
飞机稳态失速螺旋特点仿真
2020-04-22 06:46陈柏松
科学技术与工程 2020年6期
徐 宇,陈柏松,潘 军
(空军航空大学航空作战勤务学院,长春 130022)
现有的飞行安全事故原因中,尾旋是导致严重飞行事故最常见的事故诱因之一。1995年后,空军部队共发生多起由于失速螺旋引发的各类飞行事故。失速螺旋已经成为引发飞行事故的主要原因之一[1]。为了确保飞机的飞行安全,必须对飞机的失速螺旋的特点进行深入研究,为部队飞行安全提供良好的理论支撑。
发达国家航空工业非常重视尾旋的研究工作,为验证各种型号飞机失速尾旋机动能力开展了大量的风洞试验[2],如美国国家航空航天局(National Aeronautics and Space Administration,NASA)兰利研究中心和德莱顿研究中心等。
目前,关于飞机失速机理、失速螺旋的特征以及改出研究还不够深入,模型自由飞试验尽管可以形象地获取飞机整个尾旋运动的全过程,然而在时间和经济上,其代价不仅惊人而且难度大[3],特别是针对尾旋状态的仿真较为缺乏。基于此,以某型飞机为例,对稳态失速螺旋特点进行研究。首先分析了失速螺旋的产生原因,根据基本运动学方程推导了尾旋运动的方程,将失速螺旋分为三个阶段进行研究,以某型飞机为例,针对尾旋过程建立了运动学模型,利用MATLAB/Simulink软件搭建实时仿真模型,开展研究,得到了相关图像,以期为稳态平螺旋运动提供参考。
1 失速螺旋产生原因
飞机的尾旋过程发生在失速之后,机体同时沿飞机三个体轴进行自转运动,同时重心沿小半径螺旋轨迹进行下降运动[4]。
由于来流方向急剧变化、操纵造成迎角α超过临界迎角和飞行速度过小,都有可能使得机翼迎角超过失速的临界迎角,导致飞机的机翼失速。操纵造成的失速如图1所示,来流方向变化造成的失速如图2所示,其中v为空速。

图1 操纵造成的失速

图2 来流方向变化造成的失速
螺旋现象是一种在机翼的上表面发生气流分离引发的升力急剧减小的现象。由于两侧机翼并不是完全对称的,因此左右机翼并非同时进入失速状态,这样就产生了滚转力矩,飞机进入自转状态。
飞机的自转是导致失速螺旋的主要诱因[5]。失速螺旋是飞机朝向失速的那一侧机翼方向,绕着飞机的纵轴旋转的一种不正常的飞行状态。自转这将导致两翼迎角不同而产生阻力差,左右两翼阻力差会造成偏航力矩,随着迎角进一步增大,升力系数继续下降,升力不足导致飞机下沉,之后当机翼升力不平衡造成的旋转力矩和飞机的阻尼力矩平衡时,飞机将绕着飞机纵轴作等角速度的螺旋运动[6]。
2 失速螺旋运动建模
失速螺旋包括进入、定常、改出三个阶段。
2.1 进入阶段
当机翼迎角到达临界迎角附近时(38°~43°),首先机翼会出现失速现象,飞机会发生滚转,滚转的同时飞机的航向也会发生变化,之后迎角进一步增大,飞机下沉,进入失速螺旋。
某型高级教练机机翼升力系数Cy和机翼迎角之间的关系如图3所示。

Cymax 为最大升力系数;δqj为前缘襟翼角度
尾旋过程中通常伴随着侧滑现象[7]。如果自转方向和侧滑方向不在同一侧,例如向左自转的同时发生右侧滑,则由于自转方向一侧机翼后掠角增加使得附面层的堆积分离更加严重,使得左右升力差增加,使自转角速度ωx增大,侧滑角为β。反之则使得自转角速度减小,如图4所示。

图4 侧滑对自转的影响
为了研究问题方便,只讨论无侧滑角的情况。
2.2 定常阶段
进入失速螺旋的第二阶段,可能出现两种螺旋情况。第一,气动力的水平分量和离心力,尾旋半径基本保持不变,做稳定的尾旋运动;第二,气动力提供的向心力大于离心力,尾旋半径越来越小。两种尾旋情况如图5所示。

图5 不同尾旋半径示意图
为了计算问题方便,这里主要研究尾旋半径不变的定常尾旋情况,实际飞行中的尾旋大多数也属于这种情况。
假设飞机的推力方向沿着飞机机体纵轴且通过飞机质心,不计发动机的动量矩,并且计飞机对应轴的惯性积均为零,在机体坐标系下,列出飞机的六自由度动力学方程为[8]
(1)
(2)
式中:m为飞机质量;vxt、vyt、vzt为地速v在机体坐标系中的分量;ωx、ωy、ωz为ω在机体坐标系中的分量;P为发动机推力;X为阻力;Y为升力;Z为侧力;θ为俯仰角;γ为滚转角;ψ为偏航角;Ix、Iy、Iz为飞行器转动惯量;Ixy为飞行器惯性积;
以欧拉角法表示飞机的运动学方程为[9]
(3)
角度和各个方向的速度关系式为
(4)
总角速度Ω为
(5)
对飞机的角速度进行分解:
(6)
式(6)中:p、q、r分别为各个方向的角速度;ωss为稳态分量,与旋转天平数据结合使用;posc、qosc、rosc为振荡分量,与振荡天平数据结合使用。
飞机进入定常尾旋阶段,其飞行速度v、旋转角速度ω、迎角α和侧滑角β均为常值,故作用在飞机上的力和力矩均处于平衡状态。此时作用于飞机上惯性力矩始终等于气动力矩,这时可视飞机为一质点处理。在气流分离的情况下,气动力R可认为垂直于翼弦。显然,定常尾旋时,气动力R的垂直分量与重力平衡,R的水平分量与离心力平衡,如图6 所示。

图6 气动力示意图
于是有平衡方程:
(7)
(8)
式中:G为飞机重力;ρ为空气密度;S为机翼面积;r为尾旋半径。可以求出尾旋的速度[10]:
(9)
也可以求出尾旋的半径r:
(10)
式(10)中:l为机翼翼展;ω为解速度。
每周损失的高度h和时间t分别为
(11)
(12)
其中:
(13)
2.3 改出阶段
尾旋的改出阶段,飞行员通过操纵舵面,使飞机的自转减慢,然后飞机的迎角减小进入俯冲,直至改出尾旋进入正常的飞行状态[11]。
改出螺旋的过程中,飞机仍然在自转下降,这个过程仍然有高度和时间上的损失,但是改出阶段只占很小的一段时间,高度损失不大,因此一般不计改出阶段的高度和时间损失,仿真结果如图7~图10所示。

图7 尾旋过程图

图8 尾旋周期高度测量

图9 尾旋高度变化曲线
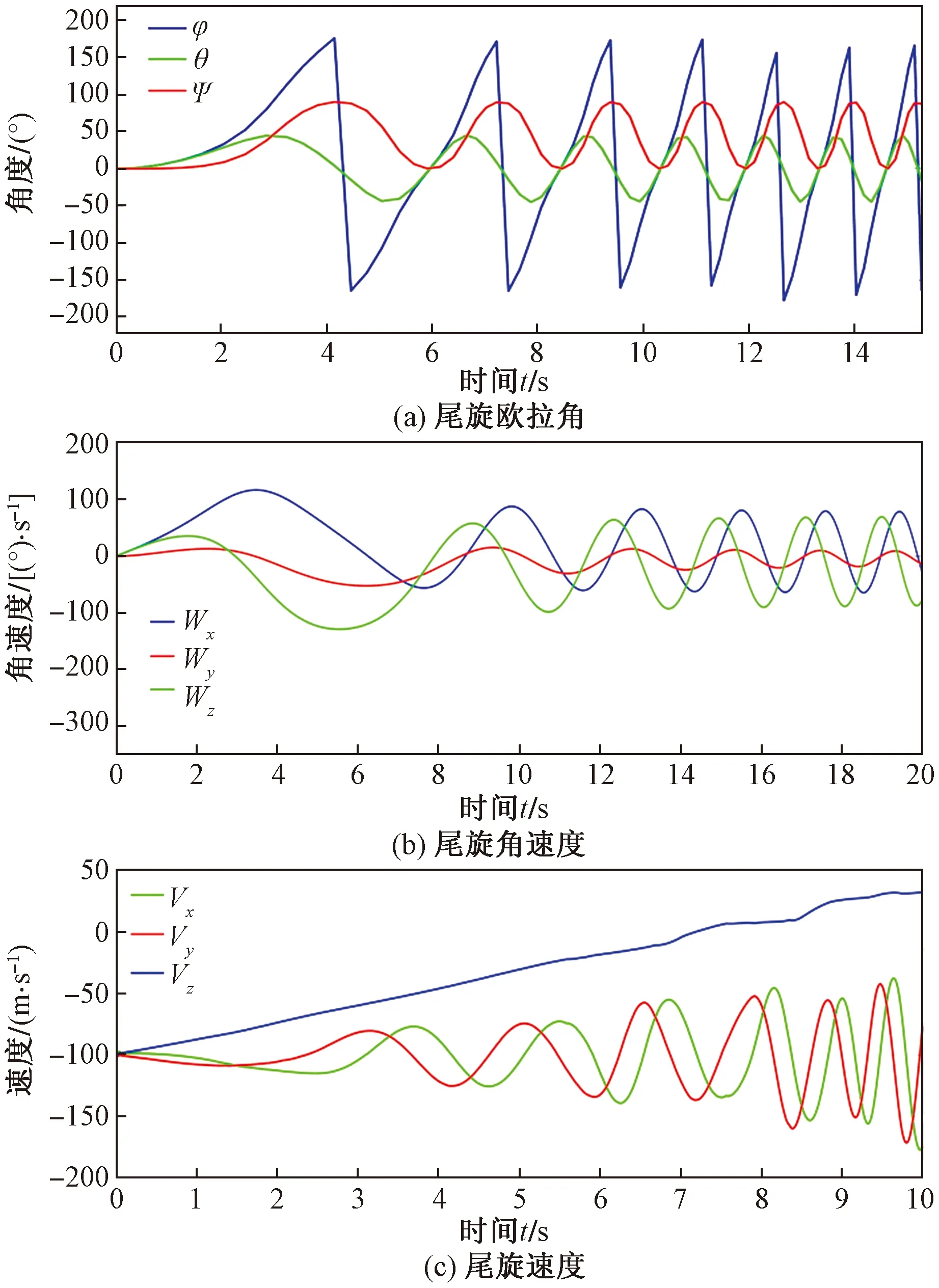
图10 尾旋各参数时域响应
进行与失速螺旋有关的计算时,可以只考虑第二阶段。以第二阶段的计算结果为代表,对第三阶段只进行力学分析。
3 失速螺旋计算分析
失速的根本原因是迎角到达了失速迎角[12]。在飞机飞行速度较小,杆力变轻的情况下,采用拉杆到底并保持的操作,造成拉杆超量、机动过载大的状况。进而引起飞机失速。
假设某高级教练机在6 000 m高度下,采用拉杆到底并保持的操纵方法,进入正飞尾旋模态下的稳定快速平螺旋。

4 结论
采用六自由度运动学方程,基于MATLAB/Simulink软件进行实时仿真,使用基于ode45的四点法和五点法的解微分方程数值解的方法,简化算法,优化模型,较好的模拟出某高级教练机进入稳态尾旋的实时状态,仿真结果与现有文献吻合,对于研究飞机稳态尾旋过程具有指导意义。主要结论如下。
(1)利用ode45方法求解非线性微分方程组,采用变步长四、五阶Runge-Kutta-Felhberg法,提高计算精度,保证仿真模型的实时性,结果真实有效。
(2)仿真模型进入螺旋约4 s后保持稳态平螺旋,欧拉角、角速度、速度参数呈现周期性变化,模型状态稳定,仿真结果较好且理想。
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
北京航空航天大学学报(2021年6期)2021-07-20
空间科学学报(2020年4期)2020-04-22
科学Fans(2019年4期)2019-04-30
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
北京航空航天大学学报(2016年3期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
科技传播(2014年4期)2014-12-02
少年科学(2014年7期)2014-08-18
