
含一弹性索的二索并联机构动力学系统的Brunovsky正则形式
2020-04-22 09:36郑亚青杨永柏
科学技术与工程 2020年6期
郑亚青,杨永柏
(华侨大学大学机电及自动化学院,厦门 361021)
在过去的四十多年中,绳牵引并联机器人获得机器人学领域学者的广泛关注和研究兴趣。绳牵引并联机器人具有潜在的大工作空间,易被重组和使用,具有高速运动和高的质量负荷比等特性[1],使得其在天文观察、结构建造设备、救援、服务和康复以及多空中机器人等领域得到广泛应用。然而,绳牵引并联机器人也存在一定缺陷,即绳索必须被绷紧来产生作用在末端执行器上的力和力矩;且绳索柔性有时不能被忽略的,由于弹性索和末端执行器以及驱动器这三者的动力学之间存在非平凡的耦合,使得机构系统的动力学和末端轨迹控制问题变得非常复杂[2]。Gosselin教授提出一种2索牵引的平面并联机构(每根绳索被看成是一个无质量的刚性杆和一个线性弹簧组成),其动力学系统满足微分平坦性从而使轨迹跟踪控制问题变得易被解决[3]。
针对一种含一弹性索的二索牵引并联机构,推导该机构的动力学系统,并用微分代数方法及经准静态线性化反馈来线性化的一般性控制器形式,这两种方法推导获得与其对等的具有Brunovsky类型正则形式的线性化和解耦化的系统。这两种方法在本质上是一致的,都是在寻找原系统的一个微分k-同胚,然后在其基础上获得用新的状态坐标表示的与原系统对等的Brunovsky类型正则形式。两种方法的区别在于:研究工具和具体推导过程的存在差异,微分代数方法用微分域扩张表示机构动力学系统,而用代数闭合及微分闭合一致来获得与原系统对等的Brunovsky类型正则形式,这两个对等系统之间存在一个微分k-同胚[4];经准静态线性化反馈来线性化的一般性控制器形式方法是用无限维微分几何将机构系统的状态方程限制成呈一个块三角结构的、带有一般化的控制系数非线性控制器形式,通过对该非线性控制器采用一种特殊的准静态反馈,即可获得与原状态方程等价的具有Brunovsky正则形式的线性系统,这是微分代数方法的另一种表达[5]。前人针对该类型的机构,通过求解机构系统动力学的广义状态方程的输出函数关于状态量x的Lie导数以及输出函数和Lie导数关于输入量u的偏微分表达来寻找其微分同胚φ(x),并从φ(x)该微分同胚获取新状态坐标来推导出与原系统等价的具有Brunovsky类型正则形式的线性系统[6]。
采用的两种新的推导方法从不同的侧面来理解和阐释同一个问题,其中微分代数属于数学的一个分支;经准静态线性化反馈来线性化的一般性控制器形式方法属于非线性控制的内容,其与文献[6]所用的方法的区别在于:文献[6]采用Lie-Backlund映射求微分k-同胚。现采用第二种方法,并基于已有的利用微分几何取得的研究结论进行推导。
1 含一弹性索的二索并联机构动力学系统的状态空间表达
(1)
式(1)中:τ1为第一根绳的拉力值。
右方的那根绳索是无质量、长度为ρ2的刚性索。其中,
(2)
式(2)中:τ2为第二根绳的拉力值。
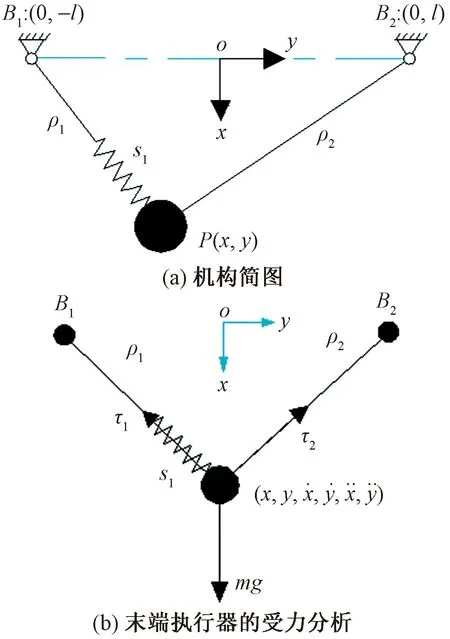
B1为滑轮1和绳连接点的坐标;l为坐标值;ρ1为绳1钢性部分长度
末端执行器的运动方程可用方程(3)、方程(4)表示:
τ1=ks1
(3)
τ2=τ2
(4)
(5)
(6)
(7)
根据式(3)~式(7),可获得逆动力学问题的解:
(8)
(9)
(10)
2 含一弹性索的二索并联机构动力学系统的Brunovsky类型正则形式之推导:微分代数方法
文献[4]利用微分代数知识,证明了一个用微分域扩张表示的平坦化良好动力学系统可通过准静态状态反馈获得一个与其对等的具有Brunovsky类型正则形式的线性化和解耦化的系统。首先定义几个微分域扩张,接着推导指出含1弹性索的2T绳牵引并联机构动力学系统是平坦化的良好动力学系统,然后推导获得与其等价的具有Brunovsky类型正则形式的线性系统。
2.1 微分域扩张
在微分代数方法中,机构动力学系统用微分域扩张来定义,系统变量如输入u,输出y和状态量x是代数对象,即一个域的元素,这些对象之间确定了系统的广义状态方程:
(11)
(12)
即
(13)
式(13)中:Ai为在k内的带有系数的多项式;k为给定的一个微分域,这定义了一个D/k〈u〉。
(2)给出一个线性化和解耦化的系统:
(14)
即
(15)
(16)
即
(17)

(18)
即
(19)

(20)
即
Gi(vi,ξ,u)=0,i=1,2
(21)
2.2 证明

(22)

3 含一弹性索的二索并联机构动力学系统的Brunovsky类型正则形式之推导
经准静态线性化反馈来线性化的一般性控制器形式的思路是:在选择合适的新状态坐标的基础上,利用无限维微分几何将机构系统的状态方程限制成呈一个块三角结构的带有一般化的控制系数非线性控制器形式,通过对该非线性控制器采用一种特殊的准静态反馈就可获得与原状态方程等价的拥有Brunovsky正则形式的线性系统。该方法是文献[6]所采用的非线性控制理论二线性化过程的另一种表达。
证明:


(23)
(24)
(25)
(26)
式(26)满足文献[5]中所提到的是带有一般化可控性系数的一般化非线性控制器形式,该控制器包含被函数终止的积分器链,这些函数代表系统的非线性且能通过正确的反馈被补偿,因为它们是被控制输入u直接被达到的。

(27)
(28)
式中:(A,B)是Brunovsky对。
4 基于微分代数方法和基于经准静态线性化反馈来线性化的一般性控制器形成的两方法比较
4.1 微分代数方法
利用文献[4]中的结论推导表明,以微分域扩张表示的机构动力学系统是一个平坦化的良好动力学系统,通过准静态状态反馈可获得一个与其对等的具有Brunovsky类型正则形式的线性化和解耦化的系统,这2个对等系统之间存在一个微分k-同胚。
4.2 经准静态线性化反馈来线性化的一般性控制器形式
利用文献[5]中的结论,在选择合适的新状态坐标的基础上,构造呈“块三角结构”且带有一般化的控制系数的非线性控制器,然后推导出与原机构动力学系统状态方程等价的拥有Brunovsky类型正则形式的线性系统。该方法是方法一的另一种表达。
两种方法在本质上是一致的,侧重点都是在寻找原系统的一个微分k-同胚,然后在其基础上获得用新的状态坐标表示的与原系统对等的Brunovsky类型正则形式;差异在于研究工具和具体推导过程的不同,如第一种方法用微分域扩张表示机构动力学系统而用代数闭合及微分闭合一致来获得与原系统对等的Brunovsky类型正则形式,第二种方法是用无限维微分几何将机构系统的状态方程限制成呈一个块三角结构的带有一般化的控制系数非线性控制器形式,通过对该非线性控制器采用一种特殊的准静态反馈就可获得与原状态方程等价的具有Brunovsky正则形式的线性系统。
5 结论
微分代数、经准静态线性化反馈来线性化的一般性控制器形式这两种方法都能推导获得与原机构系统动力学状态方程等价的具有Brunovsky正则形式的线性系统,因为两种方法本质上是一致的,侧重点都是在寻找原系统的一个微分k-同胚,然后在其基础上获得用新的状态坐标表示的与原系统对等的Brunovsky类型正则形式;差异在于研究工具和具体推导过程的不同。
猜你喜欢
贵州师范大学学报(自然科学版)(2022年5期)2022-11-18
煤气与热力(2021年6期)2021-07-28
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
兵器装备工程学报(2021年1期)2021-02-22
中等数学(2020年2期)2020-08-24
上海师范大学学报·自然科学版(2018年3期)2018-05-14
价值工程(2018年13期)2018-05-03
北京航空航天大学学报(2017年1期)2017-11-24
科技与创新(2017年3期)2017-03-17
