混合动力挖掘机电动回转系统速度控制研究*
2020-04-24 01:26韩素贤时盛志
机电工程 2020年4期
韩素贤,姚 洪,时盛志
(1.包头职业技术学院 电气工程系,内蒙古 包头 014030;2.杭州西湖新能源科技有限公司,浙江 杭州 310012;3.宁夏和宁化学有限公司,宁夏 银川 751400)
0 引 言
近年来,随着全球气候变暖、环境恶化等问题日益严重,各行各业都对产品在节能减排方面提出了严苛要求。工程机械在能耗和排放方面的问题尤为突出,尤其是液压挖掘机,其工况复杂、载荷波动剧烈,从而导致油耗高、排放差等问题。因此,各大工程机械生产商和研究机构提出了混合动力类型的挖掘机[1-3]。例如,日本KOMATSU公司已经研发出了混合动力液压挖掘机[4]。
混合动力挖掘机采用发动机和电动机两种动力源并行驱动液压泵,虽然液压泵载荷波动剧烈,但电动机对液压泵负载进行“削峰填谷”式的补偿,使得发动机工作点运行平稳,并且始终处于高效区,因此具有一定的节能效果。此外,混合动力系统以超级电容为辅助动力源,因此采用电机替代液压马达来驱动回转平台成为另一可行的节能方案。因为电机驱动的效率比阀控马达系统传动效率高,而且在转台减速时可以通过电机制动使转台动能得以回馈,混合动力挖掘机转台回转采用电机驱动方案能进一步提高系统效率[5-6]。
挖掘机作业时,回转动作频繁,起制动时间短,单次回转作业时间只有几秒,因此,电驱动回转系统必须满足速度控制响应快、超调量小以及运行平稳的要求。但是转台的转动惯量随挖掘机姿态不同以及铲斗中物料量的多少而大范围变化;此外,在斜坡作业时,转台重力在斜坡上的分量产生的干扰扭矩大,这些因素易造成回转速度波动,不利于保证回转的操控性和舒适性。
挖掘机电机驱动回转系统的文献报道较少,文献[7-9]对电机驱动回转系统设计、建模和参数选择方面作了介绍。但挖掘机电动回转系统的本质是变参数、强干扰的电机速度控制问题,这方面的研究报道较多。JIN K[10]采用了滑模控制方案来解决了挖掘机回转系统变参数引起的转速振动的问题;陆豪[11]采用了u综合鲁棒控制方法来解决电机驱动大惯量低刚度负载的位置控制问题;针对三轴飞行仿真转台模型参数变化、外部扰动和摩擦非线性的问题,王卫红[12]提出了前馈控制+自适应增益调整的方法,实现了高精度转速控制;YAO B[13]提出了非线性自适应鲁棒控制算法来解决直线电机精密运动控制中变参数、非线性摩擦力、未建模动态和饱和非线性等问题。以上文献中的控制策略都能很好地解决电机驱动系统的大惯量、变参数和强扰动问题,但需要大量计算,对控制器硬件的性能要求较高。
笔者在文献[14]中给出了电机驱动回转系统的结构和控制框架,并对系统的节能效果作了评价,但是速度控制仅采用了PI调节器,并未作深入研究。
本文针对变参数、强干扰速度问题,提出基于扰动观测器(DOB)的控制策略,并且该算法计算简单,适合在挖掘机普通性能控制器上实现。
1 系统结构
电机驱动回转系统由回转平台、目标转速信号单元、电机控制单元、制动单元、系统监控单元组成,如图1所示。

图1 混合动力挖掘机回转系统结构图
回转平台由永磁同步电机通过行星减速器直接驱动;制动单元包括制动油缸、电磁阀和制动器,制动单元的作用是在转台停止旋转时,锁住转台以防受到外界干扰力矩的作用而自由旋转,从而造成危险。目标转速信号单元包括压力传感器、操作手柄、齿轮泵及液压油箱,压力传感器安装在操作手柄先导阀的出口处,检测先导压力并由控制器转换成对应的电机目标转速,用于转台速度控制。电机控制单元包括永磁同步电机及控制器、编码器和超级电容,超级电容通过电机控制器连接到永磁同步电机,电机驱动转台旋转时,工作在电动模式,由超级电容向电机供电;当转台减速或制动时,电机工作在发电模式,把转台动能转化为电能向超级电容充电。系统监控单元主要是通过CAN总线网络把主控制器、电机控制器和超级电容单元连接起来,以实现系统参数的监测与控制。
2 系统建模
2.1 转台
(1)
式中:TD—减速器输出扭矩;B—阻尼比;J—回转部分的等效惯量,文献[15]通过试验测试所得电机侧等效惯量变化范围0.8 kgm2~2.2 kgm2;dω/dt—转台的加速度;Tf—转台传动系统所受的等效摩擦阻力矩;Tg—干扰力矩,包括转台在斜坡上,由重力产生的干扰力矩和铲斗与外部环境作用产生的力矩。
2.2 减速器
TD=i·TE
(2)
式中:TE—电机输出轴上的驱动转矩;i—减速器传动比。
2.3 电机
永磁同步电机采用矢量控制方式,电机扭矩控制系统结构如图2所示。
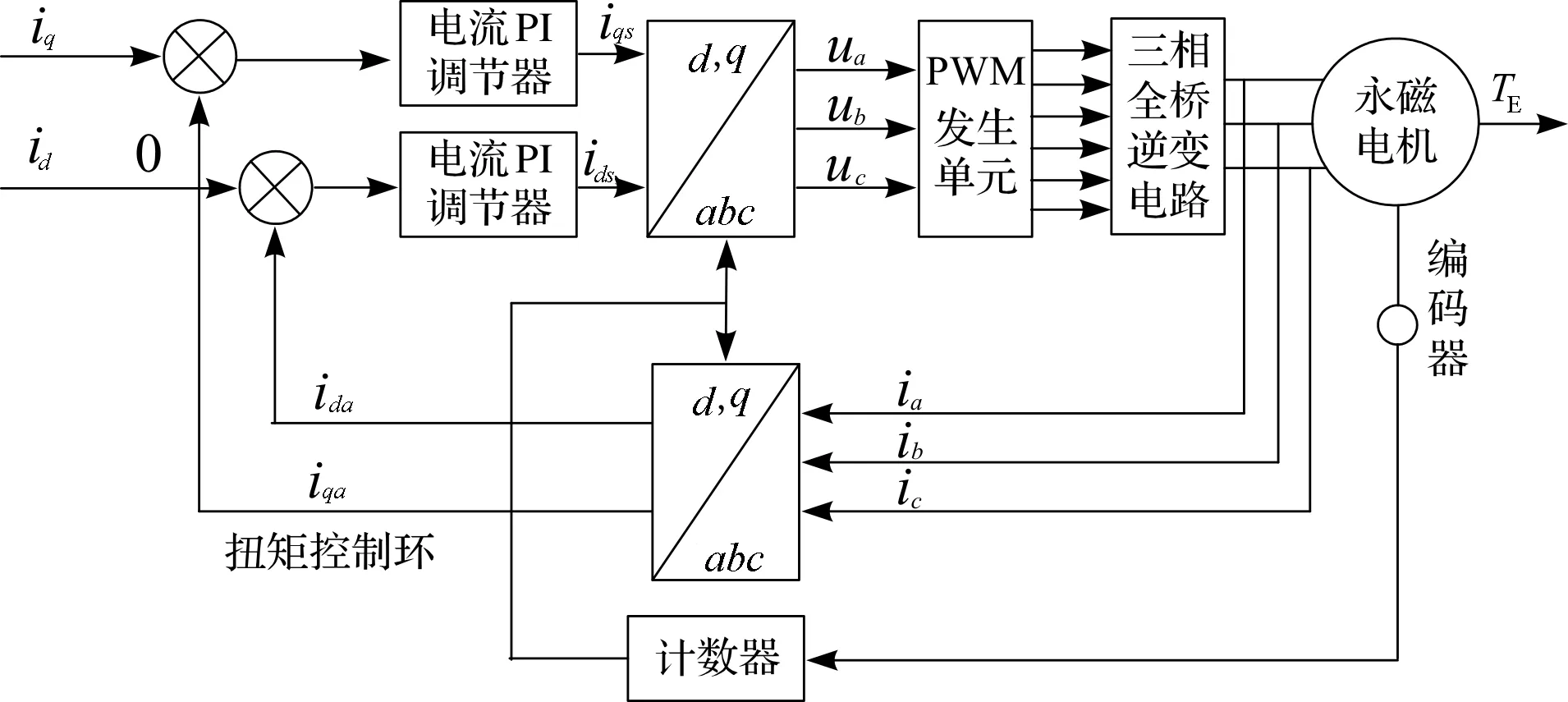
图2 永磁同步电机扭矩控制系统结构图
该系统实时检测三相电流ia、ib和ic,经Clark变换将其从三相静止坐标系变换到两相静止坐标系,再与转子位置结合,经过Park变换从两相静止坐标系变换到两相旋转坐标系交直轴电流ida和iqa;交、直轴参考电流id与iq与坐标变换得到的电流进行比较,采用id=0的控制方式,再经过PI调节器,交直轴控制电流ids和iqs,结合转子角位置进行反Park和Clark反变换得到ua、ub和uc,再经过SVPWM模块调制为6路开关信号,从而控制三相逆变器的开通与关断。
采用以上的控制方式后,定子电流中只有交轴分量,且定子磁动势空间矢量与永磁体磁场空间矢量正交,电机稳态输出转矩与定子电流成正比,且扭矩响应时间只有几毫秒,所以相对于转台的大惯性时间常数,可以忽略电机的扭矩响应的动态过程。将电机扭矩环视为比例环节,得到电机扭矩简化模型式为:
TE=k·iq
(3)
式中:TE—电机的输出转矩;k—比例系数;iq—直轴控制电流。
2.4 系统模型
电机驱动回转系统的模型为:
(4)
该模型为变参数系统,令:
(5)
式中:Td—系统的外部干扰力矩。
3 控制策略
转台转速采用转速-转矩双闭环控制方案,系统结构框图如图3所示。

图3 转速双环控制方案
图3中:外环为转速控制环,内环为电机扭矩控制环,因此本文的重点是对速度控制器K进行研究。
转速闭环控制实现对目标转速的跟踪,为使速度控制而不受转台惯量变化和外部干扰转矩的影响,笔者提出采用扰动观测器(DOB)来抑制这些因素对转速的影响。文献[16]指出扰动观测器能有效解决干扰和模型参数不确定性等问题,提高系统的鲁棒性,被广泛应用到速度、位置控制系统中。
采用DOB补偿的速度控制方案如图4所示。
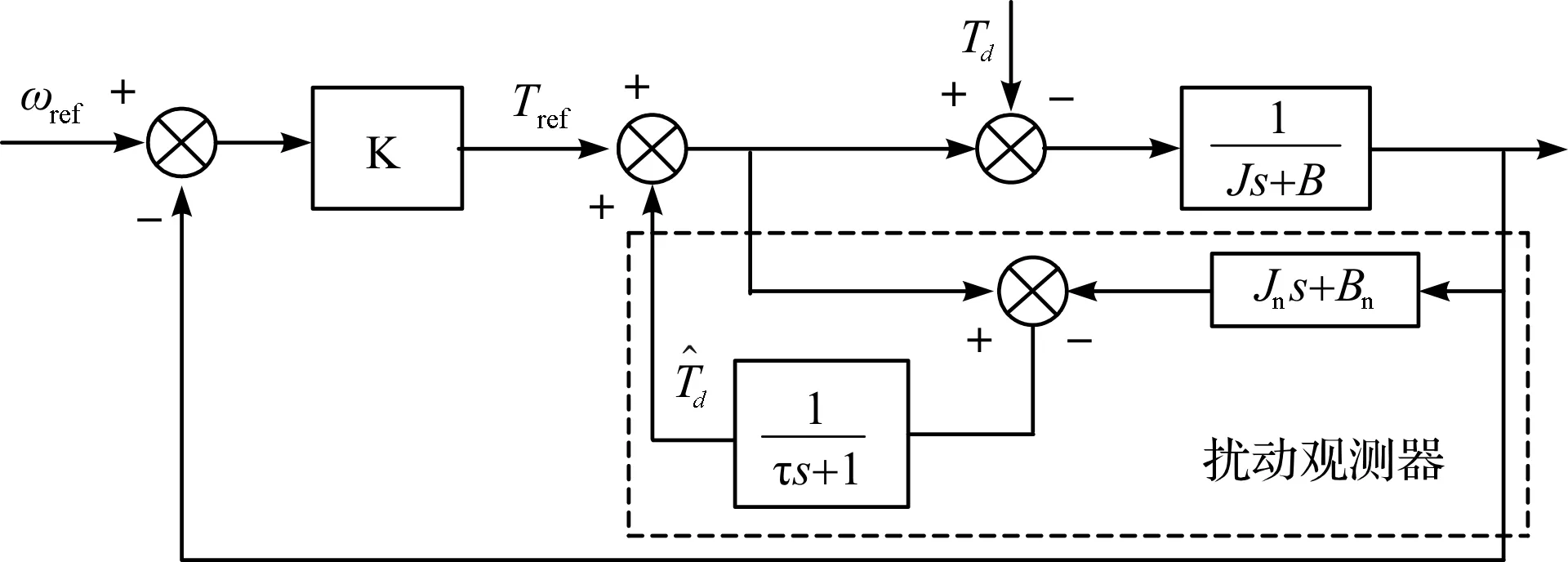
图4 基于扰动观测器的速度控制
图4中:虚线框内为扰动观测器(DOB)。因此,控制器设计主要包括扰动观测器(DOB)和主控制器K的设计。
3.1 扰动观测器设计
本研究将图4中主控制器之外的部分单独分析,并将系统模型做等价变换,扰动观测器等价变换图如图5所示(其中虚线框内是扰动观测器结构图)。

图5 扰动观测器等价变换Tref—主控制器的输出转矩;Td—干扰转矩;ξ—测量干扰;φ—模型参数变化引起的干扰转矩;补偿转矩;Q-滤波环节

(6)
式中:Jn—名义转动惯量;Bn—名义阻尼比。
实际系统中,在参数变化及外部干扰的作用下,能否通过预估的V来抵消的关键在于扰动观测器中Q的设计,具体说明如下:
将实际模转化成下式:
(7)
并引入ξ测量干扰信号,则可得到下式:

(8)
对式(8)进行分析:希望通过设计Q(s),使得Td和φ对输出没有影响;而参数变化以及外部干扰都属于低频信号,为了对低频信号充分抑制,在低频段希望Q(s)≈1;而测量噪声ξ大多处于高频段,为了对高频噪音能很好抑制,则Q(s)≈0,则可以得到理想的模型,如下式所示:
ω≈PnTref
(9)
因此,滤波器Q(s)设计为:(1)低通滤波器,低频段近似于1,消除控制对象模型摄动及外部干扰的影响;(2)高频段,Q(s)接近于0,达到抑制高频测量噪声的目的;(3)间常数τ是能影响扰动观测器动态性能,因此τ的具体值需要试验比较。
按照以上设计原则,所设计的Q(s)为:
(10)
3.2 主控制器
扰动观测器的引入并不影响系统的传递函数,因此可以按名义系统来设计主控制器K。主控制器K采用PI控制,取等效惯量中间值得到系统模型,采用极点配置法得到主控制器系数:P=0.2,I=0.01。
4 仿真分析
为验证以上所提出控制方案的可行性,笔者搭建Matlab/simulink仿真系统,对比PI控制和PI控制+DOB补偿两种方案在转速控制方面的性能差别。仿真条件为:J=0.8 kgm2和J=2.2 kgm2两种惯量,阶跃干扰100 Nm,目标转速设为先匀加速、再匀速、最后匀减速,加减速时间均为3 s,转台目标转速为9.375 r/min。
仿真结果如图6所示。

图6 不同惯量和阶跃干扰下速度扭矩曲线
图6中:
(1)PI控制。转台实际转速能跟踪目标转速,但惯量变化对转速超调量影响较大,惯量J=2.2 kgm2和J=0.8 kgm2时超调量分别为4.1%和1.0%,惯量变化对超调量的影响为3.1%,这是由于模型参数变化所导致的;在阶跃干扰下转速有明显波动,惯量J=2.2 kgm2和J=0.8 kgm2时,干扰扭矩为100 Nm不变,转速波动量分别为3.2%和1.9%,干扰量对转速波动的影响1.3%。因此,采用单一PI控制器,系统转速不稳定,影响转台的操控和舒适性。
(2)PI+DOB控制。转台转速跟踪目标转速,惯量变化对转速超调量影响较小,惯量J=2.2 kgm2和J=0.8 kgm2时超调量分别为2.6%和1.6%,惯量变化对超调量的影响为1.0%,这主要取决于PI调节器参数的选择;惯量J=2.2 kgm2和J=0.8 kgm2时,干扰扭矩为100 Nm不变,转速波动量分别为1.2%和1.1%,外部干扰对转速波动的影响为0.1%。
相对于PI控制,转速波动明显减弱,这是由于DOB环节感知实际模型参数相对于名义模型的变化和外部干扰,产生了补偿作用,从而使得转台转速比较一致,系统具有较好的操控和舒适性。
5 结束语
采用电机替代液压马达驱动挖掘机回转平台是混合动力挖掘机的一项有效节能措施,但是由于转台惯量大、变化范围大,且受到外界干扰力矩时转速波动明显,容易影响回转作业的操作性,针对该问题,本文建立了系统模型,测试了转台等效惯量的变化范围,提出了PI+扰动观测器的控制方案,搭建了系统仿真模型,在最大和最小等效惯量时,并施加阶跃干扰力矩的情况下,对回转速度控制系统仿真。
仿真结果表明:采用PI控制,转台实际转速能跟踪目标转速,但是惯量变化对转速超调量影响较大,并且干扰作用下转速波动明显,而PI+DOB控制中,DOB环节感知实际模型参数相对于名义模型的变化以及外部干扰,产生了补偿作用,使转台惯量变化对转速超调量的影响从3.1%下降到1%,外部干扰对转速波动的影响从1.3%下降到0.1%。
因此,扰动观测器环节减小了惯量变化对转速超调的影响,增强了速度控制的抗干扰能力,改善了回转作业的操作性,并且该控制策略结构简单,容易在挖掘机普通性能控制器上实现。
参考文献(References):
[1] MASAYUKI K. The development of an 8 ton class hybrid hydraulic excavator SK80H[J]. KOBELCO Technology Review, 2013,31(1):6-11.
[2] MANABU E, SEIJI I, SHINYA I, et al. Adoption of electrification and hybrid drive for more energy-efficient construction machinery[J]. Hitachi Review, 2013,62(2):118-122.
[3] INOUE H. Introduction of PC200-8 hybrid hydraulic excavator[J]. KOMATSU Technical Report, 2008,54(161):1-6.
[4] INOUE H, YOSHIDA H. Development of hybrid hydraulic excavators[J]. International Journal of Automation Technology, 2012,16(4):516-520.
[5] WANG Q F, ZHANG Y T, XIAO Q. Evaluation for energy saving effect and simulation research on energy saving of hydraulic system in hybrid construction machinery[J]. Chinese Journal of Mechanical Engineering, 2005,41(12):135-140.
[6] ZHANG Y T, WANG Q F, XIAO Q. Simulation research on energy saving of hydraulic system in hybrid construction machinery[C]. Proceedings of the Sixth International Conference on Fluid Power Transmission and Control, Hangzhou:ICFP,2005.
[7] 邢树鑫,林明智,戴群亮.混合动力挖掘机回转系统设计[J].工程机械,2010,41(12):38-40.
[8] 成 凯,张 俊,王鹏宇,等.混合动力挖掘机回转系统仿真模型的建立与分析[J].建筑机械,2011(6):81-86.
[9] 郭 浩,王 辉,吴 轩,等.混合动力挖掘机电回转系统储能容量的优化配置[J].中国机械工程,2016,27(12):1572-1578.
[10] JIN K, PARK T, LEE H. A control method to suppress the swing vibration of a hybrid excavator using sliding mode approach[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2012,226(5):1237-1253.
[11] 陆 豪,李运华,田胜利,等.驱动大惯量低刚度负载的推力矢量控制电动伺服机构的u综合鲁棒控制[J].机械工程学报,2011,47(2):180-188.
[12] 王卫红,姚志超,郑连强,等.三轴飞行仿真转台自适应复合控制方法[J].电机与控制学报.2011,15(9):74-79.
[13] YAO B. Advanced motion control from classical PID to nonlinear adaptive robust control[C]. Proceedings of the 11th IEEE International Workshop on Advanced Motion Control, Nagaoka:IEEE,2010.
[14] 韩素贤,姚 洪,魏毅立.混合动力挖掘机电机驱动回转系统设计[J].电气传动,2018,48(3):47-50.
[15] 姚 洪.混合动力挖掘机电机驱动回转系统的控制及节能研究[D].杭州:浙江大学机械工程学院,2015.
[16] 樊玉华.分数阶干扰观测器研究[D].大连:大连交通大学电气信息学院,2007.
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年4期)2020-12-25
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
中国惯性技术学报(2018年1期)2018-05-10
北京航空航天大学学报(2017年6期)2017-11-23
铁道科学与工程学报(2015年5期)2015-12-24
中北大学学报(自然科学版)(2015年6期)2015-12-02