一种倾转四旋翼无人机气动特性研究
2020-04-22 08:31伍咏成陈自力季近健
兵器装备工程学报 2020年3期
伍咏成,陈自力,季近健
(1.陆军工程大学石家庄校区,石家庄 050003;2.中国人民解放军66336部队,河北 保定 074000)
倾转四旋翼无人机是把固定翼无人机与四旋翼无人机的特点结合起来的一种新型无人机。它既可以像四旋翼无人机一样垂直起降与悬停,也可以像固定翼无人机一样拥有较快的巡航速度以及较长的航程[1],相对于倾转双旋翼无人机,它具有更强的运载能力以及更快的飞行速度。
由于倾转四旋翼无人机同时存在旋翼和机翼两种升力装置,且二者之间存在气动干扰,这使得该种无人机的气动特性较为复杂。当前针对无人机的气动特性研究主要有实验研究和数值模拟两大类方法。实验研究多采用风洞的方法来分析气动特性,但这种方法需要建立专门的实验室,具有成本高、实验周期长的缺点,多用于战斗机、客机的设计和制造等工业过程中。
随着数值计算理论的发展和计算机性能的提升,计算流体力学(CFD)方法逐渐成为无人机气动特性研究的重要方法[2-4]。CFD方法利用数值计算方法的理论,通过计算机计算,得到流体控制方程的近似解,极大地节省了实验成本以及科研工作者的时间。
目前对于倾转旋翼机的气动分析主要以倾转双旋翼机为研究对象进行分析[5-7],而对于倾转四旋翼无人机的气动分析研究成果还比较少。本研究以一种X型架构的倾转四旋翼无人机为研究对象,用CFD方法进行数值模拟,分析了该种无人机的升力特性。针对垂直模式和过渡模式两种飞行模式,分析了旋翼对机翼的气动作用影响,为倾转四旋翼无人机的设计和控制理论研究提供了借鉴和参考。
1 倾转四旋翼无人机
本文研究的倾转四旋翼无人机采用前翼加后翼的两副机翼来为无人机提供气动升力,在机翼的翼展末端,挂有可以倾转的旋翼短舱。基于以上设计,利用Solidworks绘制了无人机的三维物理模型,如图1所示。

图1 倾转四旋翼无人机三维模型示意图
倾转四旋翼无人机有3种飞行模式:
1)垂直模式。当旋翼短舱倾转角度为0°,与机翼面垂直时,主要由旋翼拉力为无人机提供升力。此模式下的飞行速度较低,升降舵面对纵向姿态几乎无控制效果。
2)水平模式。当旋翼短舱倾转90°,与机翼面水平时,主要由气动力为无人机提供升力,旋翼拉力此时为无人机提供推力,此模式的飞行速度较快,可以实现高速巡航。
3)过渡模式。当旋翼短舱倾转角度在0°~90°时,无人机的升力由旋翼拉力以及气动力共同提供,在由垂直模式过渡为水平模式的过程中,无人机的飞行速度不断增大,升降舵面对纵向姿态的控制效果逐渐增强。
通过旋翼短舱倾转不同的角度,可以实现无人机在水平模式、垂直模式与过渡模式3种飞行模式之间的切换。无人机的重心配置在前后两副机翼之间,以保持飞行过程中的力矩稳定性。前后机翼的翼型均取自NACA标准翼型库。
2 基于CFD方法的流场求解
2.1 控制方程
流体运动的基本规律为物理学上的三大守恒定律,即质量守恒定律、动量守恒定律以及能量守恒定律[8]。这三大定律结合起来,就组成了描述流体运动特征的基本控制方程,即Navier-Stokes(N-S)方程[9]。
目前研究旋翼的气动特性有很多种方法,比如动量源法,滑移网格法以及运动嵌套网格等方法。其中动量源法具有网格生成难度小,网格数量少,数值解计算快的优点,本研究采用动量源法模拟旋翼对流场的作用。动量源法的基本思想是以等效盘代替旋翼,把螺旋桨对流场的作用以动量源的形式添加到N-S控制方程中。添加了动量源项的N-S控制方程如下[10]:

(1)

2.2 网格划分
CFD方法是基于对流场进行离散化,采用数值计算的方法进行控制方程的求解。按照一定规律分布在流场中的离散点的集合就是网格。网格的生成是进行CFD计算的重要步骤也是工作量最大的步骤,生成的网格质量决定了数值计算的精度以及计算的效率。
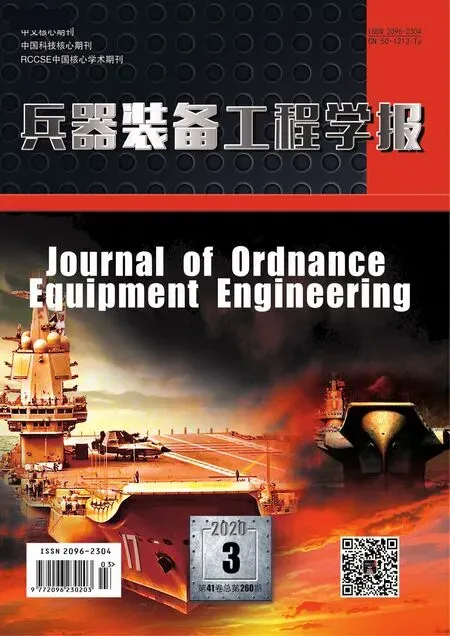
计算网格主要分为结构性网格、非结构性网格与混合网格3种[11]。随着非结构网格技术不断发展,其网格质量已经满足精确求解的需求。非结构性网格技术尤其适用于复杂形状和多部件装配体网格的自动化生成。本研究采用Fluent Meshing软件中的Poly算法,生成符合计算精度要求的多面体非结构网格。在靠近壁面的部分,采用了棱柱边界层网格,提高数值计算精度。由于旋翼短舱的形状不规则,并且与机翼存在缝隙,不易生成高质量网格,因此在建模过程中忽略了旋翼短舱的部分,只保留了旋翼的等效盘作用面,生成的流场网格如图2所示,网格数量为35万,网格的最大Skewiness为0.4,可以用于数值计算。
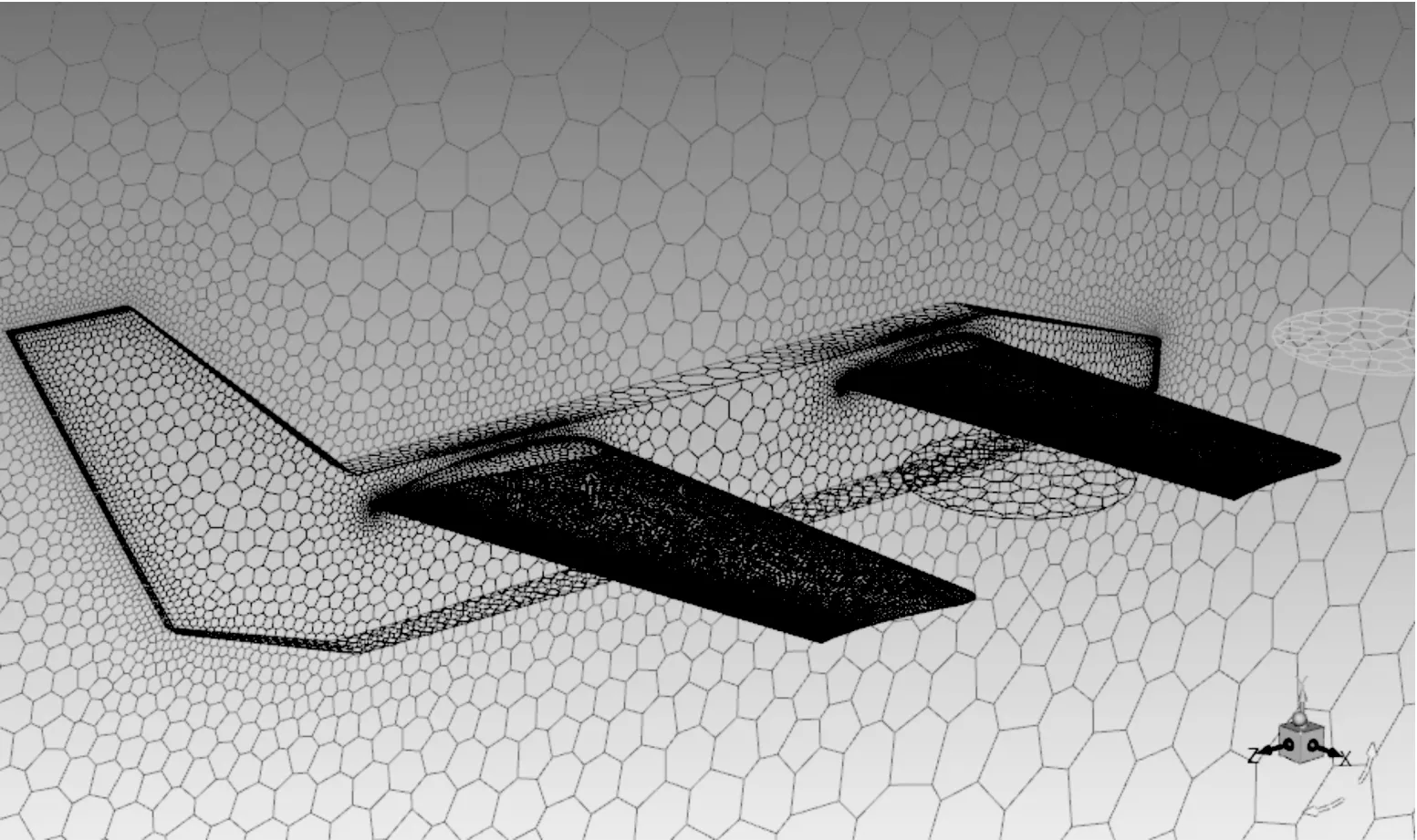
图2 网格结构示意图
2.3 计算方法验证
为了验证动量源法模拟旋翼气动结果的正确性和准确型,设计了旋翼拉力实验与仿真结果进行对比。旋翼参数如表1所示。

表1 旋翼参数
计算此旋翼流场所使用的网格如图3所示:
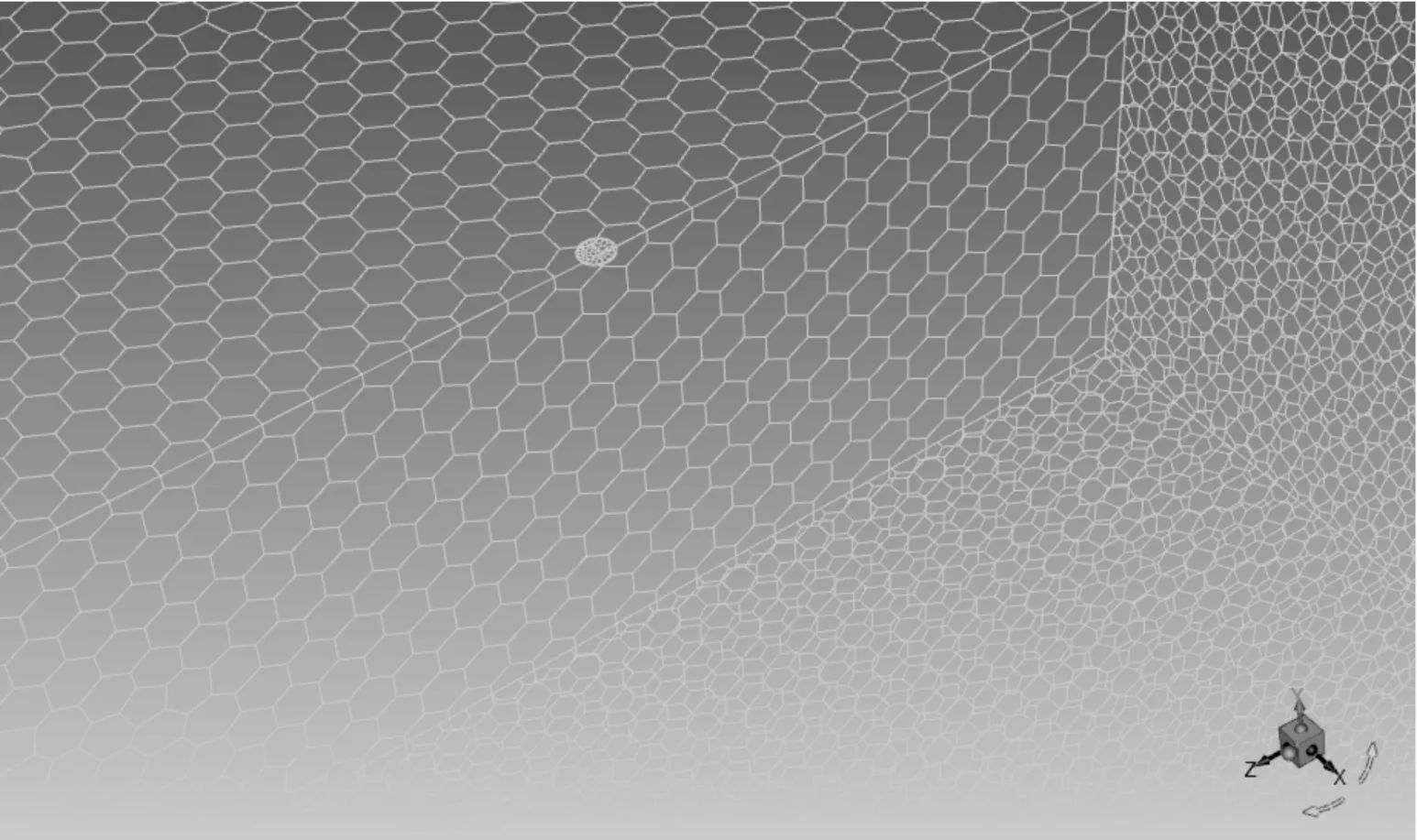
图3 计算旋翼流场网格结构
计算此旋翼流场所使用的湍流模型为SSTk-ω模型,经过对比,SSTk-ω模型能够得到较为准确的数值解。
实验装置为无刷电机拉力转速测试台,将电子调速器和带有旋翼的无刷电机安装在测试台上,获得拉力与转速的实验数据。
数值计算得到的结果与实验结果如图4所示。
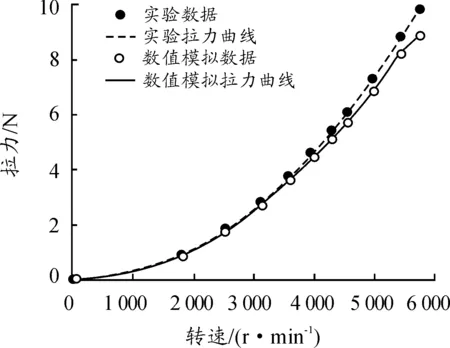
图4 旋翼拉力计算值与实验值
由图可知,使用动量源方法对旋翼流场进行模拟在低速情况下可以获得与实验值接近的结果,满足数值模拟的计算精度要求。
3 气动特性分析
将建立的用于倾转四旋翼无人机流场计算的网格文件导入求解器,设置相关参数,壁面的边界条件,选择求解方法,即可开始迭代计算流场的数值解。由于无人机为对称结构且流场分布均匀,为了减少计算量,只对无人机的半模型进行气动分析,同时将对称面设置为symmetry边界条件。无人机垂直模式下的压力云图如图5。

图5 垂直模式压力云图
由压力云图可知,旋翼产生的下洗流打在了机翼的上表面,形成了高压区,并且气流会沿着翼展方向扩散。为了研究旋翼下洗流对气动特性的影响,绘制出有旋翼和无旋翼两种状态下的无人机升力特性曲线,如图6。
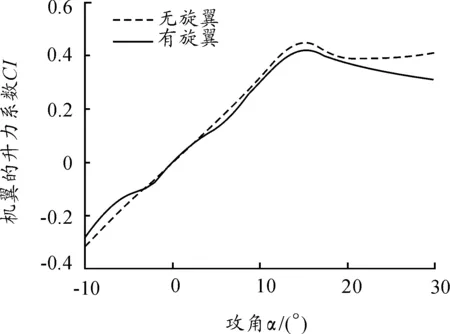
图6 两种状态下无人机的升力特性曲线
由图6可知,旋翼产生的下洗流会对无人机的升力产生负面影响,应尽量减少下洗载荷对机翼的影响,可以考虑更改旋翼与机翼的相对位置,如布置在机翼的尾缘。在过渡模式下,由于旋翼倾转角度的变化,旋翼的下洗流方向也会发生较大变化,为了区分于水平模式和垂直模式,本研究选取了过渡过程中最为典型的旋翼倾转角度为45°的情形进行了气动分析。在过渡过程中,旋翼的拉力方向发生了变化,旋翼对无人机俯仰力矩的控制作用逐渐减弱,旋翼由一种控制机构逐渐切换为一种动力装置。设置速度入口的边界条件为5 m/s,压力云图如图7。
由图7可知,由于过渡模式旋翼产生的下洗流方向发生了变化,旋翼对机翼的影响作用有所减少,并且下洗流产生的高压区主要在后翼的部分,此状态下对应的速度矢量如图8。
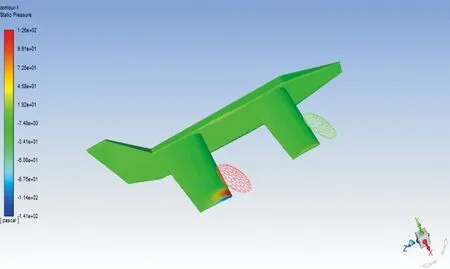
图7 速度为5 m/s时过渡模式压力云图

图8 速度为5 m/s时过渡模式速度矢量图
当飞行速度增加到10 m/s时,无人机的压力云图如图9。

图9 速度为10 m/s时过渡模式压力云图
当飞行速度继续增加到15 m/s时,无人机的压力云图如图10。

图10 速度为15 m/s时过渡模式压力云图
由压力云图可知,随着飞行速度的增加,旋翼对机翼的影响越来越弱,此时倾转四旋翼无人机与固定翼无人机的气动特性相近。因此,在设计过渡模式的操纵策略时,应合理的设计飞行速度与旋翼短舱倾转角度的配合关系,以达到较高的飞行气动效率,提高无人机的操纵稳定性。
4 结论
倾转四旋翼无人机旋翼和机翼两种升力机构存在相互作用。采用动量源法对流场进行了数值仿真计算。在垂直模式下,旋翼产生的下洗流会损失无人机的升力。设计无人机时,应增大旋翼与机翼的距离,减小下洗载荷。在过渡模式下,由于前旋翼的存在,后旋翼对机翼的影响更为强烈,随着飞行速度的增加,旋翼对机翼的影响逐渐减小。在设计过渡模式的操纵策略时,可以采用目标优化等方法,合理设置飞行速度与短舱倾转角度的配合关系,以达到较高的飞行效率及稳定性。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
热带作物学报(2021年1期)2021-02-22
无人机(2019年10期)2019-12-17
科学Fans(2019年4期)2019-04-30
航空模型(2016年10期)2017-05-09
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
智能制造(2015年9期)2015-10-15
小天使·四年级语数英综合(2015年3期)2015-04-20
少年科学(2014年7期)2014-08-18