大深度潜航器水下空间运动建模与仿真
2020-04-20 14:02乔冰,刘鑫,袁龙
数字海洋与水下攻防 2020年1期
乔 冰,刘 鑫,袁 龙
(1.中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003;2.中国人民解放军32023部队,辽宁 大连 116000;3.中国人民解放军32033部队,海南 海口 571100)
0 引言
自主式水下无人潜航器(AUV)是在无人操控的情况下自主完成复杂海洋环境作业的水下机器人,广泛应用于海洋观测和海洋作业领域[1-2]。对于大深度作业的潜航器,其续航能力、空间运动能力、航行稳定性等是其水下深海作业的基础。通过数学仿真手段,分析大深度潜航器水下空间运动状态,对潜航器总体设计和参数优化具有深远的指导意义。
本文研究的大深度潜航器为深海搜索探测型AUV,其通过释放浮筒装置产生负浮力,并结合安装在头部附近的弧形翼板提供侧向力和力矩,实现潜航器的无动力螺旋下潜。当潜航器到达预定水深时,将弧形翼板和下潜压载同时释放,此时潜航器稳定过渡至预定水深航行;当潜航器上浮时,通过释放上浮压载产生正浮力实现定角爬升;当接近水平面时,释放平衡压载实现稳定过渡至水面。其水下空间运动过程如图1所示。本文对潜航器在大攻角条件下进行运动建模与仿真,分析其在弧形翼板作用下的螺旋下潜以及抛载调节质浮心距实现下潜、上浮的运动特性,并实现各运动过程之间进行切换,给出潜航器水下空间运动全过程仿真结果。

图1 潜航器水下空间运动方案Fig.1 Underwater space motion scheme of vehicle
1 潜航器外形
潜航器外形为回转体,为了实现潜航器无动力螺旋下潜运动,在潜航器首部下潜压载下方加装弧形翼板。弧形翼板的安装位置和局部细节如图2所示。

图2 弧形翼板安装位置及细节图Fig.2 Installation position and detail diagram of arc wing-plate
弧形翼板随下潜压载一同安装释放,主要功能是实现潜航器的无动力螺旋下潜。当潜航器到达预定水深时,将弧形翼板和下潜压载同时抛掉,此时潜航器在预定水深达到平衡,开始工作。
2 潜航器空间运动建模
建立潜航器水下空间运动模型是研究其空间运动的基础。根据大深度潜航器空间运动特点,建立描述其空间运动的数学模型,并将数学模型进行二次建模转换,建立潜航器空间运动仿真模型,用于大深度潜航器水下空间运动仿真研究。
2.1 建模流程
为确保建立潜航器空间运动模型的正确性和适用性,如图3所示,建模以下流程。
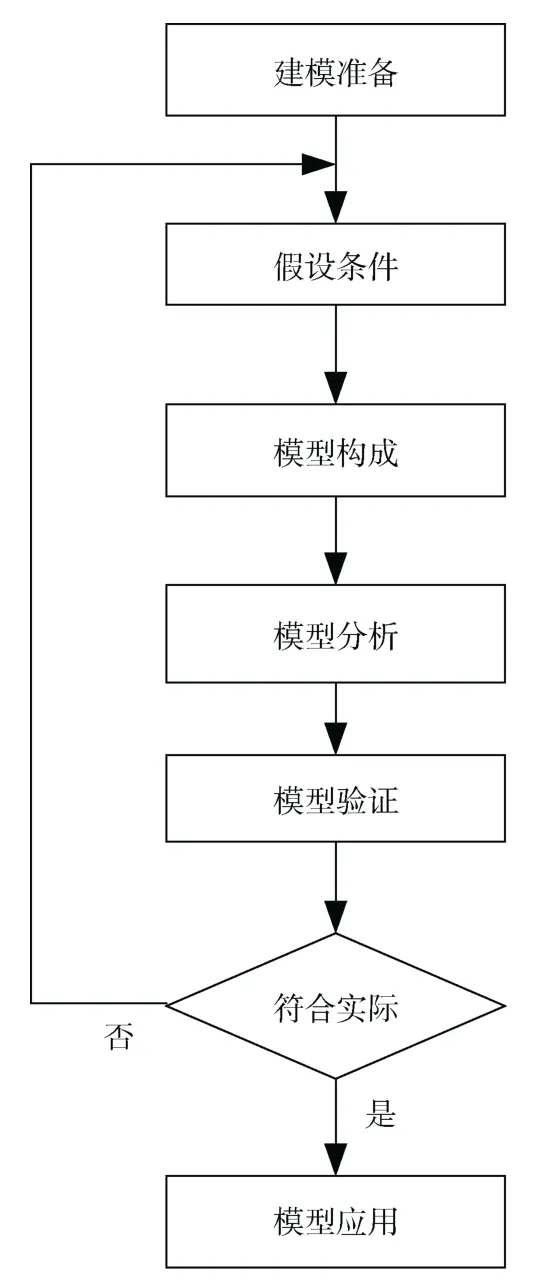
图3 潜航器空间运动建模流程Fig.3 Modeling flow of vehicle’s space motion
1)建模准备。
了解仿真需求和潜航器的自身特点,掌握其空间运动特点,为仿真建模奠定基础。
2)假设条件。
分析潜航器建模的主要作用因素,包括空间运动规律、流体参数和衡重参数等作用因素,并假设研究对象为水下全沾湿状态下进行模型的搭建。
3)模型构成。
根据建模的假设条件和建模原理,引入描述潜航器空间运动规律运动学模型和动力学模型,选取合适的建模坐标系(详见章节2.2),建立在相应坐标系下的潜航器空间运动数学模型。
4)模型分析。
基于上述准备,完成对潜航器空间运动微分方程组的理论推导,通过数值求解得到初步的空间运动轨迹,并对结果进行数学分析。
5)模型验证。
对所建模型在典型工况下进行数学仿真计算,并分析仿真结果是否满足要求,分析其运动规律与设定结果是否接近或相符。
6)模型应用。
在模型验证正确的基础上,根据仿真的用途和建模的目的将潜航器数学模型转化为适用于仿真分析的仿真模型,应用于仿真分析研究。
2.2 建模坐标系
选取合适的建模坐标系是建立潜航器空间运动数学模型的前提。本文采用大地坐标系o0x0y0z0和体坐标系oxyz为基础建立潜航器空间运动数学模型,现给出各个坐标系的定义及相互转换关系。
1)大地坐标系o0x0y0z0。
大地坐标系相对于地面静止不动。其原点o0选在地面某处;o0x0轴在水平面内指向任意方向;o0y0轴铅直向上;o0z0轴垂直于o0x0和o0y0轴,其方向使该坐标系成为右手坐标系。潜航器相对大地坐标系的运动就是其相对地面的运动。
2)体坐标系oxyz。
体坐标系也称运动坐标系,体坐标系各坐标轴与潜航器固连(相对于潜航器静止不动)。体坐标系的原点o选在潜航器的浮心处;ox轴沿潜航器纵轴并指向前方;oy轴位于潜航器的纵向对称面内,与ox轴垂直并指向上方;oz轴垂直于ox和oy轴,其方向使该坐标系成为右手坐标系(从潜航器尾部向前看oz轴指向右侧)。
3)坐标系转换。
大地坐标系与体坐标系如图4-5所示。
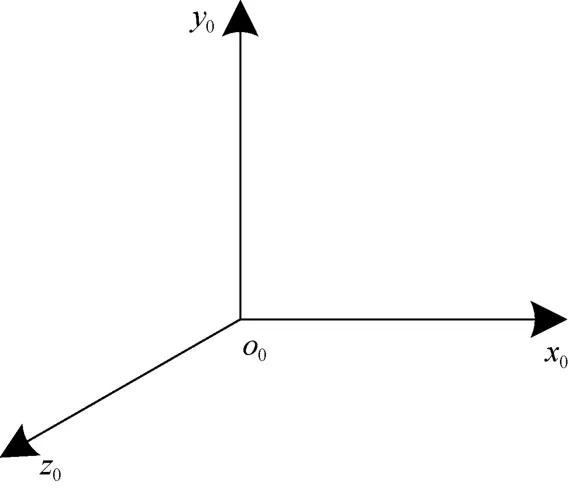
图4 大地坐标系示意图Fig.4 Schematic diagram of geodetic coordinate

图5 体坐标系示意图Fig.5 Schematic diagram of volume coordinate
体坐标系相对与大地坐标系的姿态,利用3个姿态角θ、ψ、φ进行描述,分别为俯仰角、偏航角、横滚角。从大地坐标系(用o表示)到体坐标系(用b表示)的转换矩阵为

展开表达式有:

根据矩阵的正交性,体坐标系到大地坐标系的坐标转换矩阵为
2.3 数学模型
建立潜航器空间运动数学模型时,可视其为刚体,将流体动力和其他作用力作为外力。根据上述坐标系及转换矩阵推导出空间运动方程;根据动力定理和动量矩定理推导出动力学方程[3];潜航器空间运动数学模型由运动学模型和动力学模型组成。
1)运动学方程。
运动学方程由描述潜航器空间运动的航行轨迹方程和转动运动方程组成,具体数学模型描述为

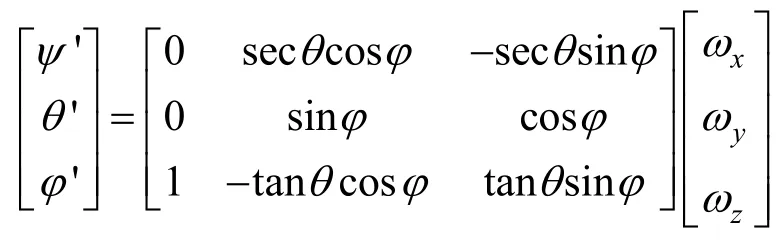
式中:x0、y0、z0为潜航器相对于大地坐标系的位 置 ;vx、vy、vz为 潜航器浮心在体坐标系中相对各坐标轴的速度分量;ωx、ωy、ωz为潜航器旋转角速度在体坐标系中相对各坐标轴的角速度分量。
2)动力学方程。
根据空间刚体的动量定理和动量矩定理,在大地坐标系中有:

将上述向量式展开,并忽略无穷小项,得到动力学方程组:

式中:Fx、Fy、Fz和Mx、My、Mz分别为作用于水下潜航器各坐标轴上的外力和力矩之和;xc、yc、zc为潜航器的质浮心距;Jx、Jy、Jz为潜航器坐标系下相对各坐标轴的转动惯量;m为潜航器的质量。
3)流体动力分析。
当潜航器在水中航行时,流体在潜航器外形表面流动,潜航器与流体相互作用便发生在它们相互作用的表面[4],因此潜航器的外形设计决定了其流体动力学性能。文中研究的潜航器通过首部设计的弧形翼板实现螺旋下潜运动,采用数值水洞仿真试验方法[5]计算潜航器运动过程的流体动力系数,并施加在动力学方程中进行空间运动解算。
由于潜航器在螺旋下潜的过程中,会产生较大的攻角和侧滑角,因此流体动力表现出明显的非线性[6]。在进行流体动力参数拟合过程中,关于攻角的流体参数,采用多项式形式表达,充分考虑了参数的非线性问题。其中,升力系数和俯仰力矩系数拟合结果为

2.4 仿真模型
建立潜航器空间运动仿真模型就是将上述数学模型通过仿真软件转化为适用于计算机仿真分析的过程。根据潜航器空间运动特点,空间运动描述要求在大攻角条件下进行建模仿真。基于上述数学模型的推导和建模流程,利用 MATLAB/Simulink模块化建模方式实现潜航器的空间运动仿真模型的搭建[7-8]。仿真模型采用的模块化设计,方便模块的移植和编写,并且易于对特定参数进行修改。
3 潜航器空间运动仿真
根据研究对象空间运动的特点,潜航器在进行大深度水下运动过程中包含螺旋下潜段、抛载过渡段、定角爬升段、稳定至水面段4种运动过程。其运动过程是在大攻角状态下进行的,并在各个运动阶段之间进行切换,参数变化较复杂,仿真难度较大。本文通过计算仿真辅助手段,对潜航器空间运动进行仿真分析,给出潜航器水下空间运动全过程运动仿真。
3.1 仿真设置
潜航器水下空间全过程运动仿真参数设置如表1所示。
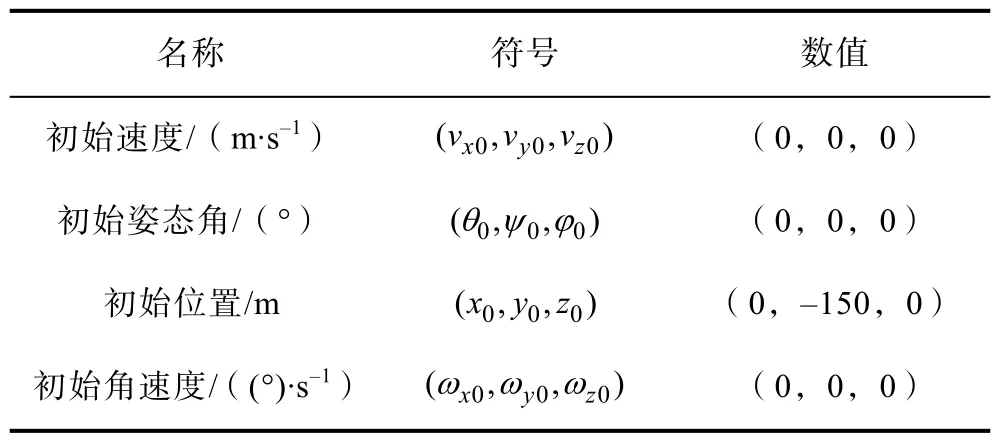
表1 全过程运动仿真设置Table 1 Motion simulation settings of whole process
3.2 仿真曲线
为了便于观测潜航器水下运动全过程,仿真设计将各个运动阶段的仿真时间较实际工作时间缩短。其中,螺旋下潜段的仿真时间为300 s;仿真进行到300 s时,进行抛载动作;稳定过渡至400 s时,进行定角爬升;爬升至900 s时,进行抛载过渡仿真;总仿真时长为1 200 s。潜航器水下空间运动仿真结果如图6-9所示。
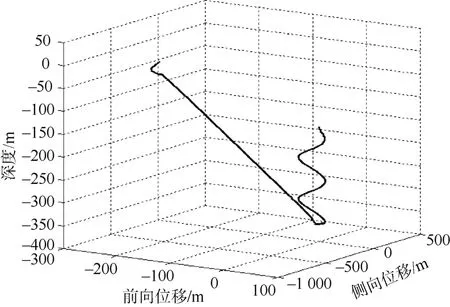
图6 航行轨迹曲线Fig.6 Navigation trajectory curve
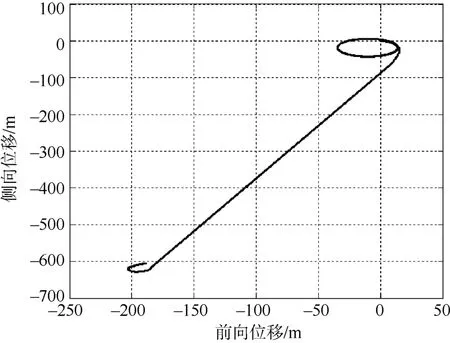
图7 螺旋下潜回转直径Fig.7 Rotating diameter of spiral dive
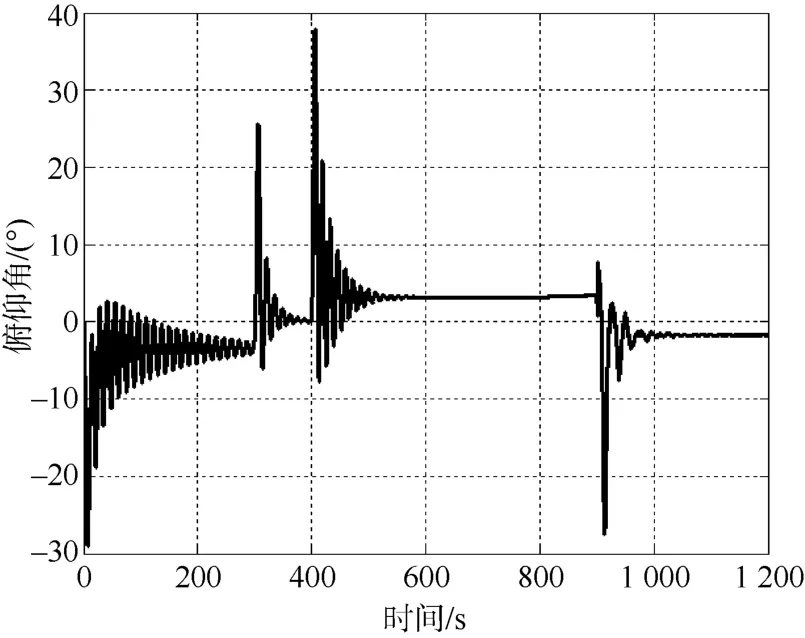
图8 俯仰角曲线Fig.8 Curve of pitch angle

图9 攻角曲线Fig.9 Curve of attack angle
3.3 结果分析
由上述仿真曲线可知:潜航器在螺旋下潜段(0~300 s)、抛载稳定至水下 6 000 m 段(300~400 s),定角爬升段(400~900 s)的运动状态均符合预期设想,满足设计需要;通过运动建模与仿真分析手段有效验证了潜航器弧形翼板总体设计的可行性和水下空间运动能力。
4 结束语
本文对大深度潜航器的空间运动模型和运动仿真展开了分析和研究。针对潜航器空间运动特点,建立符合其空间运动规律的数学模型和仿真模型;以仿真模型为基础,通过数学仿真方法分析了潜航器在螺旋下潜、抛载过渡、定角爬升、稳定至水面运动的全过程运动状态。仿真结果表明:本文所研究的潜航器采用弧形翼板设计可实现螺旋下潜功能,且航行稳定;通过抛载实现潜航体质浮心距的调节,满足了潜航器在上浮过程定角爬升的要求。
通过对大深度作业下潜航器的建模与空间运动仿真研究,可为设计人员在潜航器弧形翼板总体方案设计及运动参数优化方面提供有效的考核验证手段,有效指导设计人员评估潜航器的空间运动能力,提前释放设计风险。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
中国典型病例大全(2022年13期)2022-05-10
中国典型病例大全(2022年9期)2022-04-19
导航定位学报(2022年2期)2022-04-11
语数外学习·高中版中旬(2021年11期)2021-02-14
好孩子画报(2020年10期)2020-11-02
扬子江诗刊(2019年2期)2019-11-13
扬子江(2019年2期)2019-06-14
扬子江(2019年1期)2019-03-08
考试周刊(2018年15期)2018-01-21