链带式关节机器人并轴驱动机构设计*
2020-06-20 09:19曾祥彪孙令真陈伏华王秀敏林祥智
工程技术研究 2020年9期
曾祥彪,孙令真,陈伏华,王秀敏,林祥智
(广州华立科技职业学院,广东 广州 511325)
1 引言
多关节机器人是工业生产中常见的机器人形态之一,其中六轴关节机器人由于作业范围较广且具有较为灵活的机动性能,因此在自动装配、喷漆、搬运等各种复杂作业环境下通常采用六轴关节机器人[1]。为了避免各个轴或手臂转动过快的问题,六轴关节机器人的各个关节处通常设置有减速机[2]。但六轴机器人的减速机在运转过程中常常存在不稳定的问题,进而造成机器人作业时工作不平稳。针对这一问题,文章提出了链带式六轴关节机器人并轴驱动机构的整体设计方案[3]。
2 链带式六轴关节机器人的主体结构
链带式六轴关节机器人主体结构图如图1所示。链带式六轴关节传动机器人包括基座、转动座、第一手臂、第一关节、第二手臂、第二关节、操作手。基座上设置有用于驱动转动座转动的第一驱动机构,转动座上设置有用于驱动第一手臂转动的第二驱动机构,第二手臂上设置有用于驱动第一关节转动的第三驱动机构,第一关节上设置有用于驱动第二手臂转动的第四驱动机构,第二手臂上设置有用于驱动第二关节转动的第五驱动机构,第二关节上设置有用于驱动操作手转动的第六驱动机构。第一、二、三、四、五、六驱动机构均包括驱动电机和减速机,驱动电机和对应的减速机之间均通过传送带或传送链传动连接。转动座包括用于与基座转动装配的转动部以及外延至基座外侧的外延部,第一手臂转动装配在外延部上,在作业过程中与转动座之间呈锐角,这样避免了六轴关节机器人在作业过程中重心外悬量过大的情况,控制六轴关节机器人的重心始终处于靠近基座的位置。
3 第一驱动机构至第六驱动机构的传动原理
链带式六轴机器人在使用时,第一驱动机构驱动转动座转动,第二驱动机构驱动第一手臂摆动,第三驱动机构驱动第一关节摆动,第四驱动机构驱动第二手臂进行周向方向的自转,第五驱动机构驱动第二关节摆动,第六驱动机构驱动操作手进行周向方向的自转。第一驱动机构的减速机设置在第一防护壳内,第一防护壳为正方体状并由四块正方形板拼接而成;第一手臂整体为H型。
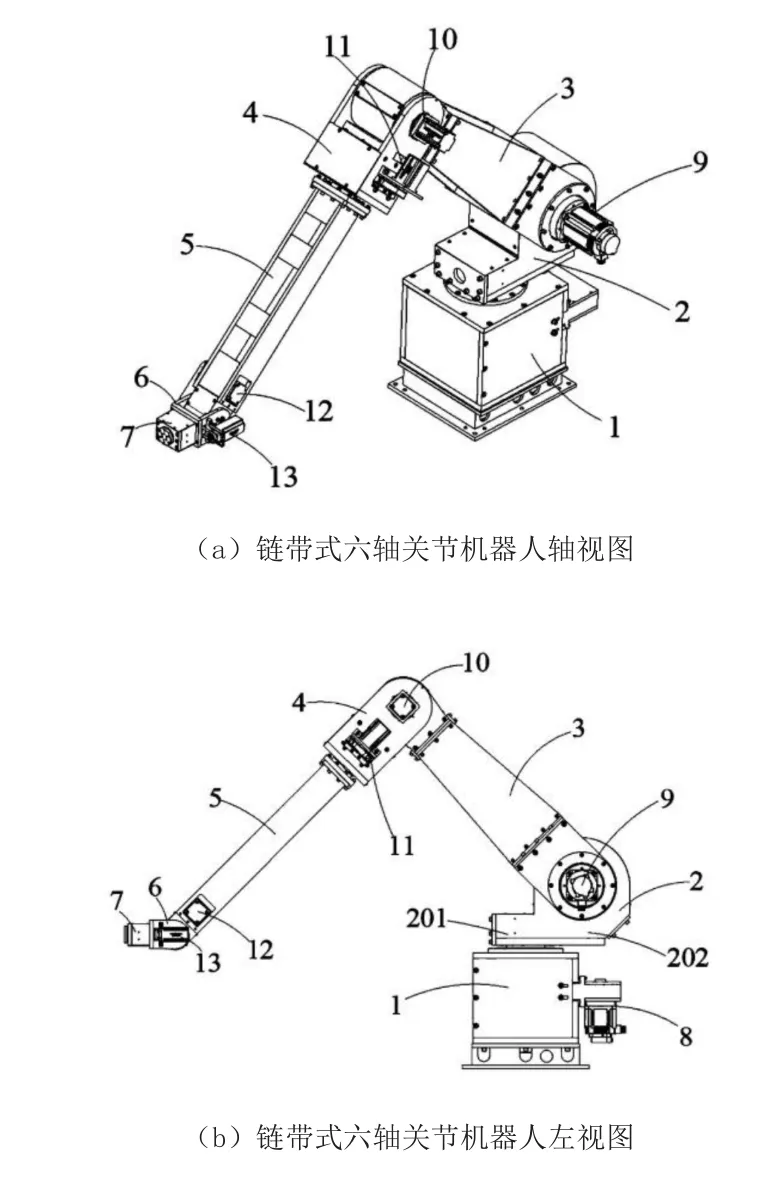
图1 链带式六轴关节机器人主体结构图
4 链带式关节机器人并轴驱动机构设计方案
链带式关节机器人的设计主要包括第一、四、五、六驱动机构的并轴驱动机构与第二、三驱动机构的同轴驱动机构。链带式六轴关节机器人并轴驱动机构的结构示意图如图2所示。
4.1 并轴驱动机构的结构设计
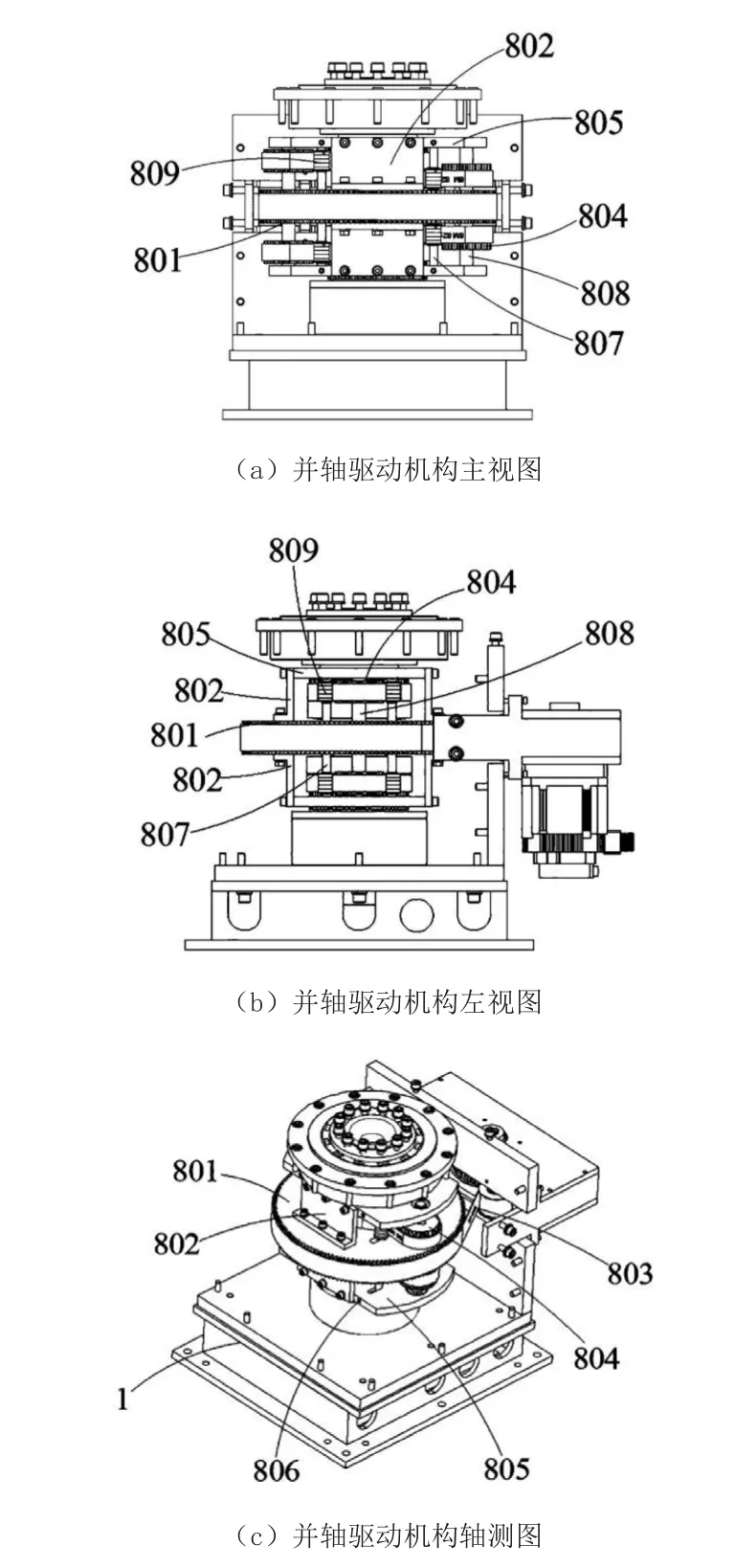
图2 链带式六轴关节机器人并轴驱动机构的结构示意图
第一、二、三、四、五、六驱动机构均包括驱动电机和减速机,驱动电机和减速机之间通过传动带传动连接。第一、四、五、六驱动机构为并轴驱动机构,其中的驱动电机和减速机分别称为并轴驱动电机和并轴减速机。所谓并轴驱动机构,即并轴驱动电机的传动轴与并轴减速机的并轴主动轴平行。由于第一、四、五、六驱动机构的结构基本相同,仅是规格和型号之间存在差异,以下仅以第一驱动机构为例对并轴驱动机构进行详细说明。如图2所示,并轴减速机设置有并轴主动轮,并轴驱动电机的输出轴上安装有驱动齿轮,并轴主动轮通过传动带与驱动齿轮传动连接,并轴主动轮的转动中心(即圆心)位置转动装配有并轴主动轴,并轴主动轴和并轴主动轮之间装配有轴承,并轴主动轴的一端即为动力输出端。并轴主动轴的偏心位置转动装配有两个并轴从动轴,两个并轴从动轴关于并轴主动轮的转动中心对称,其与并轴主动轮之间也装配有轴承。各并轴从动轴上均装配有两个并轴公转轮,分别位于并轴主动轮的两侧;并轴主动轴上安装有两个并轴从动轮,两个并轴从动轮分别位于并轴主动轮的两侧。位于同一侧的两个并轴公转轮均通过传动带传动装配在对应的并轴从动轮上。并轴主动轮上还设置有四个并轴撑顶轴,分别位于同一矩形的四个拐角处;各并轴撑顶轴上均设置有两个并轴撑顶轮,分别位于并轴主动轮的两侧。并轴撑顶轮能够撑顶并轴主动轮和对应并轴公转轮之间的传动带。
并轴驱动机构还包括两个分别设置在并轴主动轮两侧的并轴连接板,各并轴从动轴、各并轴撑顶轴的两端分别安装在对应的并轴连接板上。其中,各并轴从动轴的两端均通过轴承转动装配在对应的并轴连接板上,而各并轴撑顶轴的两端均通过顶丝固定在对应的并轴连接板上;并轴连接板上设置有供各并轴撑顶轴插入的通孔,当并轴撑顶轴插入后,通过从各通孔的侧壁旋入顶丝即可实现对并轴撑顶轴端部的固定。各并轴连接板与并轴主动轮之间均固定有两个并轴加强板,同一侧的两个并轴加强板关于转动中心对称;各并轴加强板的两侧均通过螺丝进行固定。
4.2 并轴驱动机构的传动原理
并轴驱动机构运行时,并轴驱动电机通过传动带带动并轴主动轮转动,并轴主动轮的转动又会带动各并轴从动轴和各并轴公转轮进行公转,并轴公转轮的公转又会带动对应的并轴从动轮进行转动,从而带动并轴主动轴的转动,这样并轴主动轴即可从输出端输出动力。
4.3 并轴驱动机构的整体设计
第一、四、五、六驱动机构均为并轴驱动机构,其驱动电机和减速机并列布置。并轴驱动机构的减速机设置有并轴主动轮,并轴主动轮的圆心位置转动装配有并轴主动轴,偏心位置转动装配有多个并轴从动轴;并轴主动轴上设置有并轴从动轮,各并轴从动轴上均设置有并轴公转轮,并轴公转轮与并轴从动轮之间传动连接。并轴驱动机构的减速机还包括两个分别设置在并轴主动轮两侧的并轴连接板,各并轴从动轴的端部均转动装配在对应的并轴连接板上,并轴主动轮与对应的并轴连接板之间均安装有并轴加强板。此种结构通过设置并轴连接板和并轴加强板使得并轴驱动机构的减速机形成一个整体。并轴主动轮上还设置有多个并轴撑顶轴,各并轴撑顶轴均安装有并轴撑顶轮,两端分别通过顶丝固定在对应的并轴连接板上。并轴撑顶轮的设置能够撑顶传动带或传动链,从而保证传动的良好运行,避免了传动过程中打滑的问题;而并轴撑顶轴的设置还起到了加强减速机结构的作用,使得减速机成为一个整体。
5 结论
关节机器人并轴驱动机构传动部件的整体设计,保证驱动机构具有良好的传动性能,避免了传动过程中打滑的问题,还起到了加强减速机结构的作用。因并轴驱动机构采用空心的管状结构,重量轻,缩减了材料成本,可实现空中布导线(俗称空中走线),更有利于减速机作业时运行平稳,提高六轴关节机器人作业时的稳定性。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
山东冶金(2022年1期)2022-04-19
房地产导刊(2020年11期)2020-12-28
绿色科技(2019年22期)2019-12-30
铁道通信信号(2019年4期)2019-10-10
高考·上(2019年1期)2019-09-10
无锡商业职业技术学院学报(2018年3期)2018-06-29
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16
现代制造技术与装备(2015年4期)2015-12-23