
基于实时小波变换的燃料电池混合动力船舶能量管理策略
2020-05-28 06:34张泽辉陈辉高海波管聪
中国舰船研究 2020年2期
张泽辉,陈辉,高海波,管聪
1 武汉理工大学 能源与动力工程学院,湖北 武汉 430063
2 武汉理工大学 高性能舰船技术教育部重点实验室,湖北 武汉 430063
3 南开大学 软件学院,天津 300350
0 引 言
近些年,能源和环境问题日益受到社会的关注,清洁能源在船舶领域的应用逐步成为行业研究的热点[1-2]。燃料电池混合动力船舶,不仅能够满足船舶在机动、续航力、节能、噪声与振动控制等方面的性能需求,而且能够实现零排放[3-5]。
混合动力系统是燃料电池船舶的核心部分,其中能量管理策略是研究混合动力船舶的关键技术之一。能量管理策略可以分为两类:基于规则的能量管理策略和基于智能优化算法的能量管理策略。基于规则的能量管理策略是指通过设定能量管理规则,根据功率需求、电池荷电状态范围及电源特性等信息,来控制混合动力系统的工作模式。Han等[5]提出了根据电池的荷电状态和功率需求信息制定能量管理策略,利用蓄电池实现对燃料电池输出功率的“削峰填谷”,尽可能使燃料电池工作在高效率工作区间内,从而提高整个动力系统的经济性。Feroldi等[6]以太阳能、风能与燃料电池组合而成的混合动力系统为研究对象,设计了基于状态机的混合动力系统能量管理策略。张泽辉等[7]通过分析功率需求数据,对基于频率控制的复合电源,进行了超级电容选型与控制参数优化。Abeywardana等[8]采用低通滤波器对功率需求信号进行分频处理,并设定规则用于控制电池功率输出与超级电容的电量控制。从研究结果可知,基于规则的能量管理策略的主要优点在于控制逻辑简单可靠,易于应用到实际工程中,然而,其对动力系统状态变化的适应性差,而且规则制定还依赖于工程师的实践经验。而基于智能优化算法是指采用类似动态规划、机器学习与最优控制等方法构建能量管理策略。在此研究领域,杨泽鑫等[9]提出了一种考虑船舶电力系统运行限制和温室气体排放限制的能量管理优化策略,以最小消耗为目标,采用差分进化算法,对船舶的航速、发电机组的功率分配进行了优化;Kanellos等[10]首先分析了全电力推进船舶电力系统的运行工况,然后提出了一种以船舶运行成本及温室气体排放量最小为目标,同时兼顾船舶电力系统运行的全局优化能量管理方法;Chen等[11]通过深入分析混合动力系统,利用动态规划对电池电流进行优化,提高了燃油的经济性;Song等[12]提出了不同温度和放电深度下的电池寿命退化模型,并通过动态规划算法优化了不同状态下的复合电源功率分配。这类算法能够明显提高混合动力系统的性能水平。然而,智能算法的复杂度相对较高,较难用于实船控制中。
综上所述,目前基于燃料电池混合动力船舶的能量管理控制策略鲜有成熟的控制方案。因此,本文将以燃料电池混合动力系统为研究对象,提出一种基于实时小波变换的能量管理策略,以实现对燃料电池混合动力船舶的优化控制,并构建混合动力系统仿真模型,对能量管理控制算法进行仿真验证。
1 燃料电池混合动力船舶
1.1 目标船型
研究能量管理策略,首先需要对功率需求进行分析。在汽车混合动力研究领域,科研人员通常使用汽车的各种测试工况(例如欧洲ECE+EUDC,日本JC08,美国FTP75等)对混合动力汽车的能量管理策略和设备选型进行研究。然而,船舶的用途不同,其工况也大不相同,迄今在船舶领域尚无类似汽车行业的标准工况。因此,本文采用世界上第一艘燃料电池混合动力渡船Alsterwasserk号的工况数据,对能量管理策略进行了研究。如图1所示,2008年Alsterwasser号燃料电池混合动力渡船在汉堡的阿尔斯特湖投入使用,该船的设计参数如表1所示[5]。

图 1 Alsterwasser号燃料电池混合动力船Fig. 1 Alsterwasser hybrid fuel cell driven ship

表 1 Alsterwasser号参数Table 1 Parameters of Alsterwasser
该船舶的4个主要工况如图2所示。在正常航行时(第1阶段和最后阶段),船舶功率需求波动缓慢;当靠港时,功率需求波动剧烈,在较短的时间内功率需求从0~100 kW变化多次;当舶靠岸时,由于此时船舶在接送乘客,推进系统没有任何能量消耗;当舶离港时,船舶由静止状态加速到巡航速度,功率需求达到峰值。该曲线包含了渡轮的多种状态,具有一定的代表性,目前已经被广泛用于混合动力船舶的仿真研究。

图 2 燃料电池混合动力渡船的功率需求曲线Fig. 2 Power demand curve of the hybrid fuel cell driven ship
1.2 动力系统拓扑结构
本文采用复合电源替代原船动力系统中的蓄电池作为储能系统,复合电源由超级电容与动力电池组成,模拟改装后的动力系统拓扑结构如图3所示。图中:Pfc为燃料电池功率;Vfc为燃料电池电压;VDC为母线电压;Pload为负载功率。将原船蓄电池模拟改装为复合电源后,需要对复合电源的拓扑结构进行选择。
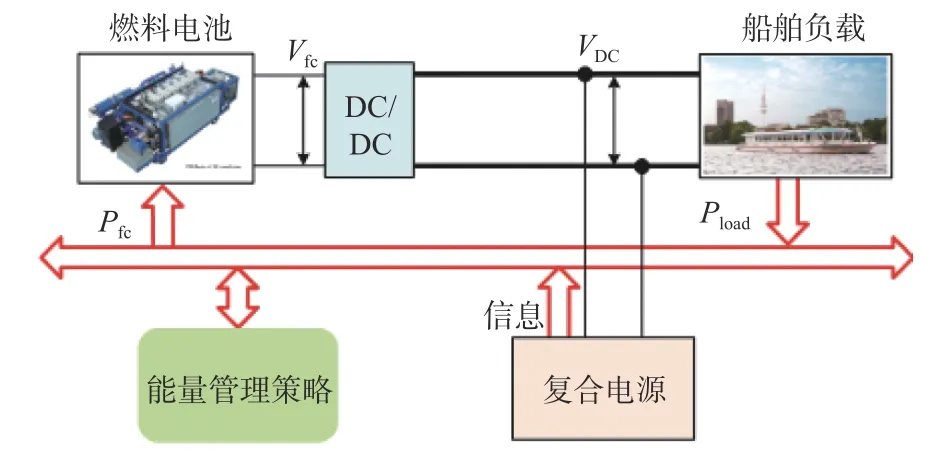
图 3 燃料电池混合动力系统拓扑结构Fig. 3 The topology of hybrid fuel cell power system
复合电源的拓扑结构通常可分为3种类型:被动式、主动式和半主动式[10]。不同的拓扑结构具有不同的能量效率、控制方法以及购置成本,因此需要根据具体的使用场景,选择合适的拓扑结构。被动式拓扑结构为超级电容与动力电池直接并联到直流母线上,因此结构形式简单,不需要设计复合电源控制策略,但是其功率分配由电池与超级电容自身电特性所决定,不能进行控制。主动式拓扑结构为超级电容与动力电池都经DC/DC电压变换器接入直流母线,通过控制DC/DC从而控制超级电容与动力电池的输出功率,但是此拓扑结构的设备成本高、控制算法复杂且能量效率较低。半主动式拓扑结构中有2种模式,分别为超级电容经DC/DC与电池并联、电池经DC/DC与超级电容并联。其中,前一种模式的优点是能够使用DC/DC对超级电容进行升压,从而提高超级电容的利用率,但是对DC/DC的控制算法要求比较高;后一种模式对控制DC/DC的控制算法要求较低,但是超级电容由于直接接入直流母线,其利用率比较低。因此,本文选用了超级电容经DC/DC升压后与电池并联的拓扑结构[12],其中燃料电池为主电源,复合电源为辅助电源。复合电源中的蓄电池为稳压源,其燃料电池系统中的DC/DC工作在电压源模式,而控制超级电容的DC/DC工作在电流源模式。
2 混合动力系统建模
2.1 燃料电池模型
本文使用Motapon等[13]提出的动态质子交换膜燃料电池(PEMFC)堆栈模型,该模型结合了化学模型和电气模型的特点,忽略了电极内动态反应的流体,被广泛用于燃料电池动力系统的仿真研究。该燃料电池模型输出电压Vfc为

式中:Eoc为燃料电池的开路电压,V;Vact为活化电压损失,V;Vohm为欧姆电压损失,V。活化电压损失Vact和欧姆电压损失Vohm分别由下式计算。

式中:Tslope为塔费尔斜率;ifc为燃料电池输出电流,A;i 为交换电流,A;Td为燃料电池响应时间,s;rohm为燃料电池内阻,Ω;s为拉普拉斯算子。
式(1)中Eoc值大小与电势有关,可由下式计算:

式中:kc为电压常数;En为燃料电池的电势,并可由下式计算。

2.2 DC/DC仿真模型
DC/DC仿真模型通常可以分为隔离型和非隔离型。隔离型DC/DC相比于非隔离型DC/DC具有更好的升压性能,适合用于控制超级电容充放电,实现超级电容与直流母线电气隔离,因此本文复合电源中选用了隔离型双向DC/DC。根据文献[5],燃料电池系统采用的是非隔离型DC/DC。隔离型电压变换器按其原边电路结构可分为:正激式、反激式、半桥式与全桥式;按副边电流结构可分为:半波整流、全波整流、全桥整流和倍流整流[14]。全桥变换器与其他拓扑结构类型的电压变换器相比,其电力电子开关器件的电压与电流应力小,容易实现软开关。然而,这种结构需要的电力电子开关器件数量较多,功率损耗较大。根据船舶实际使用情况,本文采用全桥式拓扑结构。在Matlab/Simulink仿真环境下,搭建全桥式隔离型双向DC/DC仿真模型(图4)。隔离型双向DC/DC电压变换器采用移相控制方法对输出电压进行控制。

图 4 隔离型双向DC/DC仿真模型Fig. 4 Isolated bidirectional DC/DC simulation model
2.3 复合电源模型
半主动式复合电源拓扑如图5所示,超级电容经过DC/DC电压变换器后与动力电池并联接入到直流母线上,共同承担复杂波动。超级电容对外输出功率可以通过控制DC/DC实现,并且超级电容的工作电压范围较大,能够较充分地使用超级电容。

图 5 半主动式复合电源拓扑结构Fig. 5 Topology of semi-active hybrid energy storage system
本文采用经典的电池等效电路模型[14],该模型通过使用电压极化项,刻画荷电状态(state of charge,SoC)对电池特性的影响,同时使用低通滤波器来提高模型的稳定性。电池模型的充电与放电公式为:


式中:Ns为超级电容串联个数;Np为超级电容并联个数;Ne为超级电容电极层数;ε为材料介电常数;ε0真空介电常数;Ai为电极和电解质之间的界面面积,m2;QT为电荷量;d 为分子半径;c 为摩尔浓度;Rsc为超级电容内阻;isc为超级电容电流。
2.4 可控负载模型
为了便于研究,本文将电力推进系统负载等效为图6所示的可控负载模型,用于模拟电力系统功率需求。将所采集的历史功率需求曲线与电力系统中母线直流实时电压相除,所得到的电流值输入至可控电流源,从而模拟载荷功率的需求电流。
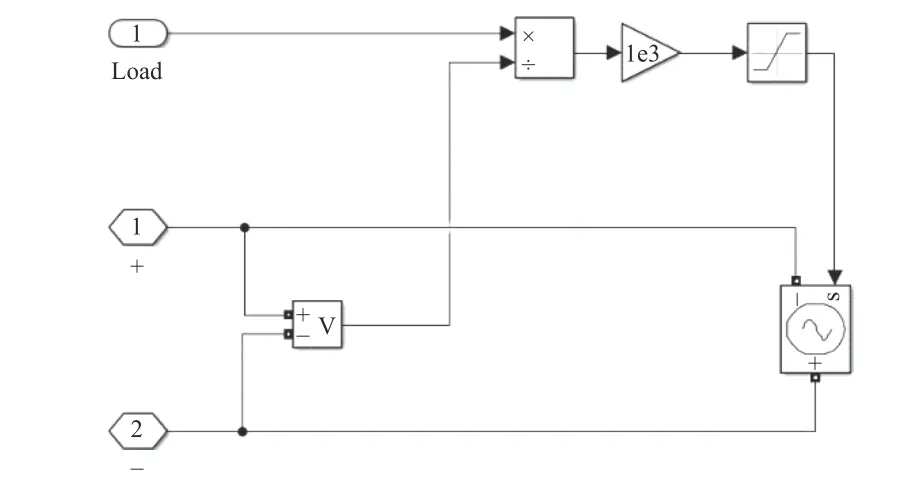
图 6 负载的等效仿真模型Fig. 6 Equivalent simulation model of load
3 基于实时小波变换的能量管理策略
能量管理策略由3个部分构成,分别为实时小波变换、储能设备电量控制与电源保护策略。基于实时小波变换的能量管理策略的结构框图如图7所示。图中:Sbat为电池荷电状态;Sbat_ref为电池荷电状态设定值;Vsc为超级电容电压;Vsc_ref为超级电容设定电压;Pbat_ref为电池输出功率设定值;Pfc_ref为燃料电池输出功率设定值;Psc_ref为超级电容输出功率设定值。首先对动力系统的功率信息进行实时采集,然后采用基于小波变换的算法对功率信号进行处理,功率需求的低频部分输入至燃料电池功率控制模块,功率需求的高频部分输入至复合电源功率分配模块;同时采用PI算法对储能设备的电量进行控制,其充电功率输入至燃料电池功率控制模块;最后输出燃料电池、锂电池与超级电容的功率设定值。图8所示为能量管理策略算法在Matlab/Simulink仿真环境中的实现。

图 7 能量管理策略结构Fig. 7 Energy management strategy structure
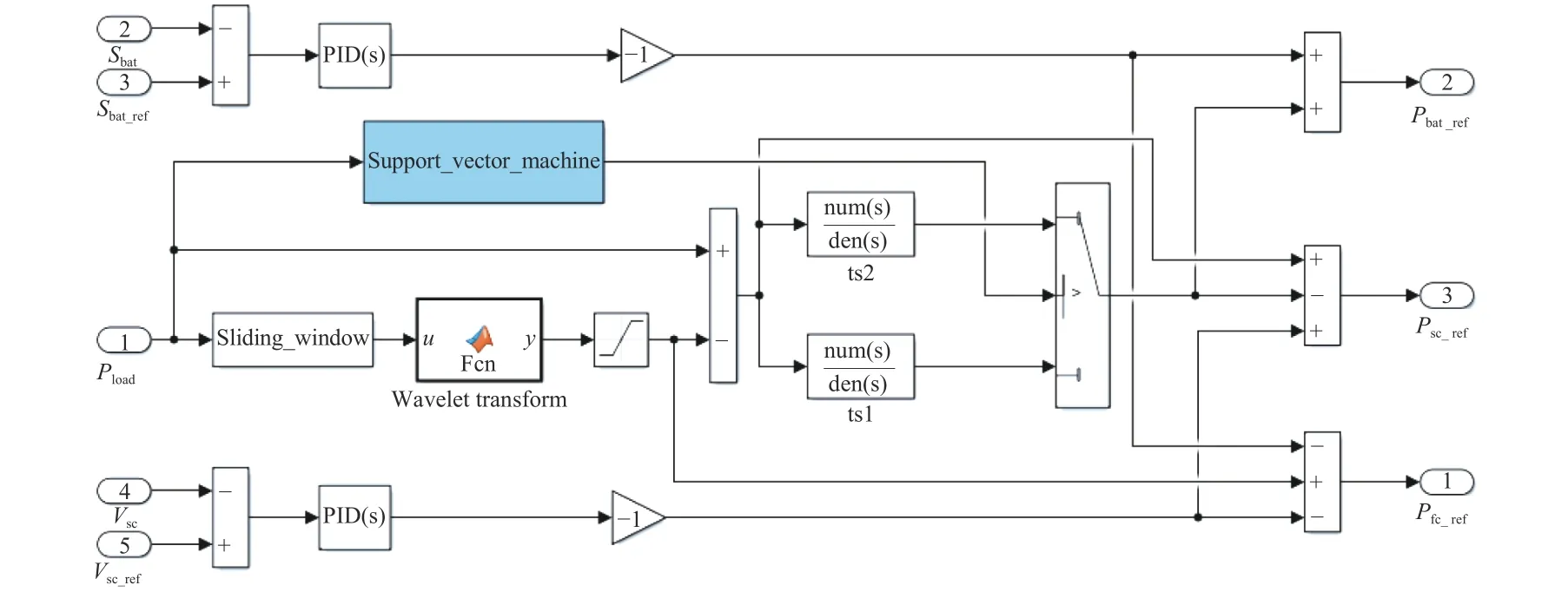
图 8 能量管理策略仿真控制图Fig. 8 Simulation control diagram of energy management strategy
3.1 滑动窗口
本文采用滑动窗口(Sliding window)的方法实现基于小波变换的实时能量管理策略。滑动窗口是指能够根据指定的单位长度来框住时间序列,从而计算框内的统计指标,相当于一个固定长度的滑块在刻度尺上滑动,每滑动一个单位即可反馈滑块内的数据。由于Mallat算法要求进行小波变换时数据量需为2的整数次幂,所以在线滤波中最新的数据数量也一定为2的整数次幂。假设时间窗口设定的数据量为2p个(p为正整数),同时设i时刻已采集到的数据序列为a1,a2,…,ai,采用滑动窗口法的实时滤波具体步骤如下:
1)当i<2p时,由于采样的数据量小于滑动窗口所需的数据量,所以不进行小波变换操作,输出值即为当前时刻的采样值ai。
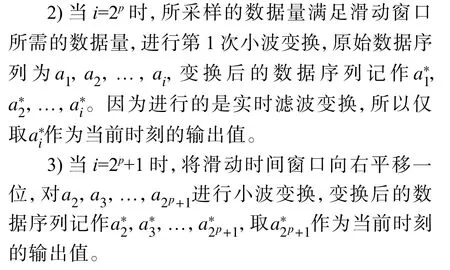
4)在此之后,对第3个步骤进行重复。
图9所示为滑动窗口的工作过程,滑动窗口内的数据随着传感器信号的采集而进行更新,同时对窗口内的数据进行小波变换,将变换后最后一个值作为实时小波变换的输出。滑动窗口的尺度大小会对小波变换的效果产生影响,本文需要尽量将功率中的高频信号过滤掉,从而优化燃料电池的工作过程。如果滑动窗口尺度较小,则过滤高频信号的效果较差;如果滑动窗口尺度较大,将会增加算法复杂度。因此,滑动窗口尺度大小应在保证信号滤波水平的前提下尽可能小,从而提高数据处理的速度。本文经过多次仿真调试,时间尺度大小选择为16。

图 9 滑动窗口工作过程Fig. 9 Sliding window working process
3.2 小波变换
通过小波变换从滑动窗口内的信息进行提取,依据不同相位和尺度进行分解。船舶功率需求是离散信号,通过使用离散小波分解函数与重构函数将离散功率需求信号(一维)分解到不同的分解层,离散小波变换公式与其逆变换公式分别如下:

相比于其他常见的小波,Haar小波的母函数具有在时域中的滤波跨度最短、小波变换与其逆变换相同的优点,由于这些特性使得Haar小波变换在现实控制系统中更容易实现。在简化程序的组成并进一步提高程序执行效率的情况下,可将Haar小波表达式写为

图 10 小波分解与重构模型Fig. 10 Wavelet decomposition and reconstruction model
因为燃料电池只能对外输出功率,不能吸收能量,所以根据式(12)设定燃料电池承担低频信号的正功率部分,复合电源承担负的功率部分,同时分解出的高频功率需求部分也由复合电源承担。

3.3 复合电源功率分配
本文采用文献[7]提出的复合电源功率控制策略,该控制策略主要由支持向量机(Support vector machine, SVM)和低通线性滤波器组成。SVM对船舶工况进行识别,选择相应的滤波器从而对复合电源中的电源进行控制。复合电源所承担功率需求被滤波器分为高频部分与低频部分,高频部分由超级电容承担,低频部分由锂电池承担。船舶处在定速工况时,选择1号低通滤波器;船舶处在机动工况时,选择2号低通滤波器。定速航行与机动情况下所选择的低通滤波器分别为:

式中:T1,T2为滤波器时间常数。通过调整滤波器时间常数T的大小可以控制船舶动力系统的功率分配,时间常数的数值越大,功率需求通过低通滤波器的高频分量越少。
3.4 储能设备电量控制
复合电源中电池组和超级电容的电量状态采用传统PI控制方法。如图11所示,锂电池电量PI控制的输入为电池设定SoC与电池实时监测SoC的差值,输出为动力电池充电功率Pcharge_bat。

图 11 电池电量控制策略Fig. 11 Battery energy control strategy
文献[8]指出,控制超级电容电量时,采用控制超级电容电压的方式优于控制超级电容SoC的方式。如图12所示,超级电容电量PI控制的输入为设定电容电压与实时监测电容电压的差值,输出是电容充电功率Pcharge_sc。

图 12 超级电容电量控制策略Fig. 12 Supercapacitor energy control strategy
2个PI环节的参数可参考文献[8],当在船舶功率需求波动较大时,电量PI控制对滤波器功率分配控制的影响可以忽略不计;当船舶功率需求波动较小时,该控制方法可以实现对锂电池和超级电容的充放电量控制,从而使电池与超级电容电量维持在合理范围内。
3.5 储能设备保护
复合电源中的动力电池如果低电量时依然继续放电,会极大地损害电池;如果电池处于高电量还继续充电,则可能会引起电池损坏甚至自燃[16-17]。复合电源中的超级电容如果低电量依然继续放电,会对DC/DC电压变换器工作造成影响,进而影响到整个电力系统的稳定性;如果超级电容在高电量时依然继续充电,则可能引起超级电容爆炸,十分危险。因此在实际使用复合电源系统时,需要设计复合电源保护策略。
一般而言,锂电池正常工作的SoC值区间为0.2~0.8,此区间锂电池电压特性曲线比较平滑,超级电容正常工作区间一般为额定电压值的0.5~0.9[18]。因此,设定当锂电池低于SoC值下限时,停止放电,进入充电模式,当锂电池高于SoC值的80%时停止充电;当超级电容低于工作电压值下限时,停止放电,进入充电模式,当其达到额定电压的80%时停止充电。超级电容与蓄电池充电功率是由燃料电池提供的,燃料电池输出功率为Pfc=min[Pload+Pcharge_bat+Pcharge_sc, Pfcmax]。
4 仿真实验
如图13所示,在Matlab/Simulink环境下建立了燃料电池混合动力系统仿真模型,包括燃料电池系统、复合电源、可控负载以及混合动力系统能量管理策略。图中:Vbus为母线电压;Vbat为电池电压;Ibat为电池电流;Isc为超级电容电流;Iload为负载电流;Vrefdc1为电压变换器设定电压。复合电源选用文献[19]中优化的参数,将目标船型的功率需求作为输入信号,通过所建立的仿真模型进行多组仿真实验。

图 13 燃料电池混合动力系统仿真模型Fig. 13 Simulation model of hybrid fuel cell power system
4.1 实验结果一
将所提出的基于小波变换的能量管理策略与文献[5]所提出的基于规则的能量管理策略进行对比,仿真实验结果如图14~图17所示。图14为在基于实时小波变换与基于规则的能量管理策略控制下的燃料电池输出功率曲线。由图可以看出,船舶在机动运行时,采用基于小波变换的能量管理策略控制的燃料电池功率输出较为平缓,功率需求的低频部分由燃料电池承担,功率需求的高频部分由复合电源系统承担,从而能够延长燃料电池的使用寿命。

基于实时小波变换的能量管理策略与基于规则的能量管理策略控制下的动力电池输出功率曲线如图15所示。由图15可以看出,在船舶机动运行时,与基于规则的能量管理策略相比,基于小波变换的能量管理策略控制下的电池输出功率较为平缓,较大程度地降低了电池功率波动。由图16可以看出,复合电源中的超级电容通过自身快速充放电,优化了电池工作电流,因此锂电池的使用寿命能够得到延长。
基于实时小波变换的能量管理策略与基于规则的能量管理策略控制下的直流母线电压波动曲线如图17所示。由图17可以看出,在船舶机动运行时,与基于规则的能量管理策略相比,基于小波变换的能量管理策略控制下的母线电压波动较为平缓,提高了燃料电池混合动力系统的电能质量。
4.2 实验结果二
将所提出的能量管理策略与根据文献[8]所设计的Filter能量管理策略进行对比,结果如图18~图20所示。由图可以看出,2种控制策略控制燃料电池输出功率的效果相近。但是Filter能量管理策略采用的是固定滤波器,不能根据船舶工况变化进行相应改变,因此在船舶机动运行时,电池输出功率波动较大,会导致电池使用寿命缩短,未能很好地使用超级电容。


图 20 不同控制策略下的超级电容输出功率Fig. 20 The output power of supercapacitor under different control strategies
4.3 实验结果三
本文所设计的能量管理策略中,虽然采用了PI控制实时对复合电源的电量进行补偿,但是依然需要考虑电池或超级电容电量不足的情况。鉴此,分别仿真了电池电量不足、超级电容电量不足以及两者电量都不足时各电源的工作情况。如图21所示,当超级电容电量低时,燃料电池对超级电容进行充电,设定为充电至其额定电压的80%停止。由图可以看出,随着超级电容电压的升高,其充电功率逐步减小。图22所示为电池电量低时,燃料电池对蓄电池进行充电,设定为充电至电池SoC达到80%停止,由图可以看出,其充电功率先增加而后限功率充电。图23所示为蓄电池与超级电容电量都不足时,整个电力系统进行降功率工作。

图 21 超级电容电量不足时各设备输出功率曲线Fig. 21 Output power curves of power source when supercapacitor energy is insufficient

图 22 电池电量不足时各设备输出功率曲线Fig. 22 Output power curves of power source when batteries energy is insufficient
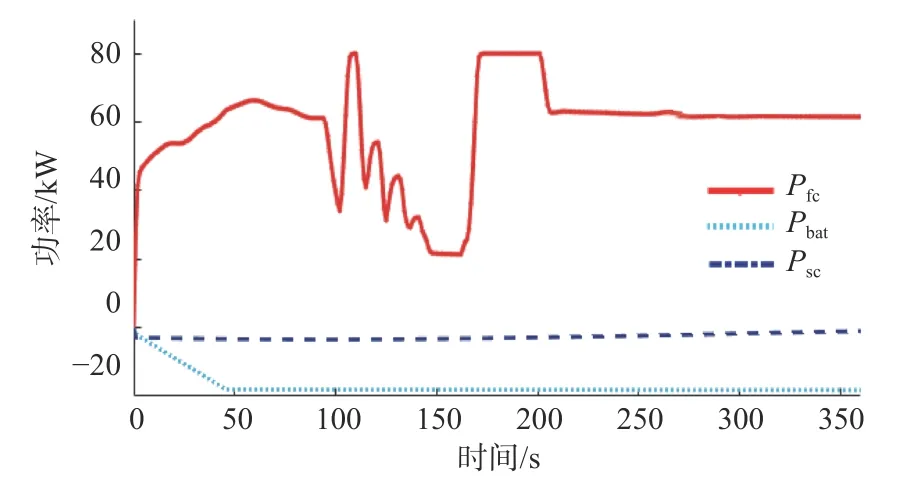
图 23 复合电源电量不足时各设备输出功率曲线Fig. 23 Output power curves of power source when energy of the hybrid energy storage system is insufficient
5 结 语
针对燃料电池混合动力船舶中燃料电池动态响应性能差、电特性软以及使用寿命短等问题,提出了一种基于实时小波变换的混合动力系统船舶能量管理策略。为此,基于Matlab/Simulink仿真软件,搭建了燃料电池混合动力系统仿真模型,并进行仿真实验。仿真结果表明:基于小波变换的能量管理策略能够很好地满足船舶功率需求,通过与原船能量管理策略进行比较,优化了燃料电池与锂电池放电过程,母线电压波动得到抑制,从而使得船舶电能质量得到了提高。后续将在小比例实验混合动力平台上,开展所提出能量管理策略的实物验证,根据实验结果,进一步优化本文所提能量管理策略。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
汽车实用技术(2022年10期)2022-06-09
交通科技与管理(2022年8期)2022-05-07
汽车工程师(2021年12期)2022-01-17
大众投资指南(2021年23期)2021-12-06
建材发展导向(2021年12期)2021-07-22
北京汽车(2021年2期)2021-05-07
知识就是力量(2016年6期)2016-05-31
中学生数理化·高二版(2016年5期)2016-05-14
销售与市场·管理版(2015年6期)2015-06-23
