
基于水利工程GPS控制网布设与测量精度分析
2020-04-22 08:42陈育辉
水利技术监督 2020年2期
陈育辉
(丹东市水利勘测设计研究院,辽宁 丹东 118000)
1 检核控制网起算数据资料
高坎子水电站测区处于下山头电站出口至牛毛坞镇高坎子村之间,总长4.6km。测区内地形复杂多变,道路崎岖不平,林草灌木密集且地势险峻,属于典型的三类困难测区,本次测量的主要任务是完成1.2km2的1∶1000带状地形图测绘以及61个河道大断面测绘。
根据设计部门和项目业主要求,选择国家统一的坐标系统作为计算依据,根据精度为1∶1万地形图校对结果以及测绘数据资料,确定国家级三角点位于高坎子电站测区5、8km的位置,然而现场勘察显示均已被破坏,因此在测量过程中无法使用。根据项目业主提供的相关资料找到3个四等水准点和6个GPS控制点,位于距离高坎子电站16km处,这是组成辽宁省水利施测控制网和北京54坐标系的重要部分。
本次GPS控制网起算点选取6个GPS控制点中的HN02、HN06两点,设计资料显示通过引测HY02水准点可确定这两点的高程。这两点位于高坎子电站的左边,分别处于电站的上、下游区域且能够互相通视。对两点边长、坐标相对精度最简单直接的检验方法为:采用全站仪对向三角高程测量HN06、HN02两点,对斜距和竖直角各测4个测回。通过平均值计算确定高差与平距,然后将数据结果映射至高斯平面内。通过对比一致坐标、高程、高差及高斯平面距离,结果显示两点高差、较差分别为7、15mm。根据以上计算值,确定已知点的位置精度能够符合四等GPS网的精度要求[1- 4]。
由于四等水准点布设于高坎子电站附近,保存完好的永久性标石HY02位于电站周围的一个小山包上,因此选择该点作为本次测量工程的起算点。根据工程设计相关资料,对于高程控制选择四等水准,考虑到如下两方面因素对原有方案作适当调整,即以三角高程替换四等水准进行相关测量:一方面,高坎子电站测区至已知水准点之间的地形陡峭,高差较大,为500~600m,采用水准测量势必会增大测站数,从而导致累计测量误差的增大,由此大大降低测量效率;另一方面,根据测量规范的相关要求,对于地形起伏较大的山区型电站可以将四等水准替换为电磁波三角高程进行控制点的布设与测量,且实践经验表明严格遵循规范要求可以达到四等水准测量精度[5- 8]。
2 三角高程路线布设观测和GPS控制网的设计
考虑到已知点精度满足要求和后期施工会应用该测量成果,基于四等标准对GPS控制网进行设计、观测。结合Google Earth在线三维影像和1∶1万地形图数据,并考虑交通条件和GPS点位要求,在图上对控制网进行选点布设,从而提升观测效率和精度。采用4台双频GPS接受机作为工程测量的主要仪器,并以边连式GPS网进行相应的布设。由于起算点不符合条件且位于控制网的一端,为提高纵横误差的控制水平,在观测过程中除了以边连的方式从起始边逐渐外推外,还要将每一对GPS点间隔一定时段。本次观测共设置11个时段,GPS控制网的技术参数见表1。

表1 GPS控制网设计技术参数

表2 GPS控制网观测技术要求
根据表1的计算结果,总基线数和重复基线的占比数值能够符合水电工程测量规范相关要求。按照工程设计的路线、时段对GPS网进行观测,施测过程中的技术参数见表2。
根据三角高程测量要求和工程经验,选用2台进口全站仪进行相关数据的测量。起测点选择高坎子电站附近的HY02水准点,从起始点按照左右不同的两条路线利用2台全站仪进行测量。在施测过程中左、右路线分别经过GPSE、GPSF、TC01与GPSE、TC02控制点。最终,两路线在GPSE点构成闭合的高程路线。为了降低高差受大气折光和地球曲率的影响,短时间内按照对向观测的方法完成测量。另外,在测量过程中还要考虑气压、温度的影响,结合气压和温度测量结果对测量边长进行适当修正。结合实践经验,输入仪器中的两差改正系数K值为0.12。充分考虑地形特征对测边进行适当调整,为提高测量的准确性和效率尽可能地选择平缓道路。
3 控制网的精度分析
3.1 GPS基线解算精度
GPS网的评查和基线解算为GPS测量数据处理的主要部分,且只有在数据处理后方可体现整个网的测量精度和数据观测质量。边长的均值选取2km,采用Poweradj4.0软件和GPS随机工具进行基线求解、平差计算。完成GPS观测后立即将相关数据输入程序,运行解算软件进行基线处理。数据处理不仅可以检验基线是否存在粗差,而且用于同步环、异步环闭合差以及重复基线的超限程度的检验计算。闭合差的求解可以反映基线误差的大小,结合规范设计要求基线边应处于不低于1个异步环内。通过计算分析可去除存在粗差的基线,为保证计算结果的准确性应重新对误差较大的基线进行观测。在处理基线时若发现某一时段数据观测质量较差,应对其重新观测[9- 10]。
在不同时间内对于同一条基线的观测结果即为重复基线,其较差规范有明确的要求。在较差符合规范要求的条件下,解算和观测的基线为合格;否则最少应存在一个有问题的时段。对于这种现象,可通过检查确定异步环或同步环闭合差。在限差为51.0ds/mm、总数为15的情况下,其线差要求及基线较差大小分布见表3。

表3 重复基线限差级较差分布特征
对环线闭合差、同步与异步环各分量及其限差利用上述方法进行求解,在GPS网中异步与同步环分别为48个、55个,其中三边、四边同步环分别为44个和11个。理论上认为,同一卫星的同时观测会使得同步基线之间具有一定的关联特征,由此计算确定的闭合差应为0。然而,由于基线解算模型的不同和观测过程中各类因素的影响,在实际计算时闭合差往往不等于0,该指标是反映基线相对精度的参数。根据如下公式计算环线闭合差和同步环分量,即
(1)
各坐标分量闭合差在44个三边同步环中的最小、最大值分别为0.52mm与4.05mm,限差为6.20mm,环线闭合差和限差分别为10.60mm、7.55mm。
对基线向量通过非同步观测而组成的封闭环即为异步环,异步环相对于同步环检验能够更加充分地表征基线向量的误差状况和GPS控制网观测质量,因此该指标属于描述基线质量的绝对参数。异步环闭合差符合规范要求时能够说明GPS的观测质量较好,因此可采用下式计算环线闭合差和异步环分量,即

(2)
根据以上计算公式,确定异步环各坐标分量的参数值见表4、表5。
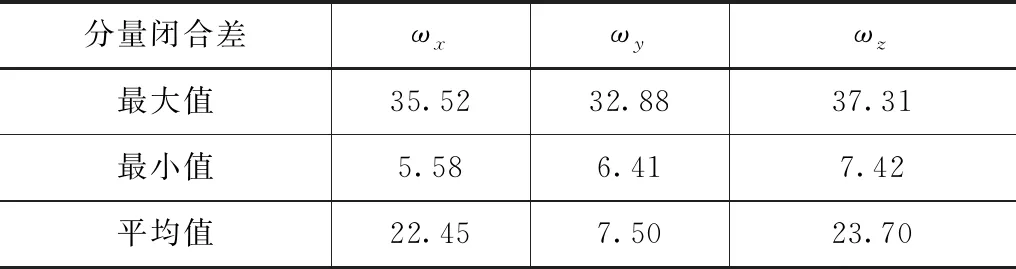
表4 异步环各分量最小、最大及平均闭合差 单位:mm

表5 异步环各分量闭合差概率分布
通过进一步转化计算,异步环闭合差最小、最大和平均闭合差分别为13.50、61.78、37.06mm,限差为106mm。根据数据计算和分析结果,GPS控制网各指标均在规范要求的限差范围内,基线的解算具有较高的精度且数据观测质量可靠。
3.2 GPS控制网平差精度
根据Poweradj4.0要求的*.asc格式将解算合格的基线导出,然后在软件中计算平差。根据BJ54国家坐标系和WGS- 84坐标系统下的约束平差、无约束平差进行相应的计算处理,对GPS控制网利用WGS- 84坐标进行无约束处理时可检验基线是否存在粗差,观测值选取方差协方差矩阵及三维基线向量,起算数据为某一固定点的三维坐标,然后对协方差因子进行调整并计算空间直角坐标系中的点位精度,以及三维基线的相对误差和绝对误差,从而表征控制网的内符合精度,该指标是反映绝对精度的参数。计算统计改正的三维基线各分量见表6。

表6 改正的三维基线向量绝对值 单位:cm
VΔX、VΔY、VΔZ的限差3σ为5.402cm,根据平差计算结果空间坐标系中GPSF点位为最弱的点,其中误差为±1.06cm,X、Y、Z方向的误差分别为±0.52cm、±0.71cm、±0.58cm;点位TC01的误差最小,为±0.43cm,X、Y、Z方向的误差分别为±0.20cm、±0.31cm、±0.24cm。
根据以上结果,所有基线中GPS控制网不存在显著的粗差,且内符合计算要求并具有较高的精度,同时表明协方差矩阵在基线向量中的匹配关系较为合理。在北京54坐标系下固定HN06、HN02点,采用文中公式计算三维约束平差,结果显示在X、Y、Z方向上基线改正数的最大值分别为-3.3、-1.7、-4.2mm。计算统计约束和无约束平差的改较差绝对值见表7。
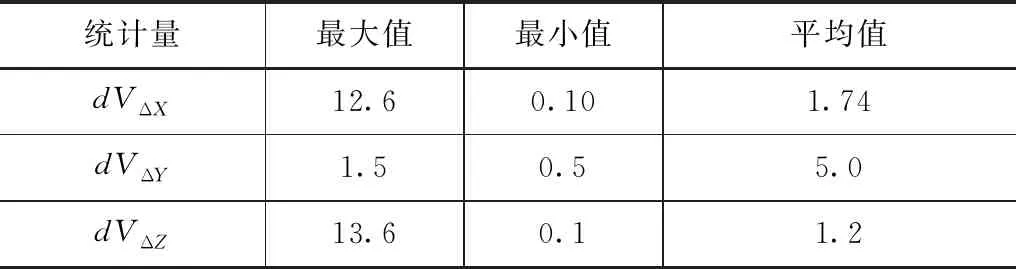
表7 改正数较差绝对值在同一基线各分量上统计结果 单位:mm
对较差限差按规范要求进行计算,即2σ=36.01mm,由此表明表7统计的计算数据均在规范要求的范围以内。选择起算数据为HN06、HN02点,将GPS网强制约束至北京54坐标系下。在实际计算过程中,约束作用会使得控制长存在一定的扭曲与变相,其原因是在方位与尺度上这两个坐标系统存在一定差异,二维约束平差精度见表8。

表8 二维约束平差的误差精度 单位:cm
距离和边长相对最大误差值分别为0.57cm和1/77810,结果显示四等控制网精度要求和GPS控制网误差精度计算保持较高的一致性。
3.3 全站仪三角高程测量精度
对左、右两条路线严格按照规范要求利用全站仪三角高程同时进行野外作业测量,对向观测较差计算结果见表9。然后在测站高程面上将对象斜距进行改平计算,确定往返测边长较差最小值、最大值。

表9 对向观测较差 单位:mm
对1km高差中数偶然中误差MΔ采用对向观测高差进行计算,其表达式如下:
(3)
式中,S,d—对向观测距离及其高差不符值;n—对向观测边的个数。
1km高差中数偶然中误差在水电工程测量规范中为±10mm,且已经调整了高坎子测区高差的大地水准面的计算参数。按照四等水准的精度要求计算闭合环线高差闭合差允许值fh允=±122.85mm,本次测量中计算确定的闭合差fh=±35.80mm,由此表明采用三角高程测量时的计算精度能够符合四等水准要求。在GPS控制网平差计算过程中输入其他GPS点GPSF、GPSE、TC02、TC01、HN06和HN02高程,在改正地形的条件下对其他各点高程考虑选用曲面拟合法确定。经过拟合计算检验,确定的高程测量精度符合四等水准要求。另外,许多实验表明确保控制网内已知高程点的合理分布就可获得较高精度的拟合结果[11- 13]。
4 结论
高坎子电站工程的高程测量和GPS网布设较为科学合理,计算与观测的数据资料具有较高的可靠性。控制网高程精度和平面设计能够达到四等水准,且工程设计规划能够满足实际需要。实践表明,在地形复杂的山区水电工程控制网建立时GPS静态测量方式具有较强的可行性和有效性。为保证控制网及测点布设的可靠性,应严格按照标准规范实施,重复基线数和多余观测应符合10%、30%的要求。另外,工程实例再次验证了四等水准测量能够被全站仪测距三角高程替代,但在测量过程中应尽合理控制高差测量时间和对向观测的距离,最大限度地降低高差受大气折光的影响。
猜你喜欢
煤气与热力(2021年10期)2021-12-02
导航定位学报(2021年5期)2021-10-13
北京测绘(2021年1期)2021-02-05
装饰装修天地(2020年11期)2020-07-04
舰船电子对抗(2019年6期)2019-04-27
家庭影院技术(2018年11期)2019-01-21
中国绿色画报(2017年9期)2017-09-16
舰船电子对抗(2016年5期)2016-12-13
房地产导刊(2015年6期)2015-10-21
中国科技术语(2012年5期)2012-12-28
