
智能垃圾收集机器人
2020-05-08 10:45王克强高悦波侯志辉曾衍鑫孔镇清郑志杰
装备维修技术 2020年22期
王克强 高悦波 侯志辉 曾衍鑫 孔镇清 郑志杰

摘 要:随着国民生活水平的提高,生活垃圾的数量也以惊人的速度在增长。以广州市为例:一天要产生的垃圾就高达2.8万吨,以10吨运载量的卡车为准,则需要2800架次,才能将一天的垃圾运到处理场地,同时需要大量的环卫工人配合工作。在工业4.0和物联网技术日益渗透到日常生活的今天,这种人力配合运输车的垃圾转运模式不仅耗费大量的人力、物力,也因为工人习惯将可回收垃圾及不可回收垃圾混合到运输车辆,而使资源不能得到高效回收。因此“智能垃圾收集机器人”应运而生。
关键词:人工智能;垃圾收集
广州市等一线、二线城市每天产生的生活、商业垃圾数量巨大,以传统模式处理这些垃圾需要耗费大量的人力、物力,且转运效率太低,且传统的人工转运垃圾模式存在人工混合已分类垃圾的情况,使本可回收的资源被低回报地消耗。因此作者研究一种 “智能垃圾收集机器人”,旨在使用自动化机械设备协同工作和“机器学习”技术相配合,配合“人工智能”的时代潮流。解决了垃圾处理不及时、转运效率低、无法合理回收资源等问题,使城市以高科技、宜居的形象展示给外来人群。
1基本思路与应用技术
1.1基本思路
当安装于垃圾桶的超声波模块测定垃圾桶集满垃圾后,通过WIFI模块发送垃圾收取信息给控制中心,控制中心发出垃圾桶收取指令给垃圾收集机器人。利用UWB定位技术,智能垃圾收集机器人可以确定自身与目标垃圾桶在全局地图的绝对位置,然后利用激光雷达对周围环境进行扫描并建立起局部地图,接着使用路径规划算法确定路径并完成避障。到达目标地点后,机器人将装满垃圾的垃圾桶运走并将空的垃圾桶留下。当运输完成后,运输車将自动返回停放区并自动接入充电桩进行充电。
1.2应用技术
UWB定位技术:其具有传输速率高,穿透力强、功耗低、抗干扰效果好、安全性高、系统复杂度低、能提供精确定位精度等优点。这是激光雷达定位技术、超声波定位技术等难以做到的。可确定机器人与目标垃圾桶精确的全局位置,为跟随路径规划提供全局导向。
激光雷达技术:雷达扫描仪顺时针360度旋转扫描,对周围的环境进行测距扫描,进而获得周围环境的局部地图,从而实现路径规划和避障。激光雷达技术可以避免超声波定位技术中由于超声波被吸音材料吸收从而导致的定位偏差。
自动充电技术:机器人在空闲时间段将自动运行到充电位置上进行自动充电,免去了人工看守充电的麻烦,提高了我们系统的稳定性和易管理性。
RFID射频技术:射频识别(RFID)是一种无线通信技术,可以通过无线电讯号识别特定目标并读写相关数据,而无需识别系统与特定目标之间建立机械或者光学接触。
嵌入式互联网接入技术:本项目采用WIFI模块接入互联网,与蓝牙模块等局域网组建模块相比,WIFI模块可以实现远程通信和远程控制。另外,WIFI模块还具有体积小,功耗低的特点。
机器学习技术:控制中心利用运输车工作数据进行归纳学习,以获得更强的适应性、灵活性等智能特性,提高机器人的整体性能。同时当数据样本足够大后,对不同地点垃圾清理时间会越来越科学规范。
2 智能垃圾收集机器人的设计
2.1机器人的机械设计
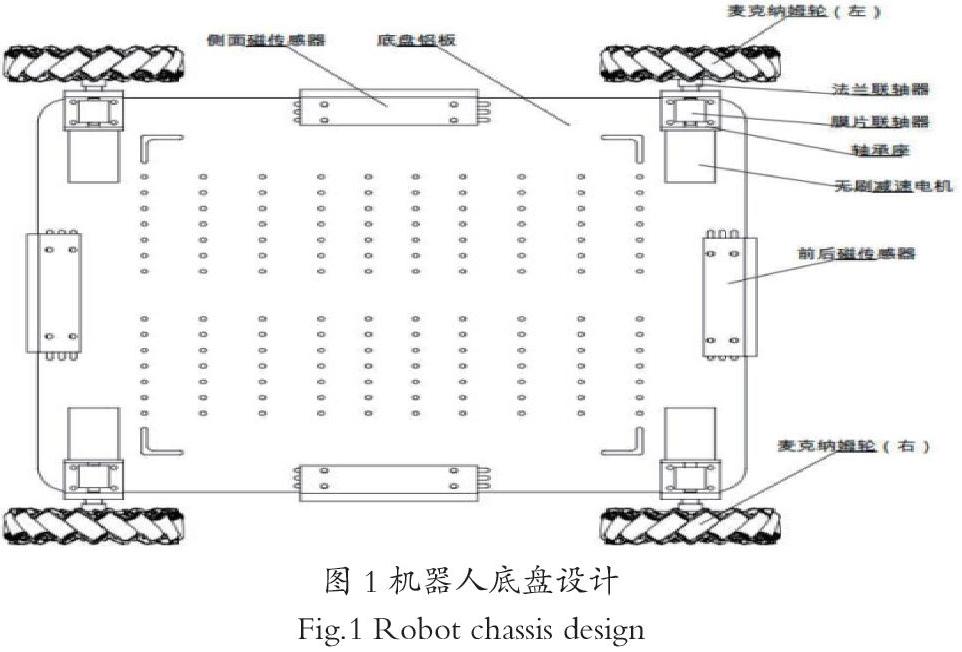
面对一些街道等比较拥挤狭小的地方,机器人要想在其中灵活运行,基于麦克纳姆轮技术的全方位运动运输车可以实现前行、横移、斜行、旋转及其组合等运动方式。因垃圾重量层次不齐,此运输车必须有足够大的承重能力来承受商品重量,因此采用了定制CNC的轴承座,以及购买了相应的联轴器来实现运输车强大的承重能力。
机器人底盘机械设计如图1所示:
全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。
这是与机器人抓取机械结构相互匹配的垃圾桶,机器人通过RFID射频技术识别到垃圾桶的机械连接部位后,对垃圾桶实施抓取。
垃圾桶机械图如、机器人抓取机构机械图如图2所示:
要使垃圾收集机器人稳定运行,必然要有稳定的供电系统,所以很有必要设计出一种安全便捷的全自动充电系统。当机器人数量庞大的时候,充电就成为了一个问题,所以我们采用了自动充电的技术,让机器人在空闲时段可以自动进行充电,免去了人工充电的麻烦。因此我们设计了一款可用于运输车可以自动充电的插座。
2.2 机器人功能设计
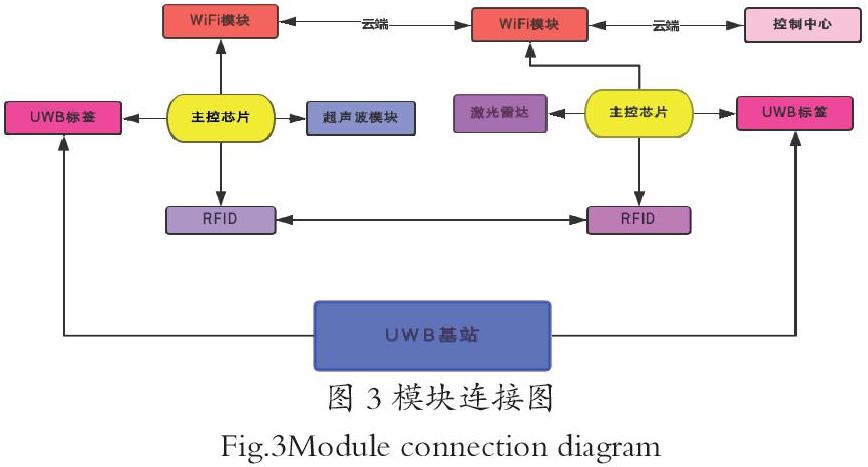
垃圾收集机器人主要由六部分组成:UWB定位系统、单片机控制系统、RFID、自动避障系统、WIFI联网模块、夹取装置。
垃圾桶主要有四部分构成:UWB定位系统、单片机控制系统、RFID 标签、WIFI联网模块、基于超声波的垃圾数量检测系统。
控制中心主要由两部分组成:单片机控制系统、WIFI联网模块
各个模块之间的连接关系如图7所示:
图7左侧为垃圾桶各个硬件模块组成图,右侧为垃圾收集机器人各个硬件模块组成图。
2.3主要技术说明
2.3.1 UWB定位系统
UWB定位系统包括UWB定位基站和UWB定位标签。机器人上需要装载1个UWB标签。各基站根据到达时间差得出各基站到标签的原始距离,进而根据原始距离建立数学模型,从而解算出机器人所在坐标,再通过WIFI模块将坐标等信息发送回给标签,然后标签再把位置信息传给机器人主控。从而来控制机器人运动的方向和速度。
TDOA是对TOA技术加以改进的算法。TDOA定位不必要进行基站和移动终端之间的同步,而只需要基站之间进行同步。因为基站的位置是固定的,基站之间进行同步与基站和移动终端之间进行同步要容易实现得多。这使得TDOA定位比TOA定位要更加容易实现。
假设移动终端的位置与基站1和基站2的距离差为R21=R2-R1,则移动终端的位置必定在以两个基站为焦点,与两个焦点的距离差恒为R21的双曲线上。即若移动终端的位置为(X0,Y0),基站1位置为(X1,Y1),基站2位置为(X2,Y2),则它们满足关系:
AAAAA
再通过另一组移动终端与基站1基站3或基站2基站3的TDOA,可以得到 另一组双曲线,两组双曲线将最多产生两个交点,再根据先验知识(如半径范围 等)判断出移动终端的位置。
它的基本原理可以从下面的图4得到良好的诠释。
2.3.2 RFID识别系统
RFID识别系统包括RFID读写器、RFID天线、RFID电子标签。FRID射频识别技术最重要的地方莫过于RFID读写器,将RFID天线固定在机器人抓取机构上,RFID读写器通过RFID天线和电子标签传递射频信号,从而读取上方垃圾桶信息。
2.3.3 自动避障系统
引力场(attraction)随机器人与目标点的距离增加而单调递增,且方向指向目标点;斥力场(repulsion)在机器人处在障碍物位置时有一极大值,并随机器人与障碍物距离的增大而单调减小,方向指向远离障碍物方向。
引力势场的范围比较大,而斥力的作用范围只是局部的,当机器人和障碍物的距离超过障碍物影响范围的时候,机器人不受排斥势场的影响。
人工势场法如图5所示:
2.3.4 机器学习
首先探索性数据分析:当垃圾分布数据刚取得时,可能杂乱无章,看不出规律,通过作图、造表、用各种形式的方程拟合,计算某些特征量等手段探索垃圾量时空分布的可能形式,即往什么方向和用何种方式去寻找和揭示隐含在数据中的规律性。
其次模型选定分析,在探索性分析的基础上提出一类或几类可能的模型,然后通过进一步的分析从中挑选一定的模型。
最后推断分析:通常使用数理统计方法对所定模型或估计的可靠程度和精確程度做出推断。
机器学习流程如图6所示:
2.3.5 机器人协同系统
UWB定位系统虽然内置了无线模块,但为了提高效率,一般只用于传输路径规划指引指令,至于其它复杂的命令(比如强制断电,指定路线运行,指定工作区待命等),则需通过WIFI模块,以此来提升安全性与稳定性。结构中存在一个主控系统,它具有系统的完全信息,并能够进行全局规划与决策。系统中的其它机器人则利用WIFI模块进行通信,机器人既能与主控机器人进行信息交换,又能与其它的机器人进行信息交换。机器人之间虽然不具有系统的完全信息,只有特殊条件下,才由主控机器人进行全局的规划与决策。
3 装置应用及转化前景
采用了UWB定位技术进行定位,这是激光雷达定位技术、超声波定位技术等难以做到的。本项目采用激光雷达技术来进行避障,激光雷达扫描仪顺时针360度旋转扫描,对周围的环境进行测距扫描,然后建立起瞬时周围轮廓,并结合UWB定位与城市地图来确定障碍物的位置,进行智能避障。激光雷达技术可以避免超声波定位技术中由于超声波被吸音材料吸收从而导致的定位偏差。
如今社会人力成本越来越高,智能垃圾收集机器人的使用可以大幅度地减少人力成本。由于该系统是不需要人为干预的自动化系统,因此机器人并不需要配备驾驶人员和垃圾分拣人员,只需要定期检查机器人,以及设置后台监控室实时监控机器人即可,因此该机器人的效率比起传统的人工分拣要提高50%以上。解决了城市清洁人员缺少,招工难,用人荒等问题,使得城市清洁进入一个新的水平,这将会给社会带来巨大的经济效益。
参考文献:
[1]柔性制造系统中智能运送机器人的设计与实现[J].成文娟,陈银树,尹序臻,江永鑫,福建轻纺,2020-03-17期刊
[2]三自由度关节式机械臂轨迹控制研究[J].陈芳,自动化技术与应用,2020-02-25期刊
[3]基于单片机与组态的智能电机控制系统研究戴文滔[J]; 佟胜伟; 张利来通信电源技术2019-12-25期刊
[4]王明亮.关于中国学术期刊标准化数据库系统工程的进展[EB/OL].(1998-08-16)[1998-10-04].
作者简介:
王克强(1968.4-),江西,赣州,硕士,教授,研究方向:人工智能.
基金项目:大学生创新项目(201911347023)资助项目.
(仲恺农业工程学院 自动化学院, 广东 广州 510220)
猜你喜欢
中国新通信(2022年4期)2022-04-23
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
好孩子画报(2021年2期)2021-03-15
计算机与网络(2020年19期)2020-12-04
作文与考试·小学高年级版(2020年19期)2020-11-16
中国计算机报(2020年5期)2020-03-30
恋爱婚姻家庭·青春(2019年9期)2019-12-10
文萃报·周二版(2019年32期)2019-09-10
红领巾·探索(2017年12期)2017-12-26
