
基于干扰观测器的运载火箭助推段姿态控制
2020-06-22 11:05胡冠杰郭建国贾生伟
导弹与航天运载技术 2020年3期
胡冠杰,郭建国,贾生伟
基于干扰观测器的运载火箭助推段姿态控制
胡冠杰1,郭建国1,贾生伟2
(1. 西北工业大学精确制导与控制研究所,西安,710072;2. 南京航空航天大学,南京,210016)
针对刚体运载火箭助推飞行段的姿态控制问题,提出了一种基于干扰观测器的自适应滑模控制方法。首先,根据姿态动力学模型建立了面向姿态控制的通用模型。其次,针对通用模型中参数不确定性和外界干扰,设计了干扰观测器实时观测后补偿到自适应滑模控制器中,并结合Lyapunov稳定性理论分析了控制器的稳定性。最后,对比传统的PD控制器,在模拟大气环境中进行了姿态控制系统仿真。仿真结果表明,该方法与传统控制方法相比,控制精度和鲁棒性显著提高。
运载火箭;干扰观测器;自适应滑模控制;PD控制;Lyapunov稳定性
0 引 言
运载火箭的姿态控制系统是保持火箭稳定飞行的关键系统[1],国内外普遍采用比例-微分控制[2]。由于传统方法的局限性[3],必须采用鲁棒控制方法来抑制飞行过程中的不确定性。滑模变结构控制对于大范围的参数摄动、不可测的有界干扰以及未建模态具有很好的抑制作用,得到了学者们的广泛研究[4~6]。
Stott等将可以避免抖振问题的高阶滑模控制应用于运载火箭的姿态控制中,并仿真验证了高阶滑模控制较强的鲁棒性[7]。Shtessel等提出了基于干扰观测器的双回路时变滑模控制,外回路控制箭体转动速率,内回路满足力矩转动速率要求[8]。Ansari等介绍了自适应模糊积分滑模控制在卫星运载火箭上纵向姿态跟踪中的应用[9]。张亮等针对垂直起降可重复使用运载火箭,研究了一种基于扩展状态观测器的非奇异快速终端滑模控制方法[10]。于亚男等提出了基于双幂次趋近律柔性火箭滑模变结构控制,能够有效抑制变结构控制引起的高频抖振[11]。
本文提出了一种基于干扰观测器的自适应滑模控制方法,借助干扰观测器对火箭内外的干扰进行观测,将观测到的不确定项和各种扰动再补偿到控制器中。同时自适应滑模控制方法可以消除控制系统滑模抖振的影响。最后,通过对比仿真,验证了结合干扰观测器的自适应滑模控制器具有更强的鲁棒性,更适用于运载火箭姿态控制系统。
1 研究对象及动力学模型
忽略长周期的质心运动,且不考虑液体推进剂晃动和箭体弹性振动,刚体运载火箭姿态动力学模型如下[12]:
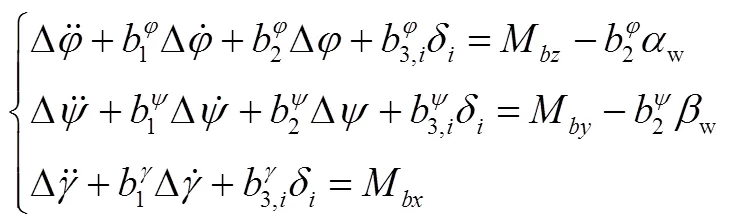

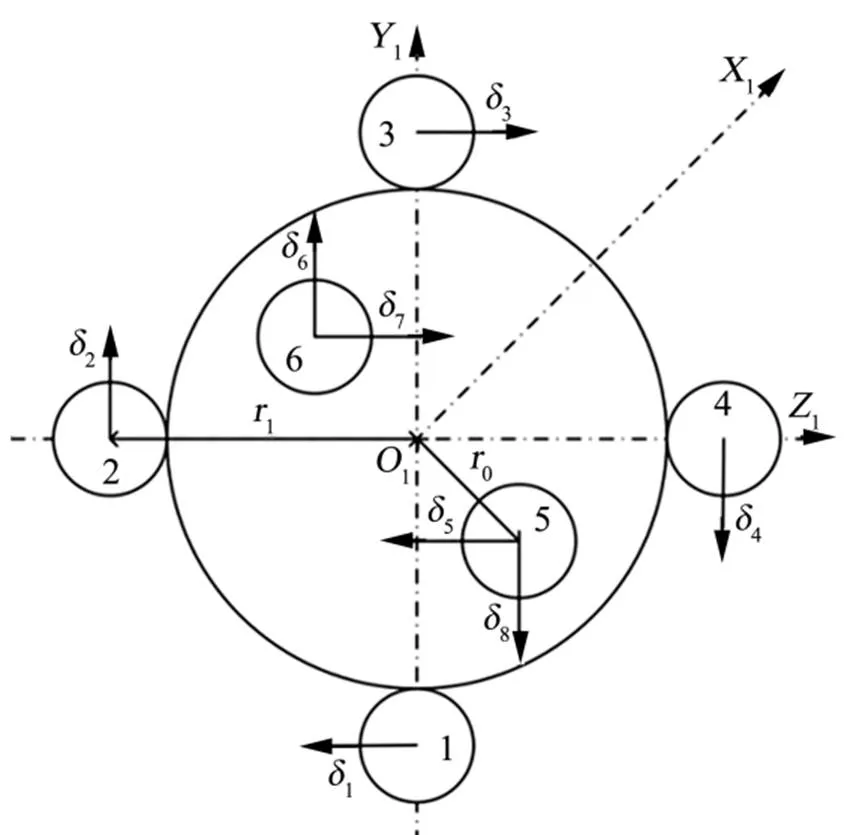
图1 发动机布局示意
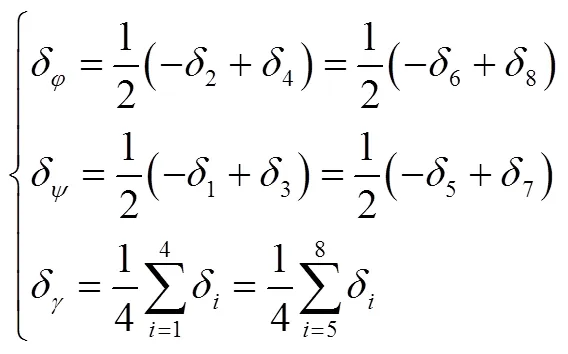
芯级发动机和助推发动机同向同比例摆动,有发动机实际摆角和等效摆角关系为
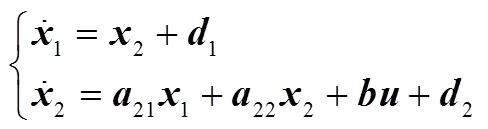
进一步针对运载火箭建立面向姿态控制的通用模型,用下式表示:
2 结合干扰观测器的自适应滑模控制器设计
2.1 干扰观测器(DOB)设计
针对动力学模型式(3),设计干扰观测器[13]:
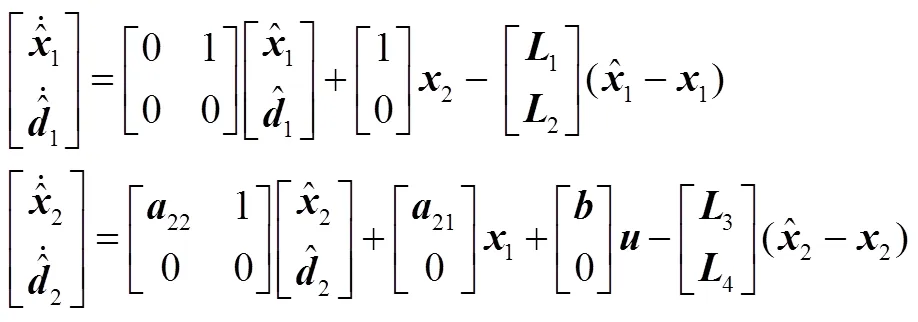
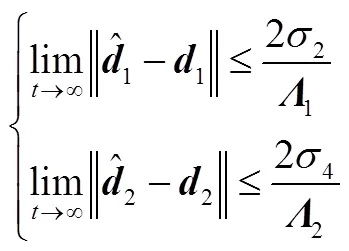
由文献[13]可以得到干扰的观测值与真值之间的误差界限所满足如下的关系:
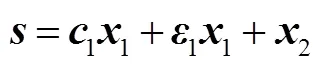
2.2 自适应滑模控制器(ASMC)设计
提出一个新型自适应滑模面
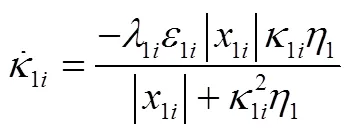
自适应滑模的趋近律设计如下:
采用如下的自适应滑模控制律:



其中,

2.3 稳定性证明
将式(13)代入模型(3)得到:

定义李亚普诺夫函数如下:
对其求导可得:

对系统的自适应滑模面式(6)微分可得:

将设计的滑模控制律(10)代入模型(3)中,结合式(18)可得:

定义李亚普诺夫函数如下:
对其求导,可得:


对式(23)进行求解得到:
另外,
对式(25)进行积分得到:


联合式(5)、(22)和式(28),可以推导出:

3 仿真与分析
3.1 控制器性能对比仿真分析
考虑运载火箭姿态控制传统的PD控制器:

不改变控制器参数,再将运载火箭的气动参数、转动惯量分别正、负拉偏20%。PD控制器与结合干扰观测器的自适应滑模控制器的仿真对比结果如图2和图3所示。运载火箭在参数正、负拉偏的情况下,结合干扰观测器的自适应滑模控制器上升速度较快,并且基本没有稳态误差。但是PD控制器上升速度较慢,超调量和稳态误差更大,这是火箭飞行时不允许出现的。因此结合干扰观测器的自适应滑模控制器相较PD控制器性能更好。
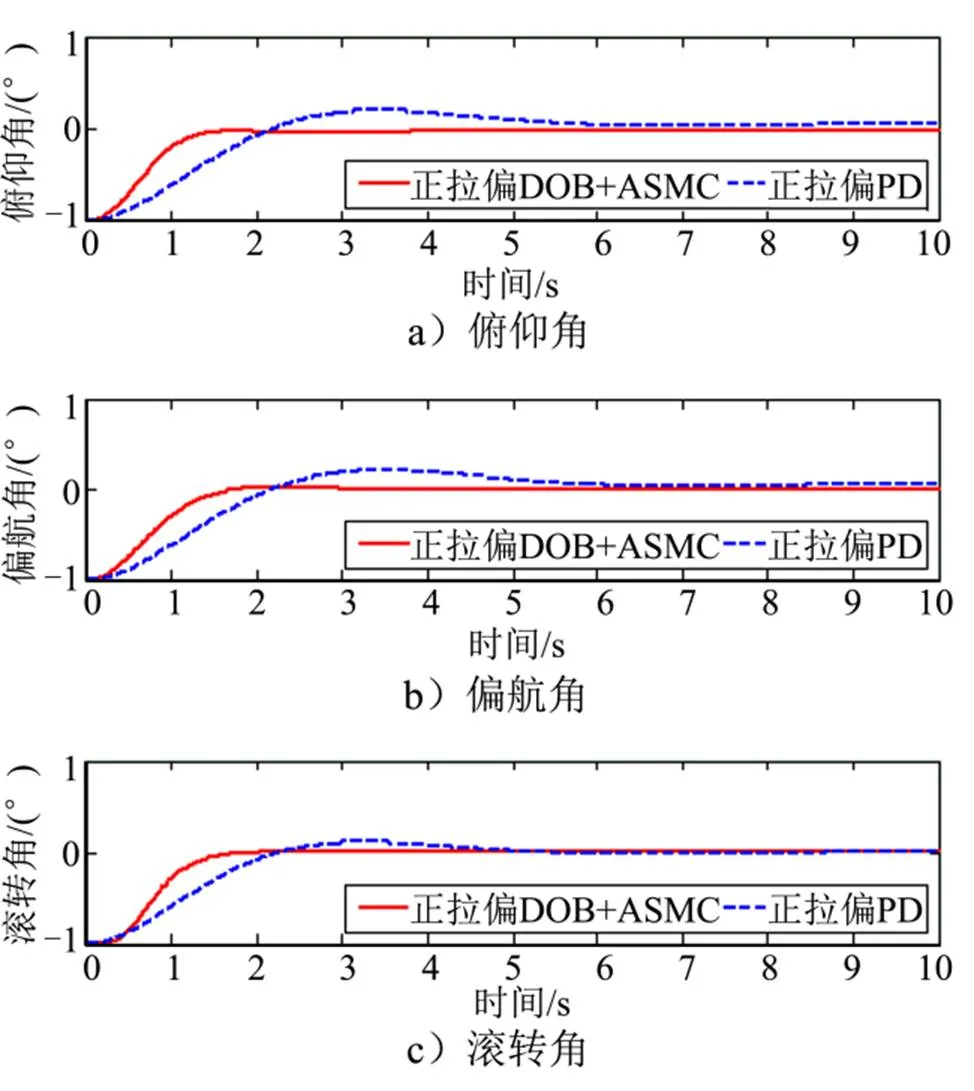
图2 参数正拉偏情况姿态角变化
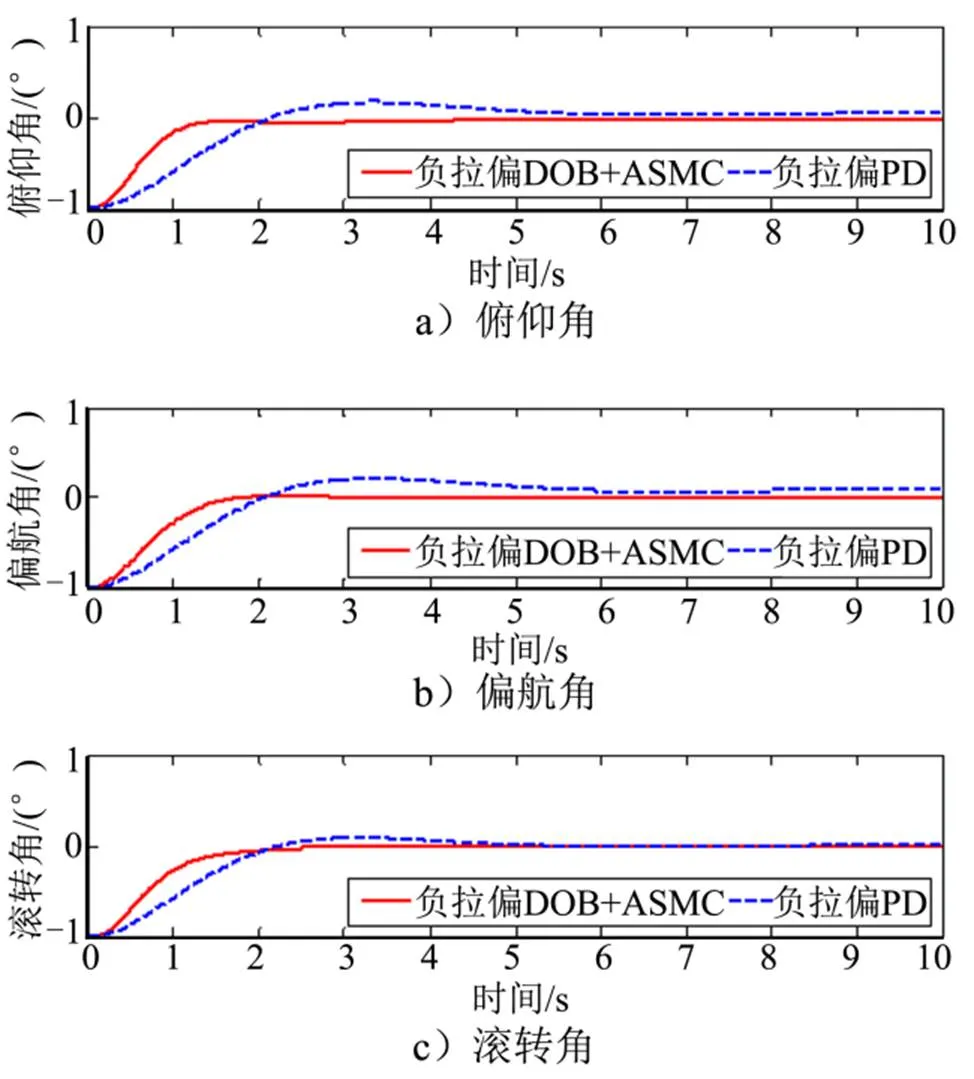
图3 参数负拉偏情况姿态角变化
3.2 运载火箭助推段仿真

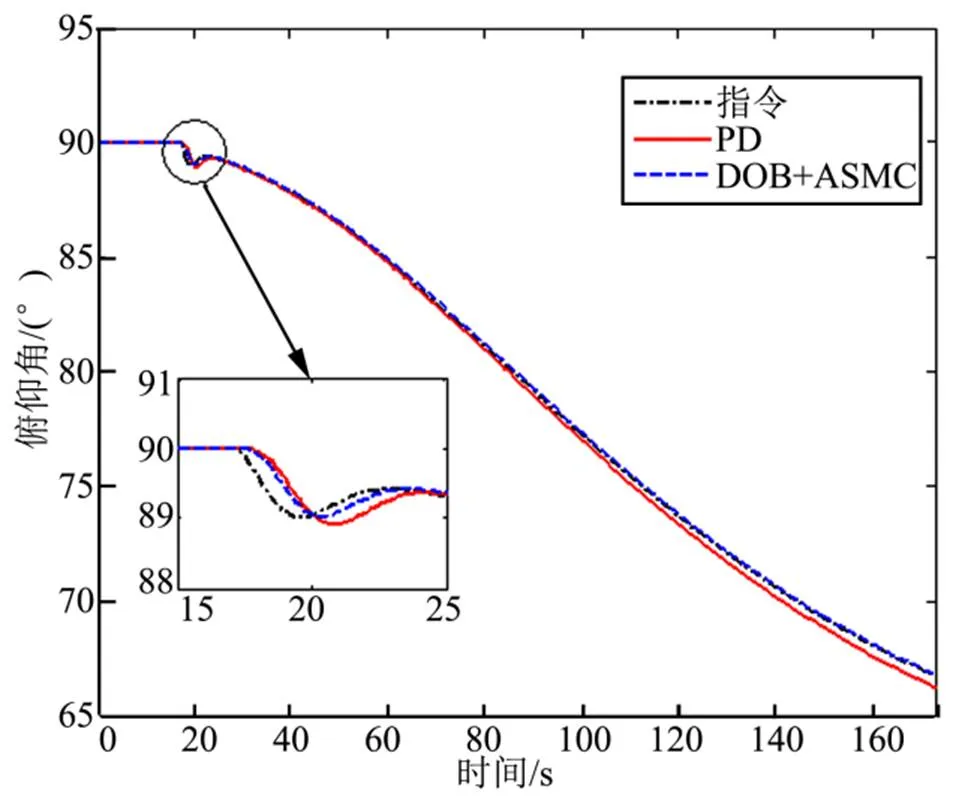
图4 助推段俯仰角对比
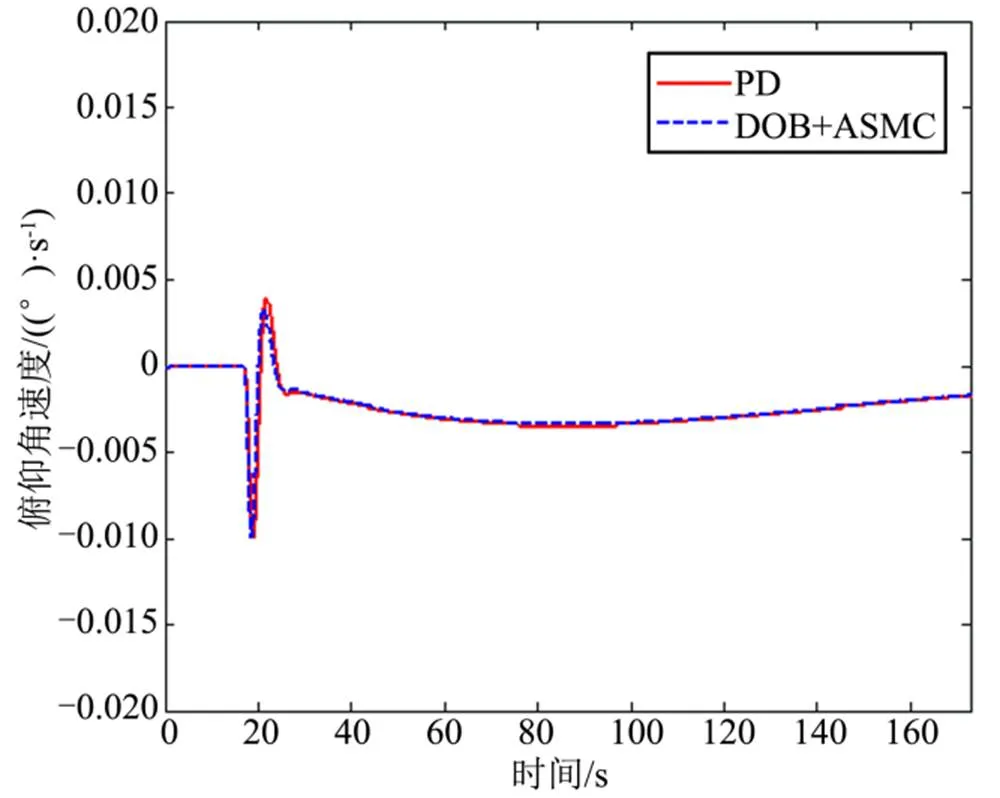
图5 助推段俯仰角速度对比
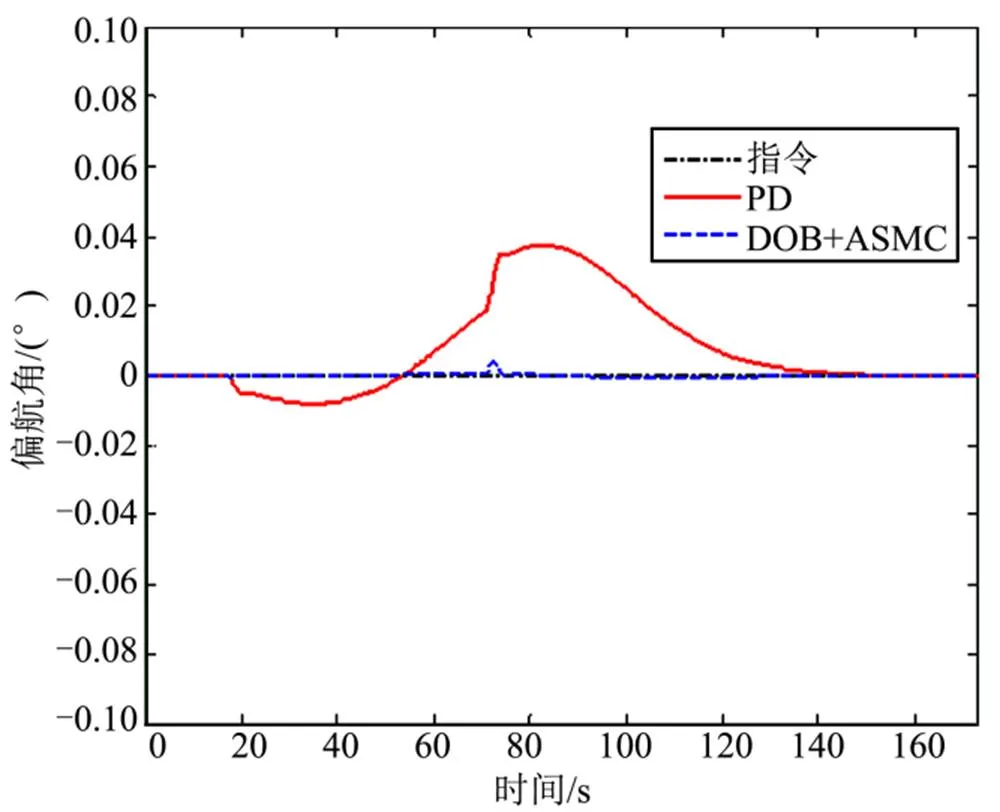
图6 助推段偏航角对比
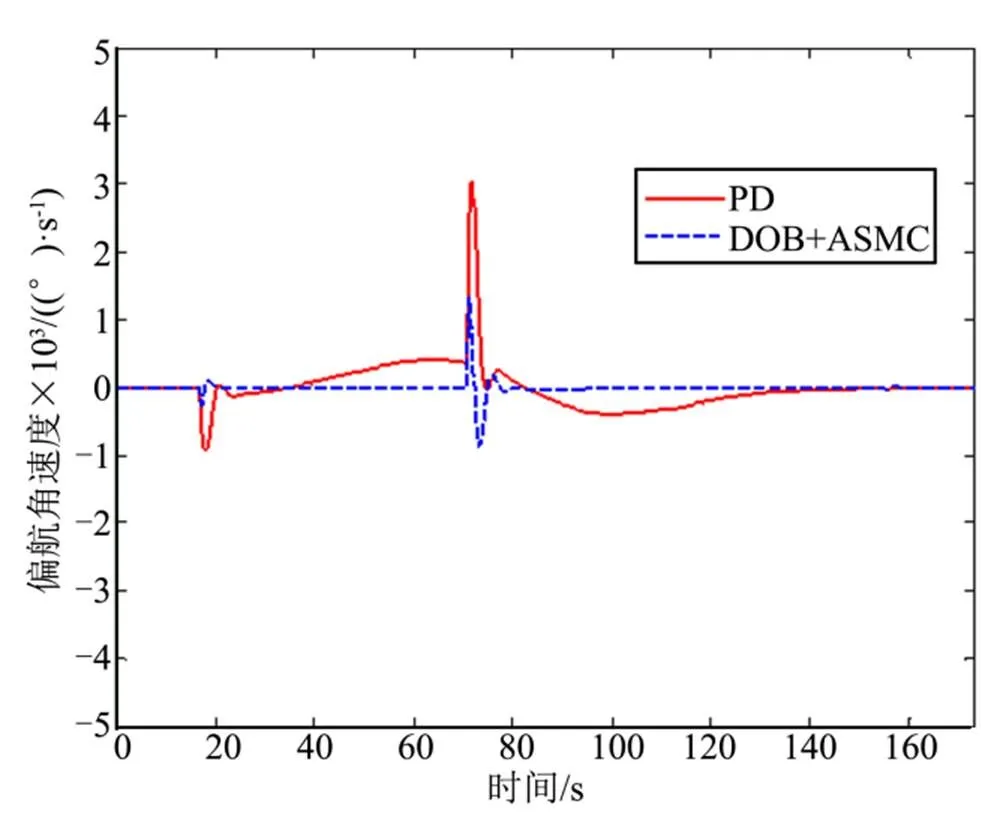
图7 助推段偏航角速度对比
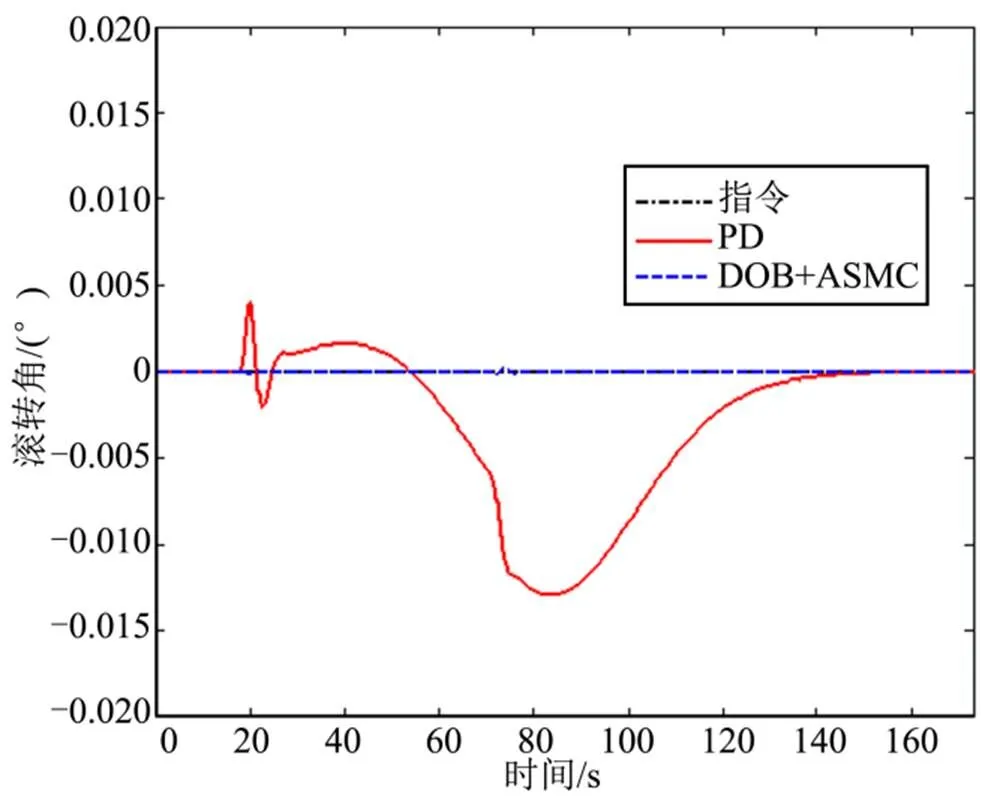
图8 助推段滚转角对比
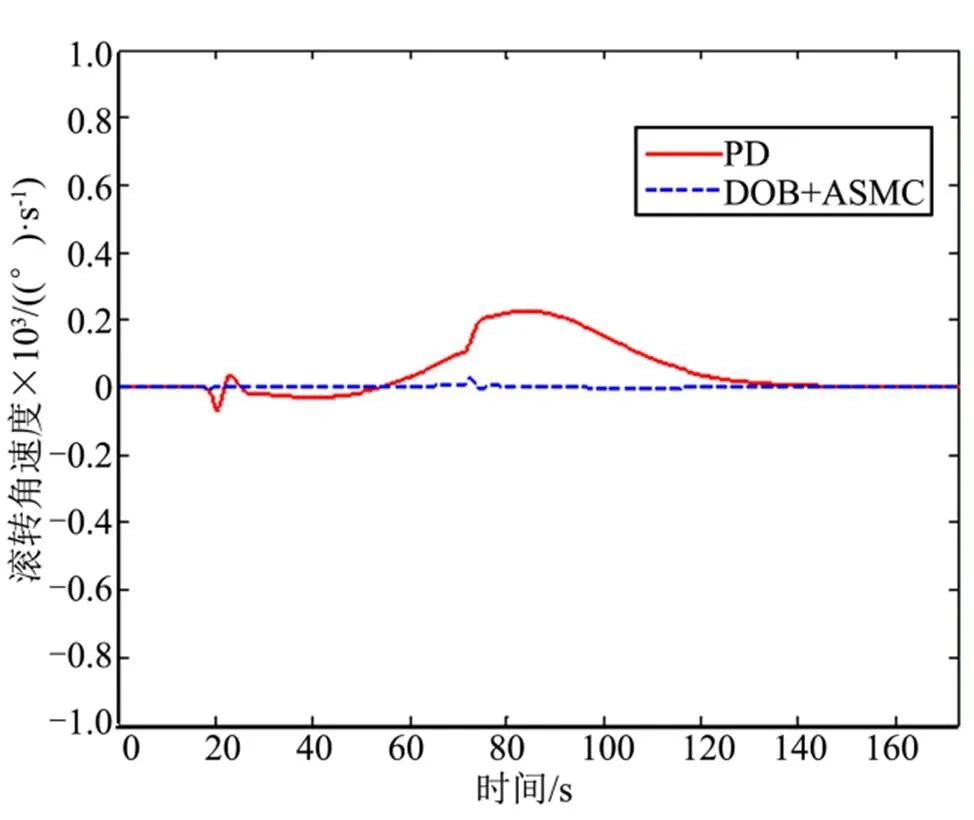
图9 助推段滚转角速度对比
在俯仰通道上,随着飞行时间增加,PD控制器跟踪俯仰角指令产生的误差逐渐增大。两种控制器均可以将俯仰角速度保持在比较小的范围内。在偏航通道上,PD控制器在火箭速度头最大时刻附近偏航角跟踪出现较大误差,干扰观测器能对气动参数的不确定性进行观测,再补偿到自适应滑模控制器,从而保证精确跟踪偏航角指令。图7中PD控制器使火箭的偏航角速度受气动参数影响变化较大,结合干扰观测器的自适应滑模控制器使火箭的偏航角速度能始终保持在零附近。
在滚转通道上,由于助推段气动参数变化的影响,PD控制器会使火箭一直在滚转,在速度头最大时刻火箭滚转角达到最大。结合干扰观测器的自适应滑模控制器基本保持滚转稳定在零附近。PD控制器使火箭的滚转角速度受气动参数影响变化较大,结合干扰观测器的自适应滑模控制器使火箭的滚转角速度能始终保持在零附近。
4 结束语
本文提出了一种基于干扰观测器的自适应滑模控制方法,能够保证运载火箭在复杂的大气环境中控制姿态稳定,完成助推段飞行。由于运载火箭参数不确定和外界干扰复杂,干扰对控制器性能影响较大,必须通过干扰观测器的补偿才能获得期望的控制性能。传统的PD控制器不具备较强的抗干扰能力,鲁棒性较差。
[1] 龙乐豪. 液体弹道导弹与运载火箭系列——总体设计(上)[M]. 北京: 中国宇航出版社, 1989.
[2] 张卫东, 刘玉玺, 刘汉兵, 等. 运载火箭姿态控制技术的发展趋势和展望[J]. 航天控制, 2017, 35(3): 85-89.
[3] 徐延万. 液体弹道导弹与运载火箭系列——控制系统(上)[M]. 北京: 中国宇航出版社, 1989.
[4] You M, Zong Q, Tian B, et al. Nonsingular terminal sliding mode control for reusable launch vehicle with atmospheric disturbances[J]. Proceedings of the Institution of Mechanical Engineers. Part G: Journal of Aerospace Engineering, 2018, 232(11): 2019-2033.
[5] Qi D, Zong Q, Tian B, et al. Adaptive disturbance observer-based finite-time continuous fault-tolerant control for reentry RLV[J]. International Journal of Robust & Nonlinear Control, 2017, 27(18): 4275-4295.
[6] Wang F, Zou Q, Hua C, et al. Finite-time attitude tracking control design for reusable launch vehicle in reentry phase based on disturbance observer[J]. Advances in Mechanical Engineering, 2017, 9(12): 168781401774407.
[7] Stott J E, Shtessel Y B. Launch vehicle attitude control using higher order sliding modes[C]. Toronto, Ontario Canada: AIAA Guidance, Navigation, and Control Conference, 2010.
[8] Stott J E, Shtessel Y B. Launch vehicle attitude control using sliding mode control and observation techniques[J]. Journal of the Franklin Institute, 2012, 349(2): 397-412.
[9] Ansari U, Bajodah A H. Adaptive fuzzy integral sliding mode control application to the launch vehicle’s orbital injection problem[J]. Journal of King Abdulaziz University Engineering Sciences, 2015, 26(2): 67-84.
[10] Liang Z, Changzhu W, Rong W, et al. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle[J]. Aerospace Science and Technology, 2018(82-83): 70-79.
[11] 于亚男, 等. 基于双幂次趋近律柔性火箭滑模变结构控制[J]. 航天控制, 2018, 36(2): 20-24.
Yu Yanan, et al. Sliding mode control of flexible launch vehicles based on double power reaching law[J]. Aerospace Contrl, 2018, 36(2): 20-24.
[12] 朱海洋, 等. 适应运载火箭推力下降故障的神经网络容错控制方法[J]. 航天控制, 2019, 37(4): 3-9.
Zhu Haiyang, et al. A neural network fault-tolerant control method for launch vehicles with thrust decline[J]. 航天控制, 2019, 37(4): 3-9.
[13] 张天翼, 周军, 郭建国. 基于干扰观测器的高超声速飞行器预测控制器设计[J]. 航空学报, 2014, 35(1): 215-222.
Zhang Tianyi, Zhou Jun, Guo Jianguo. Design of predictive controller for hypersonic vehicles based on disturbance observer[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(1): 215-222.
Launch Vehicle Attitude Control Based on Disturbance Observerin Boost-phase
Hu Guan-jie1, Guo Jian-guo1, Jia Sheng-wei2
(1. Institute of Precision Guidance and Control, Northwestern Polytechnical University, Xi′an, 710072;2. Nanjing University of Aeronautics and Astronautics, Nanjing, 210016)
Aiming at the attitude control problem of rigid body launch vehicle in boost-phase, an adaptive sliding mode control method based on disturbance observer is proposed. First, a general model for attitude control is established based on the attitude dynamics model. Secondly, in view of the parameter uncertainty and external interference in the general model, a disturbance observer is designed to observe them in real time and compensate them to the adaptive sliding mode controller, and the stability of the controller is analyzed in conjunction with the Lyapunov stability theory. Finally, compared with the traditional PD controller, the attitude control system simulation is carried out in the simulated atmospheric environment. Simulation results show that this method has significantly improved control accuracy and robustness compared with traditional control methods.
launch vehicle; disturbance observer; adaptive sliding mode control; PD control; Lyapunov stability
1004-7182(2020)03-0015-06
10.7654/j.issn.1004-7182.20200303
V448.1
A
胡冠杰(1996-),男,博士研究生,主要研究方向为飞行器制导、控制与仿真。
郭建国(1975-),男,博士,教授,博士生导师,主要研究方向为飞行器制导、控制与仿真,先进控制理论及应用。
贾生伟(1980-),男,研究员,主要研究方向为飞行器总体设计技术。
2020-05-09;
2020-05-11
猜你喜欢
微电机(2022年8期)2022-10-12
火力与指挥控制(2022年6期)2022-07-25
计算机与数字工程(2022年4期)2022-05-10
计算机仿真(2021年3期)2021-11-17
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
科技研究·理论版(2021年22期)2021-04-18
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
电脑知识与技术(2016年28期)2016-12-21
