具有时变时滞的Lur’e系统的新的同步条件
2020-06-05 08:09吴叶繁熊良林柳莹莹
云南民族大学学报(自然科学版) 2020年3期
吴叶繁,熊良林,柳莹莹,王 珍
(云南民族大学 数学与计算机科学学院,云南 昆明 650500)
0 引 言
近20年来,混沌系统的同步问题引起了学者们的关注[1-5],原因是同步在动态网络、信息安全、生物系统、电子电路等诸多领域有着广泛的应用和研究前景.很多动力学系统比如蔡氏电路、古德温模型都可以转化成Lur’e系统来处理,Lur’e系统是一类重要的非线性系统,它由一个线性部分和一个满足扇区界限的非线性部分组成[6].因此,很多学者对混沌Lur’e系统的同步问题进行了研究[7-12,24].此外,时滞广泛存在于网络控制系统、电路系统、化工系统等各种实际系统中,它的存在往往会导致系统性能变差甚至出现不稳定现象.综上所述,研究具有时滞的Lur’e系统的主从同步问题十分有意义[7-21,24].
近期,为了实现相关系统的同步,学者们发展了诸多控制方法,比如反馈控制[12-21]、采样控制[10]、脉冲控制[24].文献[10]利用采样控制器,结合新构造的分段可微LKF,研究了Lur’e系统的主从同步问题.当使用反馈控制来实现时滞Lur’e系统的同步时,文献[14]通过建立一个新的Lur’e-postnikov型李雅普诺夫泛函,结合使用詹森不等式进行处理,得到几个时滞依赖同步判据.文献[12]在构造LKF时使用了时滞分割法,并用詹森不等式对LKF的导数进行放缩,从而得到具有更低保守性的充分条件.文献[19]通过将三重、四重积分引入到LKF中,结合使用詹森不等式技术,获得了比文献[12]保守性更低的结果.可以看到,文献[14,12,19]通过使用各种方法如时滞分割、多重积分,得到了很好的结果,然而作者在处理LKF时,使用了詹森不等式.众所周知,詹森不等式虽然有效但是会带来一定的保守性[19].为了尽可能地克服这个保守性,以获得更大的时滞上界,学者们近期得到了一系列重要的不等式[22-23,25-30].比如文献[27]通过构造函数的方式,改进了詹森不等式,推出了一个名为Wirtinger-based的新不等式.基于此,得出了一些新的稳定性条件.借助自由矩阵的思想,文献[28]推导了一个新颖的自由权矩阵不等式,它包含詹森不等式和Wirtinger-based不等式.利用自由权矩阵不等式,建立了保守性更低的稳定性条件.最近,文献[22]的作者利用一组不完全正交的多项式函数,推导出一个含有更多自由矩阵的新积分不等式,该不等式的特点是可以提供更多交叉项信息和增加更多自由度.文献[28]中的自由权矩阵不等式是文献[22]中的新积分不等式的一个特例,基于这个新不等式[22],文献[22]得到了更好的结果.因此,本文拟基于文献[22]中的新积分不等式处理技术,结合构造更符合系统的新LKF,获得时滞Lur’e系统保守性更低的同步条件.

1 预备知识
1.1 系统描述
考虑一般的带有反馈控制的时滞Lur’e主从同步系统模型:

(1)
C:u(t)=K(p(t-h(t))-q(t-h(t))),
其中M,S,C分别表示该模型的主系统、从系统和控制器;x(t),y(t)∈Rn表示系统的状态向量,p(t),q(t)∈Rl是系统的输出向量;A,B∈Rn×n,D∈Rm×n,W∈Rn×m,以及C∈Rl×n是已知的实数矩阵;当输入控制u(t)=0(u(t)∈Rn)时,M,S是2个相同的Lur’e系统,K∈Rn×l表示待定的控制器增益矩阵;时变时滞h(t)满足如下条件:
(2)
假设误差信号e(t)=x(t)-y(t),则相应的误差系统可表示成:
(3)
其中η(De(t),y(t))=f(D(e(t)+y(t)))-f(Dy(t)).

(4)
其中D=[d1,d2,…,dm]T,di∈Rn,i=1,2,…,m.
由(4)式,显然有:
(5)
1.2 引理
引理1[22]x(t)是一个可微函数:[a,b]→Rn.若对称矩阵U(∈Rn×n)>0,Z11,Z22,Z33,Z44∈R5n×5n,任意矩阵Z12,Z13,Z14,Z23,Z24,Z34∈R5n×5n,N1,N2,N3,N4∈R5n×n满足
则下面的不等式成立:
(6)
显然,不等式(6)中包含自由矩阵,这增加了不等式的自由度,不仅如此,还将提供更多的交叉信息,这些都可为降低保守性发挥重要的作用.
2 理论结果及证明
本节将构造一个符合误差系统(3)特性的新LKF,结合积分不等式(6)对其导数进行放缩,获得使误差系统(3)渐近稳定的新充分条件,从而得到使得主从系统(1)同步的控制器设计条件.

(7)
(8)
(9)
Q3-Q2<0,Q2-Q1<0,
(10)
ψ(h1,0)<0,ψ(h1,u2)<0,ψ(h2,u1)<0,ψ(h2,0)<0,
(11)
则误差系统(3)是渐近稳定的,从而主从系统(1)可以达到同步.其中
Π1=e1-e3,Π2=e1+e3-2e6,Π3=6e6-6e9,
Π4=2e1-12e6+30e9-20e12,Π5=e4-e5,Π6=e4+e5-2e8,Π7=6e8-6e11,
Π8=2e4-12e8+30e11-20e14,Π9=e3-e4,Π10=e3+e4-2e7,Π11=6e7-6e10,
e0=[0n×17n0n×m],ei=[0n×(i-1)nIn0n×(17-i)n0n×m],i=1,2,…,17,
控制器增益为:
证明:结合系统(3)的特性,本文选择如下的LKF
其中
对Vn(et,t)(n=1,2,3,4)沿着误差系统(3)的解的轨迹求导得:
(12)
(13)
(14)
(15)
(16)
另一方面,根据(5)式,对于正定对角矩阵L3∈Rm×m有下列不等式成立,
-2(η(De(t),y(t))-K-De(t))TL3(η(De(t),y(t))-K+De(t))≥0,
(17)
即
(18)

(19)
因此,根据式(12)~(19)可得:
(20)
综上所述,根据(11)式可以得到,误差系统(3)是渐近稳定的.证毕.
3 数值实例
我们把所推导的同步准则应用到蔡氏电路中,以说明本文方法的有效性和优越性.给出蔡氏电路方程如下:
(21)
从以下两种情况来说明本文条件的可行性和有效性.
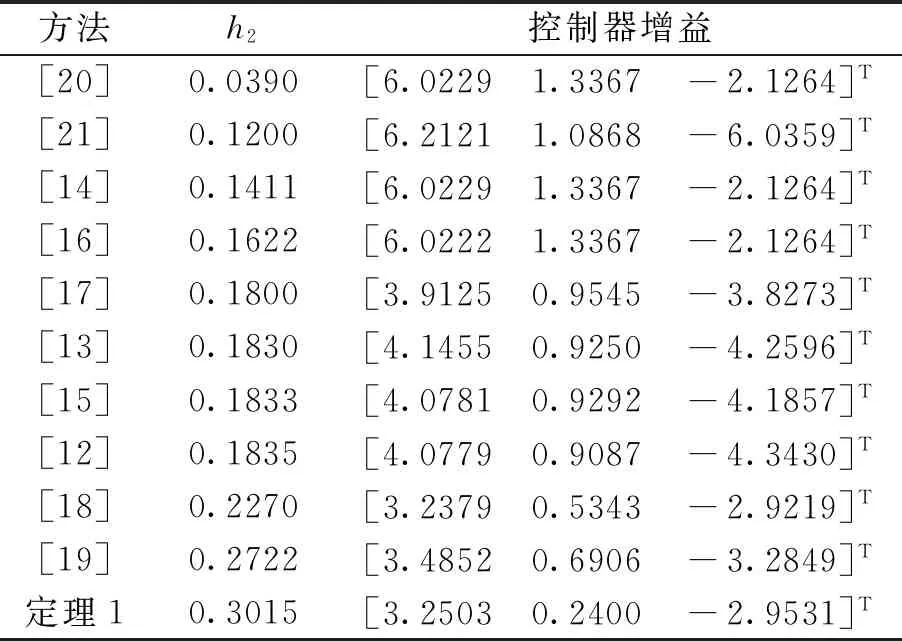
表1 当u1=u2=0,h1=0时,可允许的最大时滞上限及控制器
情况2:当h(t)为常时滞,我们有u1=u2=0,当r1=2,r2=1,h1=0,初值x(0),y(0)的取值与情况1相同时,可解出h2的最大上界为0.3015,相应的控制器增益矩阵为K=[3.2503 0.2400 -2.9531]T.表格1列出了本文与近期一些文献结果的对比,从表格中可以看出,本文所得时滞上限与文献[12],[18]和[19]相比,分别提升了64.3%,32.8%和10.8%.且当h2=0.3015时,相应的仿真结果被展示在图2-4中.图3和图4反应了当误差系统(3)中的控制输入u(t)=0时系统的混沌行为;图2描绘了当u(t)≠0(如K=[3.2503 0.2400 -2.9531]T)时误差系统(3)的状态轨迹,从图中可以看出系统(3)是渐近稳定的.定理1的有效性得到验证.
4 结语
本文探讨了时滞Lur'e系统的同步问题.首先,在充分考虑系统内部各个状态变量之间联系的基础上,构造出了一类新的多个包含增广向量的LKF.其次,使用一个新的自由矩阵积分不等式并结合时滞分割法去处理构造的LKF的导数.最后,通过一个数值实例来说明所得结论的有效性和优越性.本文方法还可以拓展到对具有马尔科夫跳跃的Lur'e系统的同步问题的研究中.
猜你喜欢
检察风云(2022年20期)2022-10-31
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
疯狂英语·爱英语(2020年12期)2020-12-29
疯狂英语·爱英语(2020年12期)2020-12-29
恋爱婚姻家庭(2020年36期)2020-12-25
北京航空航天大学学报(2020年10期)2020-11-14
北方工业大学学报(2019年5期)2019-03-30
中学数学杂志(初中版)(2019年6期)2019-01-14
上海师范大学学报·自然科学版(2018年3期)2018-05-14
喜剧世界(2017年24期)2017-12-06