一阶惯性环节,则时间常数τ、延迟时间Td与带宽频率fb之间的关系为

根据一阶系统动态响应特性,当延迟Td时,悬浮传感器可以完全跟踪阶跃输入。根据悬浮控制系统对悬浮传感器位置误差小于±0.2 mm的要求,以及车辆通过最小竖曲线半径为1 000 m、最大速度为105 km·h-1的能力要求,结合式(2)和(3),计算得到悬浮传感器允许的最大延时为68 ms。在传输波特率为1 Mbit·s-1的条件下,采用串行数字传输的悬浮传感器只有25 μs传输延时,因此串行数字传输的延时不会影响悬浮传感器的动态特性。
为了进一步验证悬浮传感器的动态特性,采用如图6所示的测试方案。被测的轨道钢材料放置在振动台上,悬浮传感器安装在特制台架上,其中支架放置在振动台的隔振带外,以避免受到振动影响。将激光位移计作为测试对比。振动台静止时,悬浮传感器测量面到被测导体之间的间隙为10 mm。振动台带动轨道钢在竖直方向做正弦运动,频率和幅值如表2所示,不同频率振动位移输入下的检测结果如图7所示。图7中,ΔGap1、ΔGap3、d分别表示悬浮传感器通道Gap1和Gap3的检测输出间隙以及实际位移。

图6 测试方案Fig.6 Test program
为了分辨各自的响应特性,设计悬浮传感器各通道的检测输出不重合。结果表明,在110 Hz 频率范围内,数字化过程幅频特性基本不变,但会在110 Hz 处产生接近4°的相位滞后。在110 Hz 频带范围内,悬浮传感器未出现明显的衰减和相位滞后。从测试结果来看,整体延时远远小于允许的最大延时68 ms,因此串行传输引入的延时不会影响悬浮传感器需满足的悬浮系统要求。

表2 振动频率和幅值Fig.2 Vibration frequency and amplitude

图7 不同频率振动位移输入下的检测结果Fig.7 Detection results with different frequency vibration and displacement inputs
3 悬浮传感器信号传输系统电磁干扰的分析与测试
悬浮传感器通过3 m长沿转向架铺设的电缆线将数据传送给位于车厢底部的悬浮控制器,悬浮传感器与传输电缆所处电磁环境复杂,电磁干扰较多。实际工况下,在列车运行过程中,杂散电流的存在致使一定量的静电电荷在悬浮传感器壳体上积聚,由此产生的强烈放电造成悬浮传感器不可恢复的故障。此外,悬浮控制系统的斩波器动作时所产生的脉冲群在传导的同时也会向空间辐射,成为悬浮传感器的电磁干扰;同时,悬浮传感器的安装位置使其处在悬浮磁场和牵引行波磁场之中,有可能对信号的传输造成影响。为保证悬浮系统正常且稳定地工作,悬浮传感器的传输通道必须具有一定的抗干扰能力,能够经受电快速瞬变抗扰度试验和射频场感应传导干扰抗扰度试验两项考核[14]。
电快速瞬变抗扰度试验[15],是指通过容性耦合夹在通信电缆线之间施加的一种脉冲群干扰。图8为国际电工组织定义的干扰测试波形。这种干扰频谱较宽,能量不大,以差模和共模方式作用于电源和信号端口,对设备产生严重干扰,它一般不会损坏器件,但会使设备工作出现“软”故障,如程序混乱、数据丢失或功能丧失等。图9 中,实验室电源采用了含有去耦网络的不受干扰影响的纯净电源。

图8 电快速瞬变抗扰度波形定义Fig.8 Definition of electrical fast transient

图9 悬浮传感器的电快速瞬变脉冲群抗扰度试验布置Fig.9 Electrical fast transient test arrangement of suspension sensors
传输线缆中包含的信号线采用了RS485差动传输方式,这种传输方式本身就具有较强抑制共模干扰的能力,但电源线并没有这种机制,干扰容易耦合到电源回路而造成影响。因此,针对信号传输系统,主要在电源回路中设计了共模滤波电路和共模器件。如图10 所示,电源回路采用了磁珠、共模电感以及共模形式的暂态电压抑制器等。另外,数字接口采用串行传输协议,利用协议中的同步字技术,使悬浮控制器与悬浮传感器之间的数据传输实现同步脉冲节拍的接收,从而避免因脉冲群的扰动而出现的时序混乱。图11 为悬浮传感器在测量间隙为11 mm 时受脉冲群干扰的测试输出结果。测试条件为干扰幅值2 kV、上升时间5/50 ns、重复频率5 kHz的脉冲群。可以看出,受脉冲群的影响非常小,悬浮传感器通过了电快速瞬变脉冲群抗扰度测试。

图10 电源回路的滤波电路Fig.10 Filter circuit of power circuit

图11 电快速瞬变抗扰度测试下的悬浮传感器输出Fig.11 Suspension sensor output under electrical fast transient test
射频场感应的传导抗扰度试验[16],实际上是通过感性耦合钳将0.15~80.00 MHz的干扰信号通过调制及扫描的方式施加到通信电缆线上,在低频段主要表现为差模传导干扰,在较高频段则主要表现为共模传导干扰。在电源输入线和输出线上设置合适的线路滤波器是抑制传导干扰的有效措施。图12为悬浮传感器在射频场感应时的传导抗扰度试验。
如图10 所示的滤波电路实际上也针对射频场感应的传导抗扰度测试,可抑制较高频段的共模干扰。除滤波之外,屏蔽也是抗电磁干扰的重要措施。因此,电缆线的屏蔽层和悬浮传感器的外壳需紧密连接,要避免过高的接地电阻及长导线在高频情况下出现过高的阻抗,导致屏蔽层不能将骚扰电压导至地平面。由于悬浮传感器盖板与壳体的搭接部位通过螺钉连接,容易造成屏蔽体的导电不连续,缝隙处也会产生二次辐射,对内部电路造成干扰,因此应采用导电酯对接缝部位进行填充处理,保证壳体的导电连续性。将悬浮传感器壳体接口与屏蔽线、悬浮控制器接口与屏蔽线分别连接,构成了完整的屏蔽体,以提升悬浮传感器传输系统的屏蔽效能。在实际安装中,悬浮传感器壳体的安装面应与电磁铁接触。在悬浮传感器维护过程中安装面可能受到粉尘、油污等的影响而使得接地阻抗增加,这也需格外注意。

图12 悬浮传感器射频场感应的传导抗扰度试验Fig.12 Conducted immunity test of suspension sensor radio-frequency field induction
通过上述措施,在射频场感应的传导抗扰度试验中,悬浮传感器输出信号稳定,波动不超出±0.2 mm,通过了射频场感应传导抗扰度测试。
4 结论
(1)在终端采用网络变压器的方式下,在简化阻抗分析电路的基础上,以阻抗匹配为原则,计算了悬浮传感器传输系统主要器件参数。数据传输速率为1 Mbit·s-1,线缆采用3 m 长的AWG#24 双绞线,终端匹配电阻为并联形式,电阻值选取为100~120 Ω,网络变压器在1 MHz 频率内满足Lmin≥100 μH,此时传输信号畸变小。
(2)数据传输速率为1 Mbit·s-1,悬浮传感器同步串行传输方式造成了25 μs延时,通过分析和试验验证,这种延时能够满足悬浮系统110 Hz 带宽的要求。
(3)根据传感器电快速瞬变抗扰度试验和射频场感应传导干扰抗扰度试验的要求,设计了悬浮传感器电源回路的滤波电路,分析了屏蔽和接地措施,并通过了上述两项测试。
猜你喜欢
电源学报(2022年1期)2022-02-25
心电与循环(2021年6期)2021-12-14
地震研究(2021年1期)2021-04-13
安徽科技(2021年3期)2021-04-06
日用电器(2020年9期)2020-10-15
电子制作(2019年14期)2019-08-20
探测与控制学报(2018年4期)2018-09-11
发明与创新·大科技(2016年10期)2016-10-22
对联(2015年22期)2015-06-11
食品工业科技(2014年23期)2014-03-11
