一款并联工业机器人的设计
2020-06-28 14:20陈文华陈炜镔梁志聪
科学技术创新 2020年16期
陈文华 陈炜镔 梁志聪
(广州城建职业学院,广东 广州510925)
1 研究背景
自从1961 年推出第一台工业机器人以来,机器人技术发展相当迅速,已经广泛应用于汽车制造、电子产品设计、核工业、服务业和医疗卫生等许多方面。1985 年,Clavel 设计了第一款Delta 并联机器人。Delta 并联机器人是一种具有3 个平动自由度的高速并联机器人,具备结构紧凑稳定,精度高,机器刚性高,承载能力大的特性。本设计完成一款并联工业机器人设计,其结构如图1 所示。
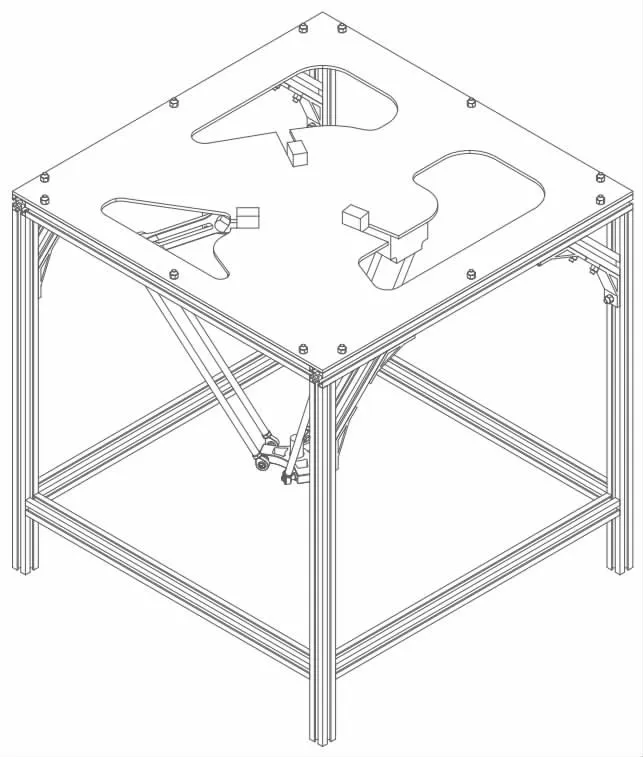
图1 并联工业机器人外形图
2 并联机器人设计
2.1 并联机器人机械结构设计
并联机器人通过控制步进电机的转动从而实现下运动平台运动,下运动平台可以安装吸盘和机械收等装置。如图2 所示:1 上固定平台;2 步进电机;3 电机接头;4 电机支架;5 主动臂;6 球铰接;7 从动臂;8 下运动平台;9 限位开关。并联机器人通过下运动平台上安装的吸盘或机械手,来可吸取或抓取产品。上固定平台下方对称固定3 个步进电机,步进电机通过电机接头与主动臂相连接,主动臂通过球铰接与从动臂相连,从动臂另一端通过球铰接与下运动平台相连,并且下运动平台与上固定平台平行,如图3 所示。
2.2 并联机器人电源系统设计
并联机器人电源系统原理图,如图4 所示。首先接入220V的交流电源,在通过CANNY WELL,CANNY WELL 是一个滤波器,经过滤波器之后就到总开关。总开关出来是一个由变压器220V(300W),变压器出来的电压是交流大约是48V,之后经过一个两个3000uF 一个电阻的滤波,然后给三个步进驱动器供电,确保电压满足驱动器要求,以防电压过高烧坏驱动器和步进电机。图5 是急停按钮和开关按钮,急停按钮是停止步进电机,急停按钮的输入端连到步进的DIR 和STEP,防止撞机行为。而开关按钮是负责控制控制系统的电源。
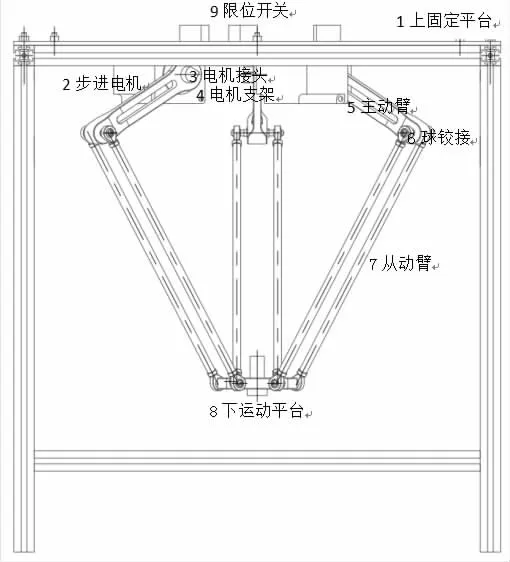
图2 并联机器人结构图(1)
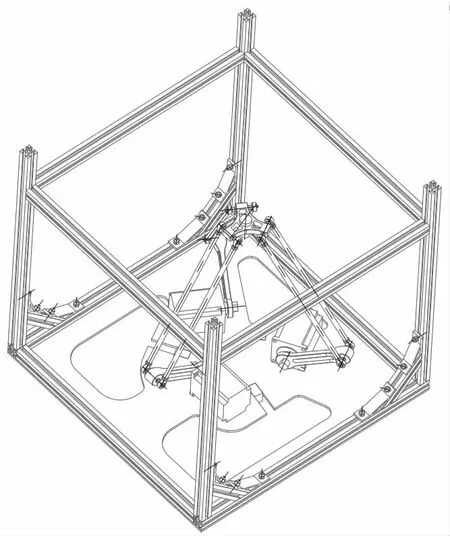
图3 并联机器人结构图(2)

图4 并联机器人电气控制原理图

图5 急停按钮和开关按钮
2.3 步进电机控制原理图
步进电机分为两类,分别有42 步进和57 步进。本次设计选用的是42 步进电机。42 步进电机是混合式步进电机中用量最大的品种,产品性价比比较高,所以会优先考虑。如果在中低速场合使用,建议把电机串联接线,在串联接线时,电阻变成2 倍,电感是4 倍,额定电流0.7 倍,保持力矩是1.4 倍,如图6 所示。
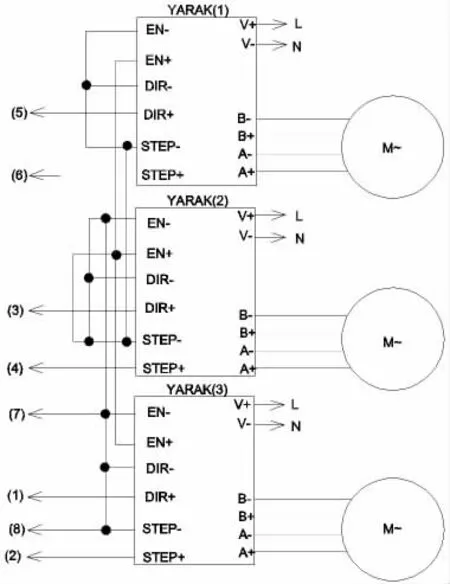
图6 步进电机控制原理图
2.4 并联机器人主控制系统
并联机器人主控制系统是由0120052、CT6N137、0170052、AMS1117DN811、SCM848PLS、SP3435E 芯片、两个电解电容组成,如图7 所示。在最下面那一端PV01、DV01 分别接到我们步进驱动器的DIR+端和STEP+端,并且CT6N137 和0170052 芯片都是对应每一个不同的驱动器。电脑通过RS485 对机器人进行控制,电脑是主站,控制系统是从站,主站给信号从站来执行命令。最上面那一段有两个接口是接到吸盘,并且由SP3435E芯片来控制。两端限位接口和7 端是接到步进EN+、8 端是接到步进的STEP-,两端限位还短接一个急停按钮的输入端,用于防止撞机行为发生。
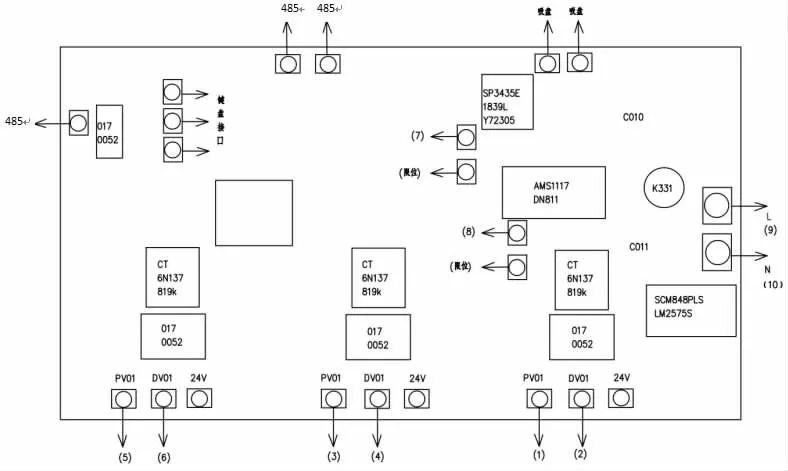
图7 并联机器人控制系统
2.5 并联机器人通讯设计
Modbus 是一种串行通讯协议,于1979 年为使用可编程逻辑控制器(PLC)通讯而发表。Modbus 是工业领域通讯协议的业界标准(De facto),是目前比较常用的通讯方式。Modbus 协议目前存在用于串口、以太网以及其他支持互联网协议的网络的版本,大多数Modbus 设备通讯通过串口EIA-485 物理层进行。在调试过程中,遵循Modbus 通讯过程,采用MODBUS-RTU 指令,使用读寄存器命令(03)和写寄存器命令(06)及写多个寄存器指令(10),如图8 所示。主机:与并联机器人进行通讯的设备,计算机。它在485 总线上发起命令。从机:响应主机命令的设备,在此指机器人的控制器。它在收到主机的命令后,根据命令做出响应。
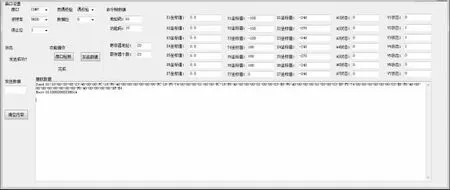
图8 串口通信
系统采用循环冗余校验(CRC)来检测或校验数据传输或者保存后可能出现的错误。它是利用除法及余数的原理来作错误侦测的。
3 结论
本文从并联机器人结构、系统电源设计、步进电机控制、主控制系统、通讯系统等方面进行设计。并联机器人具有结构紧凑稳定,进度高,机器刚性高,承载能力大。广泛应用于汽车制造、电子产品设计、核工业、服务业和医疗卫生等许多方面。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
汽车实用技术(2022年16期)2022-08-31
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
北京航空航天大学学报(2017年5期)2017-11-23
科技创新导报(2016年4期)2016-11-19
科学家(2015年12期)2016-01-20