矿井带式输送机故障巡检机器人系统的研究
2020-06-29 13:10赵海明
江西化工 2020年3期
赵海明
(汾西矿业集团高阳煤矿,山西 孝义 032300)
当前,带式输送机常规的故障排除仍是通过人工巡检方式,存在劳动强度大、检测效果差等问题,随着自动化技术以及计算机技术的快速发展,带式输送机远程监控系统已经在部分矿井应用推广[1~3]。但是由于带式输送机输送距离长、设备多,造成远程监控系统繁杂、成本高等问题。因此,文中提出采用故障巡检机器人,对带式输送机进行自动巡检,提高了故障排除效率,并降低作业人员劳动强度。
1 巡检机器人系统组成
巡检机器人是集中传感器、自动化、网络通信以及计算机为一体的综合自动监控装置,具有体积小、运行稳定、动作灵活等优点。巡检机器人硬件结构可分监控数据采集,传输及监控部分,具体见图1。
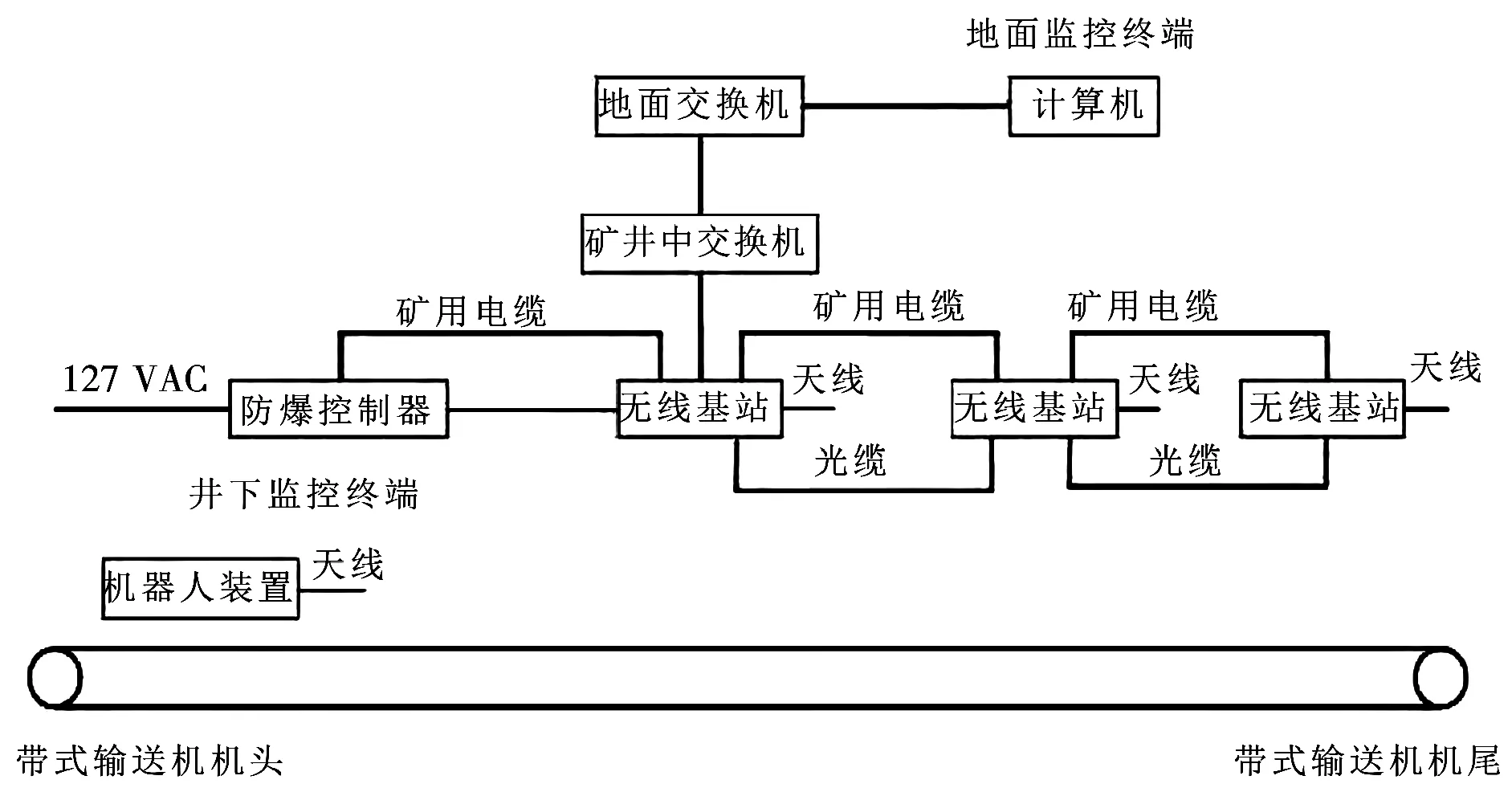
图1 巡检机器人系统硬件结构
数据采集部分包括巡检机器人装置、传动系统等,其中,巡检机器人由监测传感器(烟雾、温度及音频传感器)、机器人本体、高清摄像机等构成;传动系统包括电机、钢丝绳及驱动绳轮等,机器人本体通过抱索器顺着布置的钢丝绳沿着带式输送机往返运行,在机器人上安设的各类传感器用以检测带式输送机各个位置的环境参数,从而掌握带式输送机运行状况[5~6]。采用防爆充电箱为机器人装置提供动力源。
信号传输及监控部分包括地面、井下监控终端、通信基站(无线传输)、交换机(地下、地面)。通信基站沿着带式输送机布置方向每隔100 m布置一个,供电选用127V交流电,基站间及基站与井下监控终端间通信采用光缆方式,在基站上安装有无线通信模块。基站与井下监控终端间通过RJ45接口通信,监控终端可用以数据存储。基站与井下交换机完成数据传输,将基站接收到的数据经交换机传输给地面监控终端。
2 巡检机器人本体及数据采集系统设计
2.1 巡检机器人本体
具体巡检机器人装置结构见图2,包括机器人本体、摄像机、各类监测传感器以及摄像补光照明装置等。

图2 巡检机器人本体结构
外置摄像机1布置于接线腔左侧端面,内置摄像机2布置于接线腔外壁,摄像机周边均布置补光等,温度、声音烟雾传感器等布置在在接线腔外侧。在主控制腔外侧安装有可旋转高清摄像机2,主控制腔旁为电池腔,内部安装铅酸电池。电池腔内电池采用防爆充电箱充电。
2.2 数据采集系统设计
布置的巡检机器人数据采集系统如图3所示。硬件结构包括电源、处理器、交换机、传感器、摄像机、交换机、无线终端。数据处理器是整个数据采集系统核心组件,主要用以处理温度、声音、烟雾传感器以及摄像机探测数据。电池采用铅酸电池,单次充电可以确保数据采集系统运行超过72h。
数据采集系统可以实现传感器信息、视频监控信息以及带式输送机运行状态,乃至电动机参数数据传输,数据处理器对监测数据压缩处理,通过井下交换机传输给地面监控中心,监控人员可充分掌握井下带式输送机运行状况。

图3 巡检机器人数据采集系统结构组成
3 控制系统设计
3.1 控制系统功能
巡检系统功能主要包括有:
1)带式输送机运行环境检测数据采集
巡检机器人通过抱索器在钢丝绳上往返运动,通过布置在本体上的传感器、摄像机对巡检区域的带式输送机运行状态、实时图像、环境参数进行采集。
2)数据存储
采用地面监控PC,将巡检机器人采集到的图形信息、温度、声音等信息存储至指定存储路径,便于监控人员对检监测数据进行分析。
3)监控画面显示及切换
在巡检机器人上布置有3个高清摄像机,可以显示3个不同的视频监控画面,同时又可以显示放大后的各路视频监控画面。在巡检机器人上布置的摄像机3可以可以进行角度调整,在120°范围内对监控范围进行调整。
4)故障报警
系统获取到巡检机器人检测信息后,将检测数据与预先设定数据对比。如果超过预先设定值,控制系统会发出警报信息,通过控制器实现带式输送机停机运行。同时,为了确保巡检机器人系统可以正常运行,控制系统还配备有张紧故障、电机堵转、PG编码器、限位传感器、防爆开关以及张紧开关等,提升巡检系统监控范围,增加带式输送机运行保障能力。
巡检机器人获取到的现场监测数据通过地面监控系统进行判定,当有任意一监测数据超过预警值时,经监控人员二次确认后,视故障影响程度采取设备检修或者立即停止带式输送机运行。待故障排除后,按下复位键即可实现输送机重启运行。
5)检修功能
检修功能主要是系统在安装、检修以及调试等状态时,巡检机器人本体可以超过软件、硬件限位控制继续运行。巡检机器人在本体超过硬件限位位置后,需要时刻关注巡检机器人位置。系统恢复正常后,及时关闭检修功能
3.2 控制程序设计
巡检机器人控制系统软件编制是基于STEP7 Micro WIN SP V4.0的STL环境编制,硬件系统平台为S7-200系列PLC。按照控制系统预先设定功能,巡检机器人孔隙软件功能程序划分为4个组成部分,分别为音频和视频控制程序、巡检机器人本体控制程序、带式输送机运行控制程序以及紧急停机程序。具体的控制系统主控制程序运行流程见图4。

图4 控制系统主控制程序运行流程
4 总结
文中提出一种带式输送机巡检机器人系统,可以采集带式输送机运行过程中的环境信息,及时发现运行中存在的各类故障问题,并自动发出信号,从而提升带式输送机运行可靠性。设计的巡检机器人系统经过现场工业试验,其各项性能指标均可以满足矿井井下复杂环境需要,可以应用现场带式输送机运行监控。
猜你喜欢
制造技术与机床(2019年11期)2019-12-04
中国煤炭工业(2019年3期)2019-08-27
建材发展导向(2019年11期)2019-08-24
中国设备工程(2017年11期)2017-06-29
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
山东工业技术(2016年15期)2016-12-01
新闻前哨(2015年2期)2015-03-11
中国煤炭工业(2014年11期)2014-06-20
数码(2009年3期)2009-03-16