基于纠错编码联合迭代的多址干扰消除方法
2020-05-09 01:09鲍亚川王金华
无线电通信技术 2020年3期
鲍亚川,王 迪,王金华
(1.中国电子科技集团公司第五十四研究所,河北 石家庄050081;2.卫星导航系统与装备技术国家重点实验室,河北 石家庄050081;3.北京卫星导航中心,北京100094)
0 引言
扩频通信,因其具有大容量、抗干扰等特征,在卫星通信、移动通信、卫星导航以及民用通信领域都得到了广泛的应用。作为一种自干扰体制,其通信能力及应用会受到多址干扰问题的限制。在民用地面移动通信系统中,多址干扰往往可以通过采用零相关扩频码、智能天线等技术手段进行有效抑制。但在卫星通信等类异步扩频通信系统中,多址干扰问题往往只能通过优化信号体制设计来缓解,或者在信号接收端进行多址干扰抑制或消除来实现通信容量的最大化[1-2]。
作为提高扩频通信系统通信容量的一种手段,多址干扰抑制技术多年来得到了发展,现有技术主要分为多用户联合检测和多址干扰消除两大类。多用户联合检测技术基于对不同用户信号的相关性计算,利用解相关技术实现多用户间多址干扰消除。该类方法的多址干扰抑制效果好,但运算复杂度随用户数量成指数增长,在用户数量大且最需要多址干扰抑制的情况下,难以进行工程实现,因此该类方法的应用具有较大的局限性。多址干扰消除技术包括串行干扰消除和并行干扰消除技术两类。基于对各用户信号的相关检测,在对期望信号的检测中采用串行或并行的方式对其他用户信号进行消除。该类方法性能相对于多用户检测是次优的,但在实现上具有适度的复杂性,因而得到了较为广泛的应用。但其多址干扰抑制效果受限于对多用户信号的初始检测准确度,在多址干扰较为恶劣的情况下会较早出现平台效应,多址干扰抑制性能不够理想[3-5]。
本文提出的方法,通过将纠错译码与并行多址干扰消除技术的联合迭代,实现了扩频通信多址干扰抑制效果的大幅度提高。尤其解决了在多址干扰极度恶劣情况下,现有多址干扰消除技术性能较差的技术难题,并且在异步扩频通信系统应用中具有更为明显的优势。
1 系统模型
扩频通信系统可以分为异步和同步两类[4],因为N路异步系统可以等效为2N-1路同步系统。本文采用同步系统模型进行研究,假设一个同步扩频通信系统,用户数为N,信号采用BPSK调制,在高斯白噪声信道下,接收信号为:
(1)

第k个用户信号的匹配滤波器的离散时间输出为:
(2)
(3)
(4)
式中,第一项为第k个用户信号的有用部分;第二项为其他用户信号与第k个用户信号扩频码之间的互相关,即多址干扰;第三项为信道噪声引起的干扰[6]。
传统信号检测时,接收端对匹配滤波器的输出在每个比特间隔采样,然后根据判决门限判决得到发送数据序列。

(5)
由式(5)可知,直接根据匹配滤波相干累加结果进行判决,在多址干扰严重的情况下极有可能导致判决错误,从而导致误码[7-8]。
2 多址干扰消除方法
传统的多址干扰抑制算法分为联合检测算法和干扰消除算法两大类[9]。
联合检测算法被称为线性多用户检测,其基本思想是利用变换矩阵来消除用户间的多址干扰。主要包括最大似然序列检测、迫零检测以及最小均方误差检测等方法[10]。
干扰消除算法被称为非线性多址干扰抑制算法,主要包括串行干扰消除和并行干扰消除两类算法。
串行干扰消除算法按信号功率强弱将接收信号排序,首先检测出功率最强的信号,对其进行判决得到该信号的估计值,然后从接收到的信号中减去该估计值,作为下一级的输入信号。根据此方式逐级进行干扰消除和判决,最后得到检测结果。其缺点是功率最强的用户信号估计可靠性起决定性作用,而其估计的准确性又难以保证[11]。
并行干扰消除算法同时对每个用户的接收信号进行估计,然后对各个用户的信号进行重构,在对期望信号的检测中减去其他用户对其产生的多址干扰。并行干扰消除往往需要采用多级结构,以提高干扰消除准确性,通过对不同消除层级添加权值衍生出了部分并行干扰消除 (Partial Parallel Interference Cancellation,PPIC) 算法等改进方法[12-13]。
对于异步扩频通信系统而言,目前的多址干扰抑制方法存在较大的应用问题。在异步系统中,各个用户的信号是不同步的,所以期望用户的每个比特都会受到其他用户两个比特的干扰,如图1所示。

图1 异步扩频通信多用户干扰示意图Fig.1 MAI of asynchronous spread spectrum communication system
在异步系统多址干扰抑制过程中,多用户联合检测很难做到对用户间互相关矩阵进行准确计算,而且所有的用户要等效成两个用户,多用户检测数量翻倍,计算复杂度根本不可能满足工程实现的要求。而对于干扰消除方法,干扰消除以比特为单位,当前比特受到其他用户两个比特的干扰,在进行当前比特解调进行干扰消除时难以对其他用户延迟比特的干扰进行准确估计和消除,这使得干扰消除效果大打折扣。
因此基于传统的多址干扰抑制方法,在面对异步扩频系统时,要么难以进行工程实现,要么多址干扰抑制效果难以达到理论水平。
3 多址干扰消除误差分析与改进算法设计
纠错编码与多址干扰消除作为降低扩频通信误码率、提高通信能力的两种有效手段,均在扩频通信中得到了广泛的应用,二者在理想条件下都能提供较大的增益,但要使各自性能得到最大程度的发挥则受到各种条件的限制。
纠错编码的性能因具体码型不同而受到不同因素的影响,码型构造方法、编码长度、编码效率以及译码算法都会不同程度地影响纠错编码性能。对于所有纠错编码方案的共同特点是:高信噪比条件下的纠错编码增益要明显优于低信噪比下的增益,提高纠错译码器输入信号的质量是提高译码性能的一种最直接有效的手段[14-15]。
对于并行干扰消除(Parallel Interference Cancellation,PIC)算法,其应用的一个重要前提是假设前一级期望信号以外的信号估计与实际信号发送信号相符,从而达到消除干扰的目的。但事实上这种估计值往往存在一定的偏差,尤其在多址干扰恶劣情况下估计是极其不准确的,这种偏差传递到干扰消除模块,将会导致不准确甚至错误的干扰分量消除。之后对期望信号的估计也是不准确的,这是限制PIC算法性能的根本原因,也是导致PIC在多址干扰极度恶劣的情况下失效的原因[16]。
PPIC算法可以改善这种状况,即通过在各级消除模块增加不同的权值,降低不准确估计带来的错误干扰消除影响,使并行干扰消除性能得到了一定程度的改进。但是这种改进本质上是一种妥协,是以放弃部分干扰消除能力为代价的。此外通过增加PPIC级数,也可以实现干扰消除效果一定程度的提高,但是达到一个极限后继续增加消除级数就无济于事了。PPIC算法仿真结果如图1所示,通过增加并行干扰消除级数并分配相对合理的权值,可以使解调误码率逐渐降低,但实际当干扰消除级数≥3时,误码率曲线基本重合,无法得到进一步的解调增益。因此要提高PIC的干扰消除效果,尽可能提高对干扰信号的估计准确度是最大限度发挥PIC干扰消除性能的根本性手段。
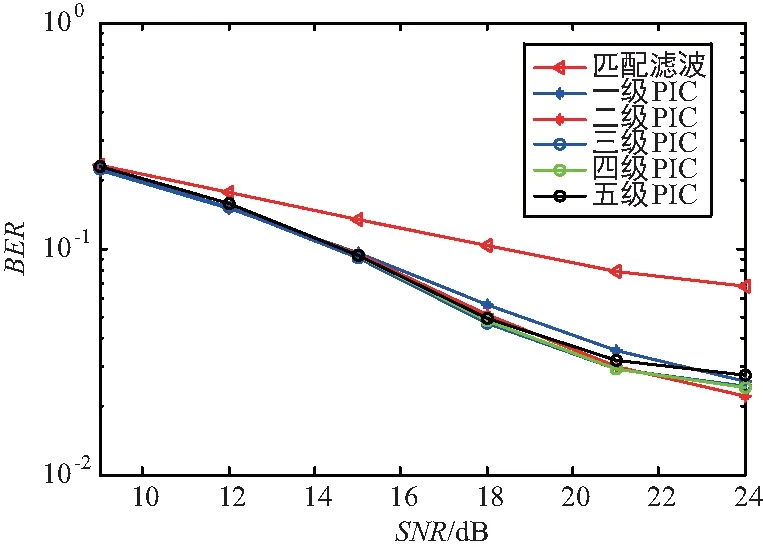
图2 多级PIC误码率曲线Fig.2 MAI cancellation performance of PIC with different stages
基于上述分析,本文提出了纠错编码C联合迭代并行干扰消除算法, Decode Combined-PIC(DC-PIC)算法。具体算法步骤如下:
① 接收端收到各路经过信道编码后的信号,经过匹配滤波器组对各路信号进行信号估计;
② 基于信号功率、时延、载波相位信息,进行信号重构;
③ 各路信号接收模块基于接收信号和重构信号进行干扰消除后,经过匹配滤波器组对各路信号进行信号估计;
④ 根据各路信号的检测信息和信道编码的比特分组方式交由译码器进行译码,得到第一级干扰消除后的检测结果;
⑤ 步骤①~④可根据需求进行循环迭代至n次输出信号解调和译码结果。
算法的基本流程如图3所示。特别对于采用了纠错编码的异步扩频通信系统,在比特解调后,通过整帧的纠错译码,可以获得相对准确的整帧信息比特。在此基础上支持实现异步通信所导致的多比特位互干扰的准确估计和消除,解决了干扰消除算法在异步系统应用时的一个难题。
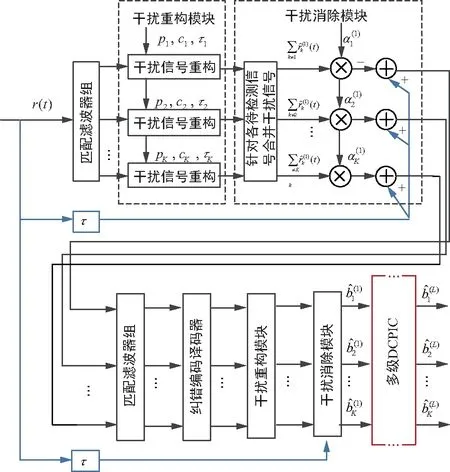
图3 算法流程图Fig.3 Procedure of algorithm DC-PIC
4 仿真实验
针对本文提出的算法,基于Matlab开展了仿真实验。仿真采用20路用户, GPS采用无周期长码作为扩频码,扩频增益为44。循环编码、Hamming编码均采用(7,4)编码长度,LDPC采用(2 000,1 000)的编码方案。
首先对不同的信道编码方式进行算法性能仿真,仿真结果如图4所示。从图中可以看出,在20路多址情况下,多址干扰成为影响解调误码率的主要影响因素。使用简单的匹配滤波难以有效对抗多址干扰,解调误码率不会随单路信号信噪比的提高产生明显改善。采用PIC方法后,可以对多址干扰形成一定程度的消除,但是单纯的多址干扰消除技术很快出现平台效应,解调误码率只能降低到10-2级别,仍然难以满足一般的信息解调需要。同时如前所述,三级PIC相比较二级PIC方案并没有获得额外的增益,简单依靠增加PIC级数难以获得足够的抗多址能力。
如果信息传输中采用了信道编码,在干扰消除之后进行译码,可以使解调误码率得到进一步降低,根据所采用编码方式的不同,可获得的编码增益也不同。从仿真结果可以看出,编码增益LDPC>Hamming>循环码,这也就是传统方案所采用的普遍方式。

图4 基于不同纠错编码的多址干扰抑制解调误码率Fig.4 BER of MAI cancellation method with different ECC mode
采用本文提出的方法,在传统的纠错编码后再增加一级PIC和纠错译码,解调误码率得到进一步降低,一定程度上相当于获得了二次解码增益,增益大小同样与编码方案有关。尤其对于LDPC方案,由此获得的增益可以达到7 dB以上,抗多址解调性能尤其突出,最大限度使LDPC的高增益性能得到了挖掘。
针对迭代次数的变化,对算法进行了进一步仿真。受限于计算机运算能力和仿真时间,对循环码和Hamming码进行仿真实验,实验结果如图5所示。实验结果表明增加迭代次数,可以使解调性能进一步提高,但是获得的迭代增益随级数的增加逐级降低,最终趋于0,即当迭代级数达到一定数值后,增加级数将不会再获得增益,这种规律与PIC实验相一致。

图5 不同迭代级数条件下的多址干扰抑制性能Fig.5 BER of MAI cancellation method with different stage number
对比图2与图5可以发现,不同于传统的PPIC算法通过增加级数获得的微弱增益,基于DC-PIC算法增加多址干扰级数所获得的增益十分明显。结合图4与图5,考虑到DC-PIC算法增益与纠错编码增益的直接关系,可以预见采用多级LDPC编译码方式进行循环迭代多址干扰消除,所能获得的干扰消除增益将会进一步大幅度提高,相比传统PPIC+纠错译码的增益将达到10 dB以上。
5 结束语
本文针对恶劣多址干扰情况下传统多址干扰算法性能不佳,以及传统多址干扰算法在异步扩频通信中难以应用的情况,提出了基于纠错编码联合迭代的多址干扰消除算法。该算法一方面利用纠错编码的纠错能力,获得了更强的多址干扰消除能力,对于采用高编码增益的通信系统,相比于传统方法能够带来7 dB以上的增益。另一方面,针对异步条件下的多址干扰难以准确估计和消除的问题,通过比特整帧译码后进行迭代消除的方法,解决了多址干扰消除方法在异步系统中的应用难题,对于提高特殊通信、卫星通信等常见的异步扩频通信系统的多用户服务能力具有重要意义。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2021年6期)2021-07-20
高教学刊(2020年7期)2020-03-04
电子制作(2019年19期)2019-11-23
计算机与数字工程(2019年7期)2019-07-31
移动信息(2018年5期)2018-12-05
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年1期)2017-11-24
现代电子技术(2016年22期)2016-12-26