
雷达导引头抗有源压制干扰技术研究
2020-05-08 03:15磨国瑞
火控雷达技术 2020年1期
杜 勇 尚 煜 磨国瑞
(西安电子工程研究所 西安 710100)
0 引言
雷达导引头是一种以提供精确制导信息为主要作战使命的雷达设备,其一般安装在导弹的前部,主要功能包括搜索、识别、截获和跟踪目标,并输出制导信息。雷达导引头作为精确制导控制回路的敏感部件,其性能的优劣直接关系着制导以及导弹打击的成败。
随着电子技术的不断发展,尤其是小体积固态功放的发展与应用,雷达导引头的体积、重量越来越小,制导精度越来越高,主动雷达导引头越来越受到人们的关注。与此同时,雷达导引头所面临的战场环境也日趋恶劣,各种干扰手段层出不穷。尽管绝大多数雷达导引头都采取了低截获设计,但是仍然容易被干扰。
根据雷达导引头的作战使命,结合导弹的各种制导率分析,在作战过程中,角度闭环跟踪的稳定性显得尤为重要。本文即以此为出发点,以角度稳定闭环跟踪输出制导信息为切入点,探讨一种工程实用的雷达导引头抗有源压制干扰技术。
1 有源压制干扰信号模型[1-2]
有源压制式干扰就是通过发射大功率噪声或类似噪声的干扰信号遮盖或淹没目标回波,阻碍雷达正常的目标检测过程,以期达到干扰雷达正常工作的目的。有源压制干扰的基本原理是:通过干扰机发射大功率噪声进入雷达接收机,抬高雷达接收系统的噪声电平,降低回波中的有用信号能量与噪声能量的比值(即信噪比),造成雷达检测目标困难甚至检测不到目标,达到干扰雷达正常工作的目的。
相关研究表明,压制式干扰能够干扰任何类型的雷达信号,而最佳干扰波形就是随机性最强或不确定性最大的波形,由于高斯白噪声具有最大随机性与不确定性,因此利用高斯白噪声调制形成的压制式干扰是雷达对抗中经常用到的干扰样式。
根据干扰方式,可将有源压制干扰分为射频噪声干扰、噪声调幅干扰、噪声调频干扰和噪声调相干扰。其中射频噪声干扰的功率电平较低,难以满足实战需求;噪声调幅干扰是窄带干扰,只适用于瞄准式干扰;噪声调频干扰主要产生宽带压制干扰信号,因此在雷达对抗中应用广泛,是一种极其重要的压制干扰方式;噪声调相干扰通过调制电压的变化来调制载波的瞬时相位,应用相对较少。下文主要介绍噪声调频干扰信号模型。
雷达通过对回波的检测来发现目标并测量估计目标参数,压制干扰就是利用干扰机发射噪声干扰信号淹没回波中的有用信号,达到破坏或阻碍雷达正常的目标检测过程。雷达接收回波信号过程如图1所示,图1中ST(t)是雷达发射信号,s(t)是雷达回波信号,c(t)是雷达接收过程中除目标回波以外的各种噪声和干扰信号,sR(t)是接收机接收到的信号。

图1 雷达回波接收框图
如果载波的瞬时频率随调制电压的变化而变化,而振幅保持不变,则这种调制称为调频。当调制电压为噪声时,则称之为噪声调频,其信号形式为

(1)
式(1)中:调制噪声Un(τ)是均值为0、方差为σ2的高斯限带白噪声;φ(t)为[0,2π]均匀分布、且与Un(τ)独立的随机变量;KFM为比例系数,表示单位调制信号强度所引起的频率变化。
雷达接收到的干扰信号数学表达式为
(2)
信号仿真一般使用表达式(3)~(5),w0=2πf0为雷达工作的角频率。
(3)
(4)
(5)

噪声调频干扰,干扰信号频率覆盖范围较宽,是产生雷达宽频带干扰的主要方法,可用来产生阻塞式干扰,便于同时干扰频率分集雷达、频率捷变雷达和多部不同工作频率的雷达,具有以下一些特性:
1)干扰信号带宽大,幅度动态范围小,功率利用率高。
2)调制噪声的概率密度为高斯分布时,噪声调频干扰的功率谱密度分布也近似满足高斯分布。
3)干扰信号总功率与载波功率相等,而与调制噪声功率无关。
4)干扰信号带宽与调制噪声带宽和载波频率都无关,而取决于调制噪声的功率和调频系数。
根据干扰信号中心频率fJ、干扰信号带宽BJ相对于雷达接收机中心频率f0、雷达接收机带宽Br的大小关系,压制干扰可分为瞄准式、阻塞式和扫频式干扰。
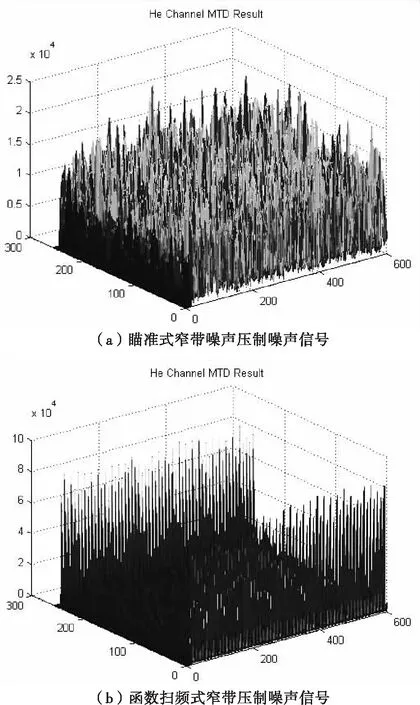
图2 两种压制噪声信号
1)瞄准式:fJ≈f0,BJ=(2~5)Br
3)扫频式:BJ=(2~5)Br,f0=fJ(t),t∈[0,T],即干扰信号中心频率是连续的周期为T的函数。
实际对抗中,干扰机可根据具体雷达的载频调制情况,对以上基本的干扰形式进行组合,如多频点瞄准式干扰、分段阻塞式干扰、扫频锁定式干扰等。
2 雷达导引头抗压制干扰能力分析
理论上,雷达导引头在其工作的各个阶段,都可能受到来自各方面的电磁干扰,不同的干扰样式对雷达导引头工作过程的影响也不尽相同。下文将对雷达导引头抗噪声压制干扰的能力进行分析[3-4]。
噪声压制干扰主要是通过抬高背景噪声,淹没有用信号,降低信噪比,达到干扰雷达正常工作的目的。某种意义上而言,雷达导引头抗噪声干扰的技术手段就是提高信噪比。
目前,雷达导引头普遍采用相参脉冲多普勒体制,也就是说,雷达导引头天生就具备一定的抗噪声压制干扰能力。但是随着大功率器件技术的发展,干扰机发射干扰信号等效功率可以很大(30-50 dBW),干信比足以抵消信号处理所带来的得益。
图3为脉冲多普勒体制雷达的信号处理框图。

图3 信号处理框图
图3中,脉冲压缩(PC)和动目标检测(MTD)能提高有用信号能量,是信号处理得益的主要来源。以某雷达导引头为例,表1罗列出其使用的信号及对应信处的增益。
也就是说,该雷达导引头在工作过程中,考虑13 dB的信噪比检测门限,若释放干噪比不大于34 dB的噪声压制干扰,有用信号经过脉冲压缩(PC)和相参积累后,目标回波信号不会被淹没,目标检测信噪比大于13 dB。
若信处总的处理得益为G(dB),信号处理可检测目标的信噪比门限为D(dB),那么当干噪比JSR(dB)≥(G-D)时,噪声压制干扰能有效淹没有用信号,达到干扰雷达导引头正常目标检测的目的。
表1 某雷达导引头信号参数及处理增益
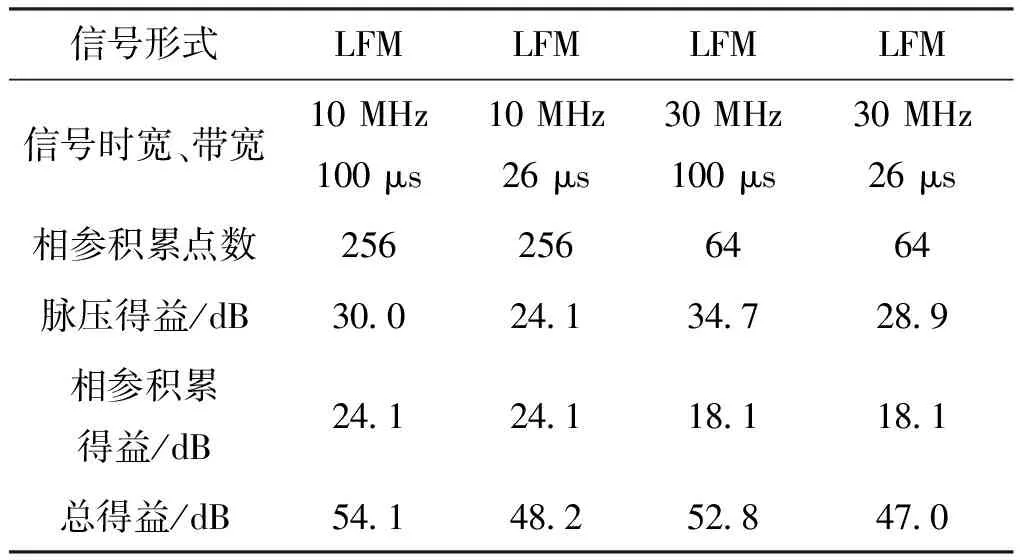
信号形式LFMLFMLFMLFM信号时宽、带宽10 MHz100 μs10 MHz26 μs30 MHz100 μs30 MHz26 μs相参积累点数2562566464脉压得益/dB30.024.134.728.9相参积累得益/dB24.124.118.118.1总得益/dB54.148.252.847.0
3 雷达导引头抗压制策略设计
雷达导引头在正常捕获目标后,对目标进行距离、速度二维跟踪,并实时输出方位/俯仰角误差(或角速度)对伺服平台进行稳定闭环跟踪。在干扰机释放压制噪声干扰时,有用信号被淹没,信干噪比SJNR达不到检测门限,目标丢失,雷达导引头进入重新搜索模式。由于噪声压制的存在,重新搜索过程中,目标也不会重新被检测,制导失败。
雷达导引头的主要作战使命是给导弹提供稳定可靠的制导信息,结合各种制导率分析可知,角度闭环跟踪的稳定性要比对目标稳定测距、测速要重要的多,换言之,只要保证角度跟踪的稳定性,就能保证制导信息输出的稳定性,保证制导的连续性。另外,由于干扰释放的不确定性,雷达导引头要保证在干扰消失后,能及时进行判决,恢复到正常的目标检测状态,并对其进行稳定的探测跟踪。
根据上述分析,本文设计如下策略,来应对噪声压制干扰对雷达导引头工作的影响:
1)总体思路:压制干扰释放期间,采用“干扰源”跟踪保证角度闭环的稳定性;距离根据惯导速度进行递推,雷达检测波门根据目标最大运动速度进行递推。
2)干扰检测:实时监测背景噪声,以及波门内的CFAR检测背景门限;当背景噪声电平Noise1与无干扰Noise0时噪声电平高出Th(dB),且CFAR检测背景门限也出现异常抬高,可判定有干扰;反之,背景噪声为出现较大起伏,目标能正常检测,可判定为无干扰。
3)信号处理控制:若判定出现干扰,降低CFAR检测固定门限,降低CFAR检测的增益Kvalue,控制信处不进行脉压处理;若判定干扰消失,则将信处参数恢复至干扰前的状态。
4)发射信号:为保证干扰消失后雷达探测威力,及对原目标的正常检测,发射波形及发射功率在干扰释放期间保持不变。
4 试验验证
按照前文分析及所设计的抗压制干扰策略,作者利用某雷达导引头,使用干扰模拟设备开展了相关的验证试验。干扰模拟设备采用双通道分别模拟目标回波和噪声压制干扰,并在末端通过功率合成方式,射频辐射输出。
干扰信号释放前,雷达导引头稳定跟踪目标并输出制导信号;干扰释放后,目标回波噪声电平被“抬高”,信噪比下降,雷达导引头工作状态由“正常跟踪”与“记忆跟踪”来回切变。当系统干扰判决生效后,导引头跟踪信号由目标回波,切换至“干扰源”后,系统切换至“稳定跟踪”状态,并实时输出制导信息。
在干扰释放后较短的时间内,目标幅度、单脉冲测角误差会恶化,一方面是由于目标检测信噪比降低,另一方面所由于抗干扰措施要滞后于干扰判决,即确定干扰类型后,才能采取对应的抗干扰措施,抗干扰措施起效相当于干扰释放有滞后。如图4、图5所示,干扰模拟设备输出目标静止,周期性释放600 MHz调频瞄准式宽带噪声干扰,干噪比50 dB。

图4 静止目标跟踪“距离-状态”图
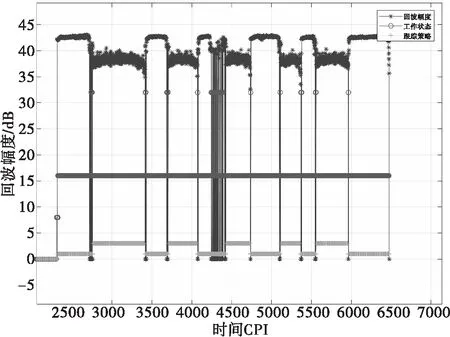
图5 静止目标跟踪干扰策略及工作状态监测图
如图6、图7所示,干扰模拟设备输出目标从40 km处以200 m/s速度运动,周期性释放函数扫频式压制干扰,锯齿波扫频,带宽600 MHz,扫频斜率2 MHz/s,干信比50 dB。雷达整个过程未出现目标跟踪丢失或者重搜索现象,工作状态切换符合预期设计。雷达受干扰期间,由于没有信号处理增益,信号幅度会有所降低,但不影响系统对“干扰源”的跟踪与闭环,且干扰消失后,系统能迅速捕获目标并退回到正常跟踪状态。
5 结束语
本文从雷达导引头的作战使命出发,提出一种“干扰源”跟踪方法来保证雷达导引头在受有源压制干扰期间稳定输出制导信息,从其原理上不难看出,该方法能有效应对舷上压制干扰,当导引头受到舷外干扰时,该方法就显得力不从心了。
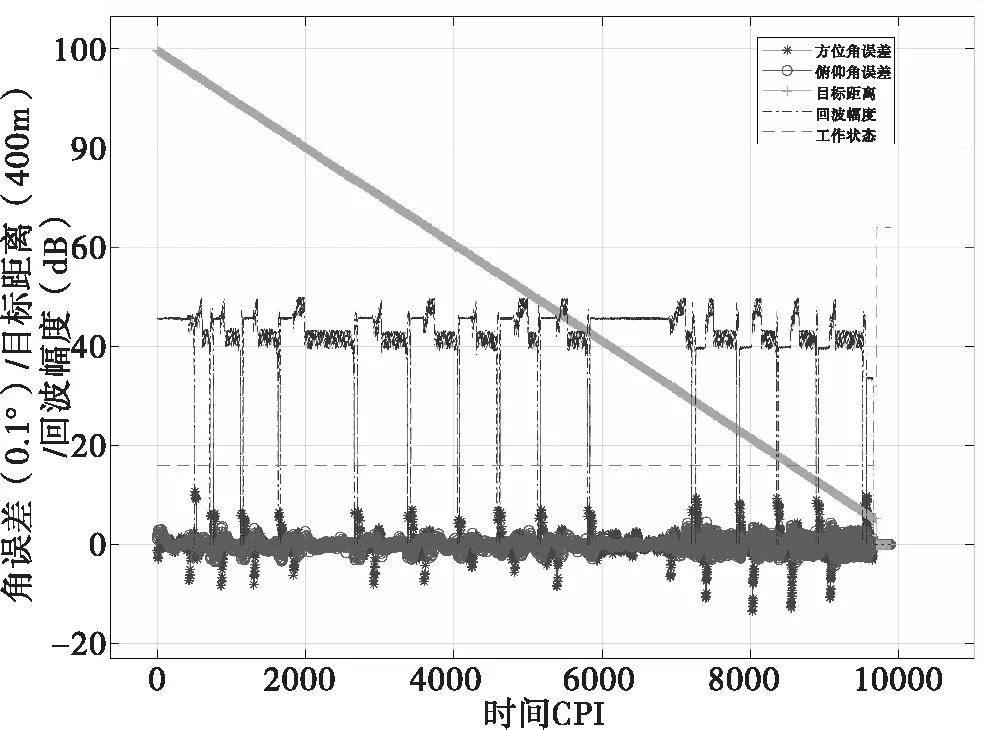
图6 运动目标跟踪“距离-状态”图
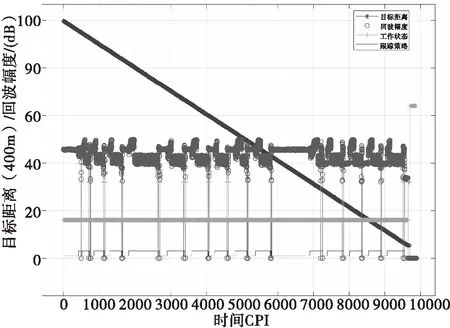
图7 运动目标跟踪干扰策略及工作状态监测图
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
计算技术与自动化(2022年2期)2022-07-04
海军航空大学学报(2021年1期)2021-09-01
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
软件导刊(2015年8期)2015-09-18
电子技术与软件工程(2015年6期)2015-04-20
电子竞技(2014年5期)2014-03-26
