人形机器人校本课程的教学实践*
2020-05-24 08:28马才平
教育信息技术 2020年4期
马才平
(广东省佛山市顺德区杏联初级中学,广东佛山 528325)
一、人形机器人教育现状与问题
人类一直在追求制造高仿真的人形机器人的原因是什么?不是执着于人形,是执着于替代人可以完成的事情,并且做得更好是其中的情结之一[1]。人形机器人的研究也随着人工智能的水平有了更高的发展。人形机器人涉及的技术层面可以在一定程度上代表了一个国家人工智能科技的发展水平。
(一)开设人形机器人校本课程的重要性
轮式机器人在中小学的校本课程已经得到初步普及,这为人形机器人的学习奠定了基础。相比于轮式机器人,人形机器人的灵活度更大,创意可以更多,并且更容易激发学生的学习兴趣。人形机器人是关节型机器人,可以拼装成各种需要的外形以实现各种目的,可以做成一个机械臂完成各种动作,更可以模仿工厂的人工智能流水线来拼装成一个微人工智能流水线。如果说轮式机器人是为了提高学习编程的兴趣,那么人形机器人就是为了用编程去改变生活,用编程去创作,把创作成为现实[2]。中小学开展人形机器人教学可以让人工智能从娃娃抓起,为人形机器人技术的沉淀产生一个良性的循环,为国家输送更多从事人工智能的优质人才[3]。
(二)存在的主要问题
人形机器人的技术研究难度偏大,目前我国人形机器人教育方面的教学资源不多,以致从事人形机器人教育的教师也是少之更少[4]。学校虽然开设了人形机器人课程,但教师缺乏有效的课程开设经验,没有完整的课程学习框架,容易形成“放养式”教学,不利于学校对课程后续的资金投入和发展,更不利于对尖端人才的培养以及发现。
二、教学实践
(一)师资队伍建设
师资是课程开设的基础条件,人形机器人教师需要具备以下的专业素养:
1.熟悉一门编程语言。编程是一切机器人培训的基础,是让机器人“听话”的基础,编程语言是相通的,只要学会其中一种就一通百通。
2.具备良好的硬件知识基础和原理分析能力。教师不只是会使用硬件,而且还要大致知道这些硬件运行的原理。例如只会编程使用超声波传感器是不够的,作为教师还要清楚它是根据蝙蝠的原理制作的,以便在给学生传递知识的时候不只是知识本身,还有知识的灵魂。
3.掌握基本的电工技能。人形机器人线路比较多,焊接是教师必备的一个重要的技能。
(二)教学条件建设
笔者购置的是Robotis GP 人形机器人,该机器人入门简单,交互性友好。虽然前期资金投入会比较大,但是只要正常的使用,损坏率比较低,相比与其他的机器人的使用寿命更长。从长远考虑是节约成本。
(三)人形机器人课程教学环节
本课程教学分五个阶段,是根据课程进行的深度而改变的,其中通过师徒制多类型小组教学贯穿第三、第四和第五环节。(如表1)
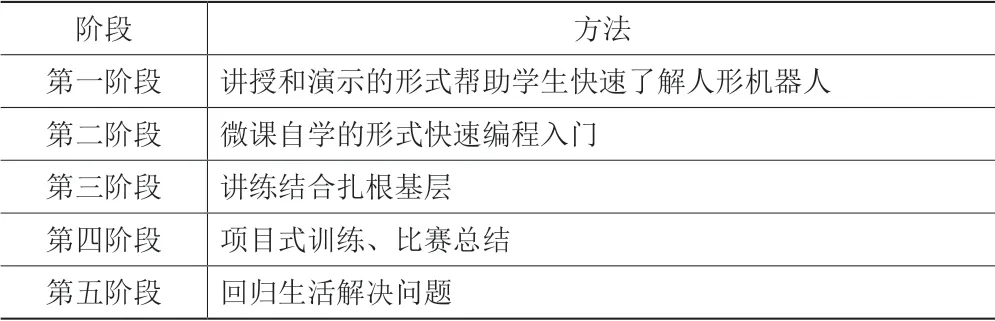
表1 人形机器人课程教学环节
第一阶段:人形机器人入门
由于学生对机器人的了解不多,笔者主要通过讲授法和演示法对人形机器人的动作编程以及运行原理作出基本介绍。讲授法与演示法结合可以更快更好地让学生对人形机器人的认识有比较全面的了解,节约成本和时间。
第二阶段:微课自学编程
在有了第一阶段的认识,学生迫切需要学习编程来提升自己对机器人的控制能力,如果这时候再采用讲授法或者演示法会显得枯燥并且“拖累”了拔尖学生的学习进度。因此,这一阶段会通过差异式教学进行分层教学,进行基本的分组,以适应后面的培训内容。
校本课程的目的不是学习基础,而是发现人才和培养人才。在这个阶段,笔者采用微课自学的方式,让学生学习使用数组、if 语句、while 语句和函数等基本语句的使用方法。这些都是编程的入门知识,并不需要深入学习什么是面向过程、面向对象或者设计模式这些知识。然而单凭校本课程培养学生的编程意识是不行的,所以笔者都会建议学生周末在家多练习编程,并通过布置一个小项目的作业来了解学生学习进度,以及对微课内容的巩固。
第三阶段:讲练结合扎根基础
在有了编程基础后,就是结合硬件编程,对电机,传感器的控制,通过讲练结合的方式可以降低学习的难度,到这个阶段以后学生练习过程中会产生很多的问题,笔者表示如果都要亲自一一解决的话,根本忙不过来,并且课堂效率大打折扣。这时候笔者会安排正在进行第六个阶段(自主研发)的初二学生,指定每个人带两个徒弟,负责帮助他们分析问题解决问题。针对师徒制有对应的评价体系。
第四阶段:项目式训练,总结与反思
经过了第三阶段,学生已经能熟练操控机器人,接下来就是情景实践。
以最新一届全国中小学电脑制作活动中人形机器人全能挑战赛的规则和场地为例,首先给出一个场地任务,让学生自己分析,思考解决方案;接着跟小师傅讨论方案可行性,研究方案并进行现场测试。在这之前小师傅不能把去年的解决方案拿出来,只能给徒弟思考出来的方案提供指导意见;紧接着可以把徒弟的方案跟去年的方案结合,讨论方案之间的优缺点,或者可以发现一个新的解决方案。师徒一起把方案优化好,教师组织一次对单个任务的比赛,根据师徒评价制度进行评分。在最后阶段按照全国人形机器人全能挑战赛的方案进行模拟比赛,当有各级赛事时就挑选名列前茅者代表学校参赛;并对一个学年的学习进行总结,选出继续在初二留在人形机器人校本课程的学生。
在这个阶段,学生已经熟练操控人形机器人去解决问题。并且经过几年的方案积累和优化,参加各级赛事的获奖率都能稳居前列。
第五阶段:回归生活,解决问题
这个阶段针对的是经过初一全学年的培训后,根据评价方案评选出留下来学生,他们要做的就是回归生活去实战。机器人代人的时代正在进行着,很多流水线其实都是通过传感器识别后通过控制机械臂来操作完成。基于这一原理,可以把人形机器人拆分成各种组合,配合3D 打印机可以实现更多的创意,例如机器狗、车辆停泊系统或者螃蟹等。为了让学生带着人形机器人走近生活,笔者首先拜访有流水线工件外包的工厂,选择具备所需条件的工厂,在周末带领学生到现场研学,申请些外包工件回校用所学的知识去解决,师生一起研究方案。这是整个人形机器人校本课程的最终目的,也是对学生生涯教育的一个最重要的影响。
三、教学内容评价
(一)过程性评价
首先是师徒制的评价方式。徒弟完成任务,师傅加3分,徒弟加3分,徒弟任务失败,徒弟扣1分,师傅扣2分;师徒任何一个违反纪律,其余连带者扣作案者所扣的50%分值。在师徒积分制的基础上再把若干的师徒组成小组,假若师傅为A,徒弟为b,那么有三种小组的分法,分别为师傅组(AAAAAA)、徒弟组(bbbbbb)和师徒组(AbAbAb),针对任务的难易度组成不同的组来评价。
笔者还会根据学生每次在课堂过程中表现出来的团结意识,任务分析能力,学习效率,应变能力和心理素质等各个综合方面的考量进行评价,并通过学校教育分析系统进行记录,在期末求出各个学生各个能力值汇总,帮助分析学生类型并进行汇总评价。该分值满分为10分。
(二)结果性评价
通过针对全国中小学电脑制作活动的人形机器人全能挑战赛的比赛方案模拟比赛统计成绩,过程性评价占总成绩40%,结果性评价占60%。最后推选总成绩名列前茅的学生参加全国中小学电脑制作活动的人形机器人全能挑战赛。
通过这种评价方式推送出去参加比赛的学生,五年中有四年夺得全国中小学电脑制作活动人形机器人全能挑战赛的冠军。并且在过程性评价中也发现相比于单纯的小组积分制,加入师徒捆绑积分制的方式产生了很多意想不到的收获(如表2)。
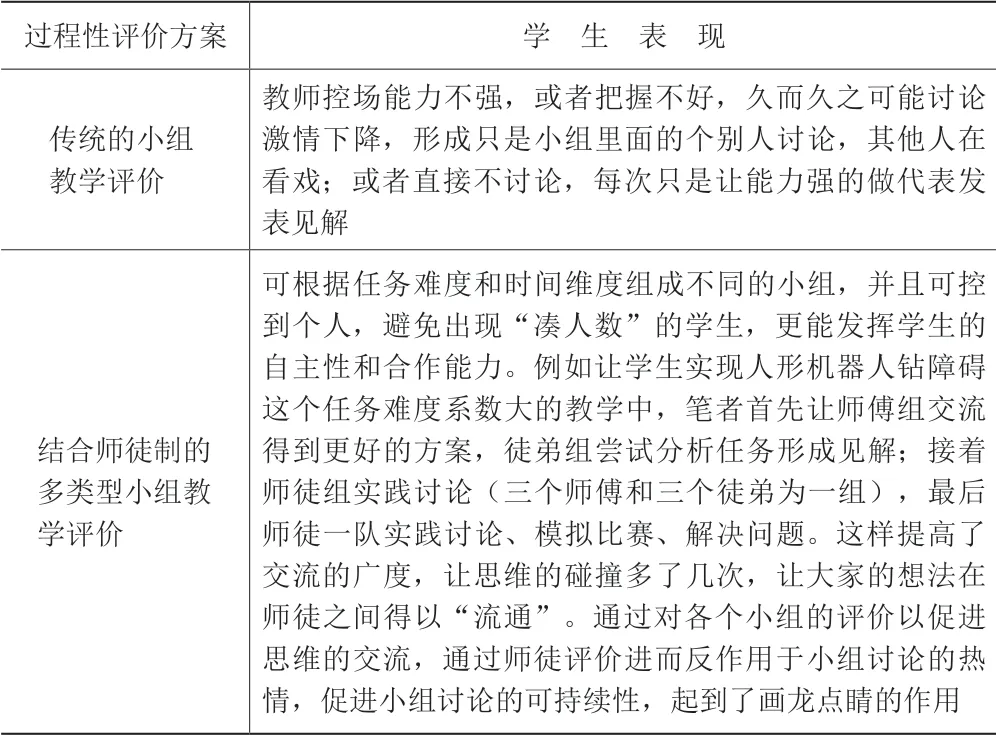
表2 传统小组教学评价与结合师徒制的多类型小组教学评价实践对比
四、结语
由于前期资金投入大和师资缺乏等原因,目前人形机器人教育在初中的普及率还不高。初中学生学习人形机器人除了理解编程、应用物理知识和模拟人解决情景问题之外,更重要的是可以使学生产生更多的思维碰撞,引导他们将来深入研究“机器人替代人”,服务于社会。希望通过本文能让更多的青少年接触人形机器人,更多的学校参与进来,共同研究人形机器人教育,让人形机器人在中小学教育中得到普及,尽早播下希望的种子。
猜你喜欢
趣味(语文)(2021年9期)2022-01-18
少先队活动(2021年2期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
学生天地(2020年17期)2020-08-25
数学大王·低年级(2020年3期)2020-03-12
少年漫画(艺术创想)(2019年9期)2020-01-18
时代邮刊(2019年24期)2020-01-02
小学科学(学生版)(2019年7期)2019-08-01
中国诗歌(2018年6期)2018-11-14
疯狂英语·爱英语(2018年12期)2018-08-13